

4.6. Сложные виды деформаций
При работе машин и механизмов их детали подвергаются различным видам деформаций: растяжению, сжатию, изгибу, кручению и др. В результате в деталях возникают напряжения растяжения (сжатия), изгиба, кручения и т. д. Рассмотрим некоторые наиболее распространенные виды деформаций.
Изгиб и растяжение (сжатие). Пусть на брус длиной / (рис. 75) постоянного поперечного сечения F, защемленный одним концом в точке В на свободном его конце действует произвольно направленная сила Р, приложенная в центре тяжести сечения.
Разложив силу Р на составляющие сил Рх, Ру и Рг, получим сочетание деформаций растяжения и поперечного изгиба в двух взаимно перпендикулярных плоскостях. Касательными напряжениями изгиба в дальнейшем будем пренебрегать.
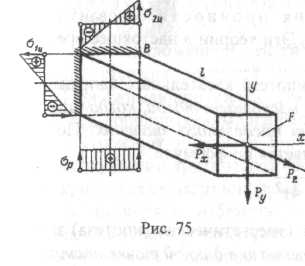
Максимальные нормальные напряжения в опасном сечении (заделки), применив принцип независимости действия сил, запишутся в следующем виде
σр = Рz / F; σ1п = Ру l / Wx
σ2g = Рx l / Wy
Максимальные суммарные напряжения возникают в точке В и будут равны
σmax =( Рz / F)+( Ру l / Wx ) + (Рx l / Wy )
Эпюры нормальных напряжений растяжения и изгиба показаны на рис. 75. Деформации растяжения и изгиба встречаются, например, у крюков грузоподъемных кранов, регулировочных винтов раскосов навесок тракторов.
Гипотезы прочности. До сих пор были рассмотрены случаи сочетания основных деформаций только при нормальных напряжениях, которые в каждой точке можно складывать алгебраически. Однако на практике большое значение имеют случаи сочетания основных деформаций, когда в поперечных сечениях возникают, кроме нормальных, и касательные напряжения, которые распределены неравномерно и по разным законам. В этих случаях опытное определение прочности невозможно и при оценке прочности детали основываются на механических характеристиках материала, полученных из диаграммы растяжения.
Для напряженного состояния при сочетании основных деформаций определение опасных напряжений опытным путем невозможно из-за трудности постановки опытов. В связи с этим при решении таких задач основываются на некоторых гипотезах о том, какой фактор вызывает появление опасного состояния.
На основании гипотез прочности определяют эквивалентное напряжение, которое сопоставляют с напряжением при осевом нагружении. В соответствии с условием прочности эквивалентное напряжение не должно превышать допускаемого напряжения для материала, т.е.
σэкв = [σ p]
Гипотезы прочности для определения эквивалентных напряжений формулируются следующим образом.
Первая теория прочности основана на гипотезе наибольших нормальных напряжений. Вторая теория прочности основана на гипотезе наибольших линейных деформаций. Эти теории в настоящее время не применяются.
Третья теория прочности (гипотеза касательных напряжений) гласит так: опасное состояние материала наступает тогда, когда наибольшие касательные напряжения достигают предельного значения. По этой теории эквивалентное напряжение определяется по формуле
σэкв = √ σ2 + 4 τ 2
Четвертая теория прочности (энергетическая гипотеза) звучит следующим образом: опасное стояние материала в данной точке наступает тогда, когда удельная потенциальная энергия формоизменения для этой точки достигает предельной величины. Формула для определения эквивалентных напряжений имеет вид σэкв = √ σ2 + 3 τ 2
В этих формулах σ и τ есть нормальные и касательные напряжения.
Изгиб и кручение. Сочетание деформаций изгиба и кручения испытывает большинство валов под действием передаваемых или вращающих и изгибающих моментов. При этом в поперечном сечении вала возникают нормальные и касательные напряжения. Максимальные нормальные и касательные напряжения для круглых валов рассчитываются по формулам:
σ = Мн / W ; τ = Мк / W р , где
W = 0.1 d 3 ; Wр = 0.2 d 3 ;