

2.2. Основные кинематические способы определения движения точки
Определить движение точки значит установить закон, которому подчиняется ее движение, и который позволил бы найти положение точки в пространстве относительно выбранной системы отсчета в любой момент времени. Существует три основных кинематических способа определения движения точки:
векторный, координатный, естественный.
2.2.1.Векторный способ
Пусть точка М (рис. 2.3), движение которой подлежит определению, двигаясь в пространстве относительно некоторой системы отсчета O x y z, описывает траекторию АВ.
Из какой-нибудь точки, неизменно связанной с этой системой отсчета, например, из начала координат О, проведем в точку М радиус-вектор r. Понятно, что при движении точки М вектор r, в общем случае, непрерывно изменяет как свою величину (модуль), так и направление. Следовательно, он является векторной функцией времени , т.е. r = f(t) (2.3)

Это векторное равенство выражает закон движения точки М и называется векторным уравнением ее движения. Оно позволяет для любого момента времени построить вектор r (например, по его проекциям на координатные оси) и, следовательно, найти положение точки М относительно выбранной системы отсчета. Траектория точки М представляет собой годограф ее радиуса-вектора r. Функция (2.3) должна быть непрерывной, однозначной и дважды дифференцируемой.
2.2.2. Координатный способ
Известно, что положение точки в пространстве однозначно определяется тремя ее координатами: х, у, z относительно выбранной системы координат x O y z (рис. 2.3). При движении точки по траектории, в общем случае, непрерывно изменяются с течением времени все три ее координаты. Таким образом, движение точки описывается уравнениями:
X=f1 (t), У'= f2 (t). Z=f3 (t). (2-4)
Подставив в эти уравнения вместо t любое значение, можно найти положение точки в пространстве в соответствующий момент времени. Следовательно, уравнения (2.4) определяют движение точки относительно выбранной системы отсчета. Эти уравнения называются уравнениями движения точки в координатной форме. Функции (2.4) должны быть непрерывными, однозначными и, как это будет показано ниже, дифференцируемыми, по крайней мере, дважды.
Если точка совершает плоское движение, т.е. движется в одной плоскости, то, совместив с плоскостью ее движения одну из координатных плоскостей, например, плоскость х О у, мы обратим в тождество третье уравнение системы (2.4). Таким образом, плоское движение точки определяется двумя уравнениями этой системы. Прямолинейное движение точки определяется одним из этих уравнений, т.к. направив одну из координатных осей вдоль траектории точки, можно обратить в тождества два уравнения системы (2.4).
2.2.3. Естественный способ
Пусть некоторая точка, совершая движение по траектории KL (рис. 2.4) в момент t занимает положение М. Если точка М движется относительно выбранного тела отсчета, то траектория KL неизменно связана с этим телом. Будем считать, что траектория точки М нам задана. Возьмем на этой траектории неизменно связанную с ней точку А (а следовательно, и с телом отсчета).
Т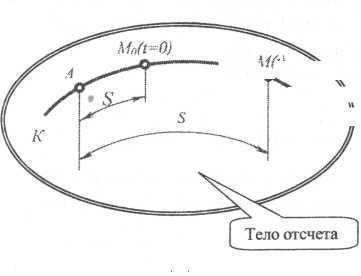 огда
положение рассматриваемой
точки М
на
ее траектории
будет определено, если задана ее дуговая
координата S,
отсчитывается вдоль траектории от точки
А,
называемой
началом дуговых координат. Дуговая
координата является величиной
алгебраической. Она может быть
положительной или отрицательной в
зависимости от того, с какой стороны от
точки
А
расположена
точка М.
Правило
знаков для дуговой координаты должно
быть выбрано предварительно.
огда
положение рассматриваемой
точки М
на
ее траектории
будет определено, если задана ее дуговая
координата S,
отсчитывается вдоль траектории от точки
А,
называемой
началом дуговых координат. Дуговая
координата является величиной
алгебраической. Она может быть
положительной или отрицательной в
зависимости от того, с какой стороны от
точки
А
расположена
точка М.
Правило
знаков для дуговой координаты должно
быть выбрано предварительно.
Не следует дуговую координату точки смешивать с длиной пройденного ей пути. Пройденный путь всегда положителен и при движении точки всегда возрастает, независимо от направления движения.
Дуговая координата S при движении точки, в общем случае, непрерывно изменяется с течением времени. Она является непрерывной, однозначной и дважды дифференцируемой функцией времени, т.е. S= f (t). (2.5)
Уравнение такого вида определяет движение точки по ее траектории, т.к. подставив в него любое значение времени t, можно определить соответствующее алгебраическое значение дуговой координаты S и, таким образом, определяется положение точки на ее траектории в соответствующий момент времени. В этом случае системой отсчета является сама траектория вместе с началом А дуговых координат. Уравнение (2.5) называется уравнением движения точки по ее траектории или уравнением ее движения в естественной форме. Заметим, что это уравнение определяет движение точки только в том случае, если задана ее траектория, выбрано начало дуговых координат и правило знаков для дуговой координаты.
Положение М0 занимаемой точкой М в начальный момент, называется начальным ее положением. Дуговая координата So начального положения точки называется начальной дуговой координатой. Она определяется из уравнения (2.5) подстановкой в него t = 0, т.е.
So =f(0). (2.6)