

-
Волны
-
Движение связанных систем
-
П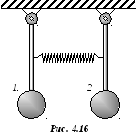 редположим,
у нас есть два одинаковых маятника,
упруго связанных друг с другом (рис.
4.16). Без связи такие маятники колебались
бы по уже известным нам законам. Наличие
связи приводит к передаче энергии от
одного маятника к другому. Выведем из
положения равновесия маятник 1 и
предоставим систему самой себе. Первый
маятник, начав собственные колебания,
посредством связи действует вынуждающей
силой на второй, приводя его в вынужденные
колебания (в резонансном режиме –
собственные частоты маятников одинаковы).
Амплитуда колебаний маятника 2
будет расти до максимальной, маятника
1 – уменьшаться до нуля (первый все
время опережает второй по фазе, образно
говоря, ведет его за собой; второй в
свою очередь тормозит первый до
остановки).
редположим,
у нас есть два одинаковых маятника,
упруго связанных друг с другом (рис.
4.16). Без связи такие маятники колебались
бы по уже известным нам законам. Наличие
связи приводит к передаче энергии от
одного маятника к другому. Выведем из
положения равновесия маятник 1 и
предоставим систему самой себе. Первый
маятник, начав собственные колебания,
посредством связи действует вынуждающей
силой на второй, приводя его в вынужденные
колебания (в резонансном режиме –
собственные частоты маятников одинаковы).
Амплитуда колебаний маятника 2
будет расти до максимальной, маятника
1 – уменьшаться до нуля (первый все
время опережает второй по фазе, образно
говоря, ведет его за собой; второй в
свою очередь тормозит первый до
остановки).
В этот момент маятники меняются ролями: второй становится раскачивающим, действует вынуждающей силой на первый, который совершает вынужденные колебания и, в свою очередь, получает энергию от второго и т.д. Если пренебречь затуханием, энергия в равных количествах будет переходить от первого маятника ко второму и обратно. Легко заметить, что чем сильнее связь (более упругая пружина, связывающая маятники) и меньше масса маятников, тем быстрее идет процесс перекачки энергии от одного маятника к другому.
При достаточно малой массе и сильной связи процесс передачи энергии будет закончен за время, которое гораздо меньше периода колебаний. Тогда процесса колебаний на будет, а некоторое движение одного маятника будет без изменения формы передано другому (маятники будут совершать лишь малую часть полного колебания).
Ничего принципиально не изменится в нашем рассмотрении, если вместо двух маятников система будет состоять из большего числа маятников, упруго связанных друг с другом. Возмущение любой формы будет без изменения передано всем последующим точкам до конца цепочки, затем обратно и т.д. Мы здесь имеем два вида движения: уже известное нам колебательное движение одной точки и распространение возмущений вдоль цепочки таких точек. Скорость распространения возмущения тем больше, чем сильнее упругая связь точек и чем меньше их масса.
-
Упругие волны
П усть
имеется совокупность колеблющихся
точек – вибраторов, связанных упругими
связями (рис. 4.17).
усть
имеется совокупность колеблющихся
точек – вибраторов, связанных упругими
связями (рис. 4.17).
При достаточно малой массе и сильной связи вибраторов, как мы сказали, вся энергия в той же форме переходит к другой точке и первая останавливается. Вся цепь связанных вибраторов с некоторым запаздыванием повторяет движение первого. Возмущение, без искажения формы с конечной скоростью распространяющееся вдоль цепочки упруго связанных вибраторов, называется упругой волной.
Устремим массу каждого шарика к нулю, а их число – к бесконечности. Получается непрерывная упругая среда. В такой среде колебания (или одиночное возмущение), начавшиеся в одной точке, не остаются локализованными в этой точке, а благодаря упругим свойствам распространяются во всех направлениях в виде упругих волн. Среду, в которой распространяются волны, называют волновым полем.
Рассмотрим более подробно передачу одного возмущения (пусть точки могут двигаться только перпендикулярно прямой 1 – 5, рис. 4.18). Выведем из положения равновесия точку 1 (рис. 4.18, а) и предоставим систему самой себе. Упругие свойства в положении а тормозят точку 1 и ускоряют (выводя из положения равновесия) точку 2. Точка 1 под действием этих сил останавливается и начинает ускоренно двигаться к положению равновесия. Точка 2 повторяет ее движение с запаздыванием, она разгоняется, пока есть составляющая сил упругости, направленная от положения равновесия; затем силы упругости начинают тормозить и точку 1, движущуюся к положению равновесия, и точку 2, движущуюся от своего положения равновесия; в то же время ускоренно от положения равновесия начинает двигаться точка 3 (рис. 4.18, б). Точка 1 теперь движется к положению равновесия замедлено, точка 2 останавливается и начинает ускоренно двигаться к положению равновесия.
К огда
точка 1 приходит в положение
равновесия, ее скорость равна нулю
(рис. 4.18, в). Точка 2, двигавшаяся
к положению равновесия ускоренно,
движется с меньшим ускорением, затем
замедленно; точка 3 начинает
тормозиться, затем останавливается и
будет ускоренно возвращаться; точка 4
начинает ускоренное движение от
положения равновесия. В следующем
положении (рис. 4.18, г) точка 2
тоже (вслед за точкой 1) остановилась;
точка 3 замедляет свое движение к
положению равновесия; точка 4
тормозится перед началом возвращения
к положению равновесия; точка 5
ускоренно выводится из своего положения
равновесия и т.д.
огда
точка 1 приходит в положение
равновесия, ее скорость равна нулю
(рис. 4.18, в). Точка 2, двигавшаяся
к положению равновесия ускоренно,
движется с меньшим ускорением, затем
замедленно; точка 3 начинает
тормозиться, затем останавливается и
будет ускоренно возвращаться; точка 4
начинает ускоренное движение от
положения равновесия. В следующем
положении (рис. 4.18, г) точка 2
тоже (вслед за точкой 1) остановилась;
точка 3 замедляет свое движение к
положению равновесия; точка 4
тормозится перед началом возвращения
к положению равновесия; точка 5
ускоренно выводится из своего положения
равновесия и т.д.
Различают волны поперечные (смещение перпендикулярно направлению распространения волны) и продольные (смещение параллельно направлению распространения волны). Такие волны бывают в изотропных средах. Обычно встречаются комбинации поперечных и продольных волн. Виды упругих волн соответствуют видам деформации, поперечные волны связаны с деформацией сдвига, продольные – с деформацией сжатия (растяжения).
-
О
 пределите
скорость распространения упругой
волны, например сжатия в однородной
среде.
пределите
скорость распространения упругой
волны, например сжатия в однородной
среде.
Аналогично распространяется в упругой среде произвольная комбинация возмущений, создаваемых задающим генератором.
Мы ограничимся случаем гармонического источника волн – генератора, последовательность возмущения от которого представляет собой косинусоиду. Назовем фронтом волны поверхность, отделяющую еще невозбужденную часть среды от уже возбужденной. Волновой поверхностью называют множество точек, имеющих одинаковые фазы колебаний. Для изотропной среды фронт является одной из волновых поверхностей. По форме этой поверхности (фронта) различают волны плоские, сферические и т.п.
Луч – линия, нормальная ко всем фронтам, в направлении которой переносится энергия (следовательно, возможны лучи криволинейные).