

3.2. Метод кинетостатики
Представим себе материальную точку массой т, движущуюся с ускорением а, под действием системы активных и реактивных сил, равнодействующая которых равна R.
та = R = ΣP1
Перенеся вектор, стоящий в левой части уравнения в правую, получим сумму векторов, равную нулю, т.е. уравнение равновесия:
- та + R = 0 или - та + Σ P1 = 0.
Слагаемое - та обозначается буквой РИ и называется силой инерции, т.е.
РИ = -та .
Сила инерции есть вектор, равный произведению массы точки на ее ускорение и направленной в сторону, противоположную ускорению. Тогда
Pt + Ри = 0 или R + Ри = 0.
Это равенство, называемое принципом Даламбера, формулируется так: активные и реактивные силы, действующие на материальную точку, вместе с силами инерции образуют систему взаимно уравновешенных сил, удовлетворяющую всем условиям равновесия.
Применение принципа Даламбера позволяет решать задачи динамики с использованием уравнений равновесия. Такой прием решения задач называется методом кинетостатики.
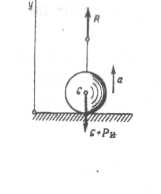
РИ = та = Gа / g.
При ускоренном движении направления ускорения а и скорости V совпадают и сила инерции Рu направлена в сторону, противоположную движению.
При замедленном движении, когда ускорение а направлено в сторону, противоположную скорости V, сила инерции Р# действует по направлению движения, т.е. совпадает со скоростью.
При криволинейном движении точка А движется по кривой траектории и неравномерно. В этом случае полное ускорение а равно векторной сумме касательного а, и нормального а„ ускорений. Каждому ускорению соответствует своя сила инерции.
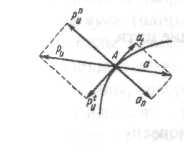
Р'И= таt = Gа t / g
Нормальная сила инерции равна произведению массы точки на нормальное ускорение и направлена противоположно ему, т.е. Ри = таn =G*аn / g
Полная сила инерции равна геометрической сумме касательной и нормальной сил инерции, т.е.
P u = Р'И + Р"И
Модуль полной силы инерции находится аналогично полному ускорению, т.е.
Ри =√( Р'И)2 +( Р"и )2 = G / g √ at 2 + an2
3.3. Работа при поступательном движении
Работа постоянной силы на прямолинейном участке пути.
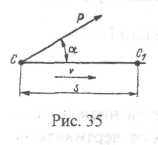
Рассмотрим материальную точку С, к которой в числе других приложена сила Р постоянная по величине и направлению. За некоторый промежуток времени t точка С переместилась в положение С по прямолинейной траектории на расстояние S. Сдвигать точку С может только горизонтальная составляющая R от силы Р, т.е. R = P cos a,
где a - угол между направлениями силы и перемещения.
Тогда действие силы Р на пути S можно определить произведением R ■ s.
Это произведение обозначается буквой А и называется работой. Следовательно,
A = Ps cos(P, S) = P s cosa,
т. е. работа силы равна произведению ее модуля на путь и на косинус угла между направлением силы и направлением перемещения.
Работа является скалярной величиной*. Угол а может меняться в пределах от 0 до 180°.
Если направление силы и направление перемещения составляет острый угол (а < 90°), работа положительна (например, при движении тела вниз работа силы тяжести положительна). Если направление силы и направление перемещения противоположны (а > 90°), работа отрицательна (например, при подъеме тела вверх работа силы тяжести отрицательна). Когда направление силы и направление перемещения перпендикулярны (а = 90°), работа равна нулю (например, при движении тела по горизонтальной плоскости работа силы тяжести равна нулю). Когда направление силы совпадает с направлением перемещения (а = 0),А= Ps.
Силы, совершающие положительную работу, называются движущими силами; силы, совершающие отрицательную работу, называются силами сопротивления.
Единицей работы является:
[А] = [Р] ■ [s] = сила х длина = ньютон х метр = джоуль (Дж).
Джоуль — это работа силы в oдин ньютон на совпадающем с ней по направлению перемещении в один метр.
*Скалярная величина (от лат. scalaris — ступенчатый) определяется только своим значением, в отличие от вектора, который кроме значения имеет направление. К скалярным величинам относятся длина, площадь, время, температур