

27. Неустановившийся режим. Решение прямой задачи динамики.
В отличие от установившегося режима движения режимы разгона и торможения называются неустановившимися. К этому режиму относят и режим движения "пуск-останов". Прямая задача динамики: определение закона движения машины при заданных внешних силовых воздействиях (как сил и моментов сопротивления, так и движущих или управляющих сил). Эта задача относится к задачам анализа, при которых параметры механизмов заданы, либо могут быть определены на предварительных этапах расчета.
Алгоритм решения прямой задачи динамики при неустановившемся режиме.
Дано: Кинематическая схема механизма и его размеры
1. Выбор динамической модели и определение ее параметров.
1.1. Определение кинематических передаточных функций для звеньев механизма, центров масс, и точки приложения движущей силы.
1.2. Определение движущей силы по условиям в начале и в конце цикла.
1.3. Определение приведенного суммарного момента.
· определение приведенного суммарного момента сил сопротивления.
· определение приведенного момента движущей силы.
1.4. Определение суммарного приведенного момента инерции.
2. Определение суммарной работы внешних сил.
3. Определение угловой скорости звена приведения.
4. Определение времени цикла.
5. Построение диаграммы угловой скорости в функции времени.
6. Определение углового ускорения звена приведения.
28. Установившийся режим движения машины. Коэффициент изменения средней скорости.
Установившийся режим движения машины наступает тогда, когда работа внешних сил за цикл не изменяет ее энергии, то есть суммарная работа внешних сил за цикл движения равна нулю.

При установившемся движении уравнение энергетического баланса:

Где
соответственно работа за цикл движущих сил и сил сопротивления, ϕ10 - начальное значение обобщенной координаты, Δϕц - приращение обобщенной координаты за цикл.
В пределах цикла текущее значение суммарной работы не равно нулю. Работа может быть то положительной, то отрицательной. При положительной величине работы машина увеличивает свою кинетическую энергию за счет увеличения скорости, то есть разгоняется. На участках, где суммарная работа отрицательна, кинетическая энергия и скорость машины уменьшается, машина притормаживается. В установившемся режиме величины увеличения скорости на участках разгона и снижения на участках торможения за цикл равны, поэтому средняя скорость движения w1ср постоянна.
Коэффициент изменения средней скорости.
Величина амплитуды колебаний скорости Δw1 определяется разностью между максимальной w1max и минимальной w1min скоростями. За меру измерения колебаний скорости в установившемся режиме принята относительная величина, которая называется коэффициентом изменения средней скорости.
Где ω₁ср = (ω₁max + ω₁min) /2 – средняя угловая скорость машины.
Для различных машин в зависимости от требований нормального функционирования (обрыв нитей в прядильных машинах, снижение чистоты поверхности в металлорежущих станках, нагрев обмоток и снижение КПД в электрогенераторах и т.д.) допускаются различные максимальные значения коэффициента изменения средней скорости. Существует нормативная документация, устанавливающая допустимые значения коэффициента неравномерности [δ].
Чтобы снизить внутреннюю виброактивность и неравномерность движения
применяются различные методы:
⇒ уменьшение влияния неравномерности внешних сил (например, применение многоцилиндровых ДВС, насосов и компрессоров с рациональным сдвигом рабочих процессов в цилиндрах);
⇒ уменьшение влияния переменности приведенного момента инерции (тоже
обеспечивается увеличением числа цилиндров в поршневых машинах, а так-
же уменьшением масс и моментов инерции деталей, приведенный момент
инерции которых зависит от обобщенной координаты);
⇒ установка на валах машины центробежных регуляторов или аккумуляторов
кинетической энергии - маховиков;
⇒ активное регулирование скорости с использованием систем автоматического управления, включая и компьютерное управление.
29. Силы в кинематических парах плоских механизмов (без учета трения).
Сила, как векторная величина характеризуется относительно звеньев механизма тремя параметрами: координатами точки приложения, величиной и направлением. Рассмотрим с этих позиций реакции в кинематических парах плоских механизмов.
1. Поступательная КП. В поступательной КП связи, наложенные на относи-
тельное движение звеньев, запрещают относительное поступательное движение по оси y и относительное вращение. Заменяя эти связи реакциями, получим реакцию Fij и реактивный момент Mij.

При силовом расчете поступательной КП определяются: реактивный момент Mij, величина реакции Fij; известны: точка приложения силы –геометрический центр кинематической пары A1п. и направление – нормаль к
контактирующим поверхностям звеньев.
Число связей в КП Sпл = 2, подвижность звеньев в КП Wпл =1, число неизвестных при силовом расчете ns = 2.
2. Вращательная КП. Во вращательной КП связи, наложенные на относи-
тельное движение звеньев, запрещают относительное поступательное движение по осям y и x. Заменяя эти связи реакциями, получим реакцию Fij.
При силовом расчете вращательной КП определяются: направление реакции Fij; величина реакции Fij; известна: точка приложения силы –
геометрический центр кинематической пары B1в .
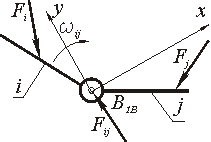
Число связей в КП Sпл = 2, подвижность звеньев в КП Wпл =1, число неизвестных при силовом расчете ns = 2.
3. Высшая КП. В высшей паре связи, наложенные на относительное движение
звеньев, запрещают движение в направлении нормали к контактирующим поверхностям (ось y). Заменяя эту связь реакцией, получим реакцию Fij.
При силовом расчете в высшей КП определяются: величина реакции Fij; известны: точка приложения силы – точка контакта рабочих профилей кинематической пары С2вп; направление вектора силы – контактная нормаль к профилям.

Число связей в КП Sпл = 1, подвижность звеньев в КП Wпл =2, число неизвестных при силовом расчете ns = 1.
30. Силовой расчет плоских рычажных механизмов без учета сил трения.
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета:
· статический – для механизмов, находящихся в покое или движущихся с малыми скоростями, когда инерционные силы пренебрежимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию); Уравнения статического равновесия:
![]()
где Fi - внешние силы, приложенные к механизму или его звеньям,
Mi - внешние моменты сил, приложенные к механизму или его звеньям.
· кинетостатический – для движущихся механизмов при известных
массах и моментах инерции звеньев, когда пренебрежение инерционными силами приводит к существенным погрешностям; Уравнения кинетостатического равновесия:
![]()
где Fui -инерционные силы, приложенные к звеньям, Mui- моменты сил инерции, приложенные к звеньям.
· кинетостатический с учетом трения – может быть проведен, когда
определены характеристики трения в КП и размеры элементов пар.
Определение числа неизвестных при силовом расчете.
2. Вращательная КП
Известны геометрические размеры элементов КП и коэффициент трения скольжения. Так как в реальных парах имеются зазоры, то на расчетной схеме пару представляют как высшую.

При силовом расчете с учетом трения во вращательной КП определяются:
-направление реакции Fij;
-величина реакции Fij;
-величина силы трения Fтрij;
Известно: линия действия нормальной составляющей проходит через центр КП точку B1в., коэффициент трения скольжения, радиус цапфы ri ≈ rj.
![]()
32. Силовой анализ зубчатой передачи.
К силовым относят зубчатые передачи, передающие значительные крутящие моменты при малой частоте вращения (зубчатые передачи шестерённых клетей прокатных станов, подъемно-транспортных механизмов и др.). Колёса для таких передач изготовляют с большим модулем. Основное точное требование к ним – обеспечение более полного использования активных боковых поверхностей зубьев, т.е. получение наибольшего пятна контакта зубьев.
При силовом расчете используется принцип Даламбера, позволяющий решение задачи динамики свести к статическому расчету. Согласно этому принципу приведение ускоренно движущейся системы в равновесие обеспечивается условным приложением к этой системе сил инерции. При этом неизвестные силы определяются из уравнений статики.
Задача силового анализа – определение сил действующих на все звенья механизма, при учете деления всех сил на 6 гр. Силы трения учитываются, если они являются значительными. На первом этапе происходит расчет без учета сил трения – начальное приближение. Цель силового анализа – определение сил реакций в кинематических парах и уравновешивающего момента или уравновешивающей силы. Учитывая все силы, действующие на механизм, включая силы инерции можно записать:
![]()
![]()
Силовой анализ проводится при заданном положении механизма.
Получаем:
где Рi – задаваемые силы; i – скорости точек приложения Рi; j – скорости вращения звеньев к которым приложены моменты сил Мj; Ni, Nj – мощности соответственно сил Рi и моментов сил Мj.Предположим, что в какой то точке звена приложена сила Рi перенесённая параллельно самой себе в соответствующую точку повёрнутого на 90 плана скоростей. Мощность этой силы можно выразить следующим образом:
 ,где
hi
– перпендикуляр, опущенный из полюса
плана скоростей на линию действия силы
Рi.Так
как полученное выше уравнение,
определяющее величину Ni,
имеет место для всех сил Рi,
действующих на другие звенья механизма,
то получаем:
,где
hi
– перпендикуляр, опущенный из полюса
плана скоростей на линию действия силы
Рi.Так
как полученное выше уравнение,
определяющее величину Ni,
имеет место для всех сил Рi,
действующих на другие звенья механизма,
то получаем: .
.
Поскольку
 ,
то:
,
то: что
и является доказательством теоремы.
что
и является доказательством теоремы.
31. Применение рычага Жуковского для определения уравновешивающей силы.
Применение рычага Жуковского позволяет определить искомые силы с помощью только одного уравнения моментов всех сил, действующих на механизм, относительно полюса плана скоростей. При применении рычага Жуковского план скоростей обычно строится повернутым.
При определении мощности двигателя и установления его типа, расчете махового колеса, состоянии характеристики регуляторов и в ряде других случаев необходимо знать только уравновешивающий момент или уравновешивающую силу, реакции в кинематических парах механизма при этом могут остаться неизвестными. В этом случае удобнее использовать теорему Жуковского: если механизм под действием системы сил, находится в состоянии равновесия, то повёрнутый на 90 в какую-либо сторону план скоростей, рассматриваемый как твёрдое тело, вращающееся вокруг полюса плана и нагруженное теми же силами, приложенными в соответствующие точки плана, также находятся в равновесии.
Теорему Жуковского можно применить и к системе, не находящейся в равновесии. Для этого достаточно ,кроме сил приложить и силы инерции.
Для
доказательства теоремы воспользуемся
принципом возможных перемещений: если
система находится в равновесии, то
сумма элементарных работ на возможных
перемещениях равна нулю (возможные
перемещения – это перемещения допускаемые
связями): или
разделив на dt,
или
разделив на dt,
Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. В противном случае, к системе уравнений кинетостатики необходимо добавить уравнения деформации звеньев, необходимые для раскрытия статической неопределимости механизма. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей
![]()
где ns - число неизвестных в силовом расчете.
33. Силы в кинематических парах с учетом трения.
1. Поступательная КП:
При силовом расчете с учетом трения в поступательной КП определяются:
-реактивный момент Mij,
- величина реакции Fij;
-направление вектора Fij;
Известны: точка приложения силы - геометрический центр кинематической пары A1п. и коэффициент трения скольжения f .

Полная величина реакции в КП равна векторной сумме
![]() или
или
![]()
Где
![]() - сила трения скольжения, ϕ
- угол трения , f
- коэффициент трения скольжения (tg
ϕ ≈ f , так
как ϕ
мало).
- сила трения скольжения, ϕ
- угол трения , f
- коэффициент трения скольжения (tg
ϕ ≈ f , так
как ϕ
мало).