

17. Планы ускорений плоских рычажных механизмов.
План ускорений - построение треугольников ускорений, выполненное на отдельном участке чертежа и произведенное из одной общей точки.
Полюсом плана ускорений называется произвольная точка плоскости чертежа, из которой производится построение плана ускорений.
Нормальное ускорение ведущего звена:
![]()
Нормальное ускорение направлено из точки к центру вращения.
Касательное ускорение:
![]()
При отсутствии углового ускорения касательное ускорение равно нулю.
Ускорение точки В определится из векторного уравнения:
![]()
16. Планы скоростей плоских рычажных механизмов.
План скоростей строится для определения скоростей точек (кинематических пар, центров тяжести) и угловых скоростей звеньев механизма.
Построение плана скоростей начинается с того, что мы строим на чертеже механизм в стандартном масштабе, ставим на чертеже точку и обозначаем ее буквой «р» - это полюс плана скоростей, из этой точки выходят скорости всех точек механизма. Далее вычисляем скорость точки принадлежащей входному звену – как правило, кривошипу. Задаемся длинной отрезка соответствующего скорости этой точки, вычисляем масштаб плана скоростей. Потом составляем векторное уравнение для скорости точки – кинематической пары принадлежащей ближайшей к кривошипу группе Ассура. В соответствии с уравнением находим скорость этой точки, скорости остальных точек принадлежащих этой группе Ассура определяем по свойству плана скоростей.
Свойство плана скоростей:
Каждому звену механизма соответствует подобная ей фигура на плане скоростей, только повернутая под определенным углом и в другом масштабе. Т.е. звено треугольное – то на планах будет подобный ему треугольник. Таким образом, можно найти положение остальных точек на плане, составив элементарные пропорции.
После построения плана скоростей определяются искомые величины.
колеса 1 к колесу 3 при неподвижном водиле Н:

Верхний индекс в круглых скобках обозначает неподвижное звено механизма. В нижнем индексе первая цифра обозначает вал ведущего, а вторая – вал ведомого (выходного звена).
Из последнего уравнения находим формулу для определения передаточного отношения планетарного механизма от колеса 1 к водилу Н при неподвижном опорном колесе 3:
![]()
Передаточное отношение от водила Н к колесу 1 находим, как обратное передаточное отношение:
![]()
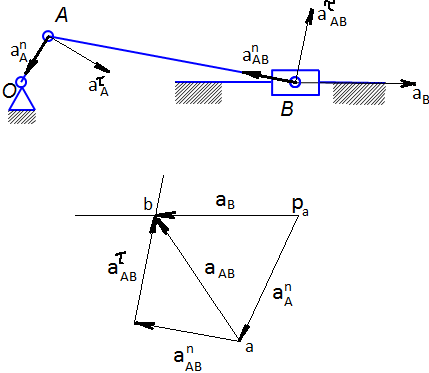
Известны направление ускорения аnВА - оно направлено вдоль шатуна АВ из точки В к точке А, и его величина:
![]()
Для ускорений аВА и аВ известно только направление. Первое из них направлено перпендикулярно шатуну АВ, а второе вдоль направляющей ползуна.
Масштабом ускорений называется отношение нормального напряжения ведущего звена в м/с2 к длине отрезка изображающего данное ускорение на плане ускорений в мм.
![]()
Свойства плана ускорений:
- Отрезки планов ускорений, проходящие через полюс, изображают абсолютные ускорения. Направление абсолютных ускорений всегда получается от полюса. В конце векторов абсолютных ускорений принято ставить малую букву той буквы, которой обозначена соответствующая точка на плане механизма;
- Отрезки плана ускорений, соединяющие концы векторов абсолютных ускорений, обозначают относительные ускорения;
- Концы векторов абсолютных ускорений точек механизма жестко связанных между собой на плане ускорений образуют фигуры подобные, сходственно расположенные и повернутые на угол 180- относительно расположения их на плане механизма;
- Постоянные неподвижные точки механизма имеют соответствующие им точки плана ускорений расположенные в полюсе;
18. Силы, действующие в механизмах, и их характеристики.
Все силы, действующие в механизмах, условно подразделяются на:
1. Внешние, действующие на исследуемую систему со стороны внешних систем и совершающие работу над системой. Эти силы в свою очередь подразделяются на:
1) движущие, работа которых положительна (увеличивает энергию системы);
2) сопротивления, работа которых отрицательна (уменьшает энергию системы). Силы сопротивления делятся на:
- силы полезного (технологического) сопротивления - возникающие при выполнении механической системы ее основных функций (выполнение требуемой работы по изменению координат, формы или свойств изделия и т.п.);
- силы трения (диссипативные) - возникающие в месте связи в КП и определяемые условиями физико-механического взаимодействия между звеньями (работа всегда отрицательна);
3) взаимодействия с потенциальными полями (позиционные) - возникают при размещении объекта в потенциальном поле, величина зависит от потенциала точки, в которой размещается тело (работа при перемещении из точки с низким потенциалом в точку с более высоким - положительна; за цикл, т.е. при возврате в исходное положение работа равна нулю). Потенциальное поле - силы тяжести или веса. Существуют электромагнитные, электростатические и другие поля.
2. Внутренние, действующие между звеньями механической системы. Работа этих сил не изменяет энергии системы. В механических системах эти силы называются реакциями в кинематической паре.
3. Расчетные (теоретические) - силы, которые не существуют в реальности, а только используются в различных расчетах с целью их упрощения:
1) силы инерции - для силового расчета подвижных механических систем. При добавлении этих сил к внешним силам, действующим на систему, устанавливается квазистатическое равновесие системы и ее можно рассчитывать, используя уравнения статики (метод кинетостатики).
2) приведенные (обобщенные) силы – силы, совершающие работу по обобщенной координате равную работе соответствующей реальной силы на эквивалентном перемещении точки ее приложения.
Под силами понимаются равнодействующие соответствующих распределенных в месте контакта кинематических пар нагрузок. Все вышесказанное относительно сил распространяется и на моменты сил.
17
20