

1.7 Типовые динамические звенья. Простейшие звенья. Звенья первого порядка
Для исследования процессов в реальных системах пользуются идеализированными схемами, которые точно описываются математически и приближенно характеризуют реальные звенья систем в заданном диапазоне частот сигналов.
В теории автоматического управления вводится понятие типовых звеньев, передаточная функция которых только в определенном частотном диапазоне соответствует реальным звеньям системы управления.
Рассматривая характеристики звеньев вне зависимости от их назначения, физического принципа действия, мощности и скорости передаваемых сигналов, можно выделить ряд типовых звеньев, описываемых обыкновенными линейными дифференциальными уравнениями первого и второго порядка:
-
простейшие: пропорциональные, интегрирующие и дифференцирующие звенья;
-
звенья первого порядка: инерционные, инерционно-дифференцирующие, форсирующие и инерционно-форсирующие;
-
колебательные звенья второго порядка.
Все типовые звенья имеют передаточную функцию, которая представляет собой рациональную дробь
![]()
причем
нули и полюсы функции
![]() ,
соответствующие
уравнениям
,
соответствующие
уравнениям
![]() и
и
![]() ,
лежат в левой полуплоскости р
или на ее
границе, совпадающей с мнимой осью.
,
лежат в левой полуплоскости р
или на ее
границе, совпадающей с мнимой осью.
Более сложные линейные звенья могут быть сведены к соединению типовых звеньев.
При отнесении реального звена к какому-либо типовому следует оговаривать диапазон частот, при котором рассматриваются характеристики. Выход за пределы этого диапазона может привести к необходимости учета дополнительных параметров и усложнению математического описания звена.
Простейшие звенья
Пропорциональное звено. Самым простым является звено, выходная величина которого прямо пропорциональна входной величине. Уравнение такого звена
![]() (1.7.1)
(1.7.1)
где k — коэффициент усиления звена.
Примерами такого звена (рисунок 1.7.1) являются: делитель напряжения (а), усилитель постоянного тока (б), рычажная передача (в), редукторная передача (г) и др.
Предполагается, что передача сигнала от входа к выходу производится мгновенно без какой-либо инерции. Поэтому, пропорциональные звенья называются безынерционными.
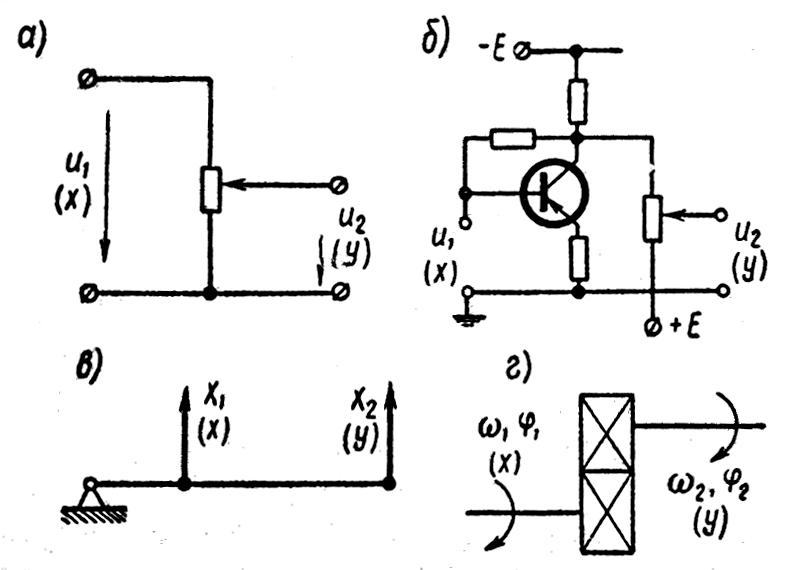
Рисунок 1.7.1 – Примеры пропорционального звена
Если на вход пропорционального звена подать синусоидальный сигнал
![]()
то на выходе появится сигнал
![]()
где
![]()
В комплексной форме
![]()
или
![]() (1.7.2)
(1.7.2)
и комплексный коэффициент усиления
![]() (1.7.3)
(1.7.3)
Годограф
комплексного коэффициента усиления
![]() при
при
![]() имеет вид точки, сдвинутой на расстояние
k
от нуля по
вещественной оси (рисунок 1.7.2, а).
имеет вид точки, сдвинутой на расстояние
k
от нуля по
вещественной оси (рисунок 1.7.2, а).
Принятое описание
связи между входом и выходом соответствует
идеальному звену, а для реального звена
справедливо только при частотах,
меньших определенной максимальной
величины
![]() .
.

Рисунок 1.7.2 – Характеристики пропорционального звена
При
возрастании ω
до бесконечности
коэффициент усиления
любого реального звена снижается до
нуля и годограф
коэффициента усиления при
![]() носит характер графика, показанного
на рисунке 1.7.2, а пунктиром. Однако
в системах автоматического
управления обычно рассматривается
диапазон сравнительно
низких частот, для которых
носит характер графика, показанного
на рисунке 1.7.2, а пунктиром. Однако
в системах автоматического
управления обычно рассматривается
диапазон сравнительно
низких частот, для которых
![]() и, все рассмотренные устройства
могут быть отнесены к категории
пропорциональных (безынерционных)
звеньев, а годограф коэффициента
усиления имеет вид
точки k.
и, все рассмотренные устройства
могут быть отнесены к категории
пропорциональных (безынерционных)
звеньев, а годограф коэффициента
усиления имеет вид
точки k.
Соответствующие амплитудно-частотные и фазочастотные характеристики показаны на рис. 1.7.2, б и в.
Переходя от коэффициента усиления к передаточной функции
![]() (1.7.4)
(1.7.4)
а затем к переходной и весовой функциям, получаем
![]() (1.7.5)
(1.7.5)
и
![]() (1.7.6)
(1.7.6)
Графическое изображение переходной и весовой функций пропорционального звена показано на рисунке 1.7.2, г и д. Обе эти функции соответствуют идеальному пропорциональному звену. Реальные звенья, схемы которых изображены на рисунке 1.7.1, имеют характеристики, только приближенно описываемые этими графиками. Отклонение реальных характеристик от идеальных на графиках показано пунктиром (см. рисунок 1.7.2).
Интегрирующее звено. Существует ряд звеньев, в которых выходная величина пропорциональна или равна интегралу по времени от входной величины
![]() (1.7.7)
(1.7.7)
где k — некоторый коэффициент пропорциональности.
Такие звенья называются интегрирующими.
Примерами реальных элементов, эквивалентные схемы которых сводятся к интегрирующему звену, являются: электрическая емкость (рисунок 1.7.3, д), индуктивность (б), вращающийся вал (в), гидравлический резервуар (г).
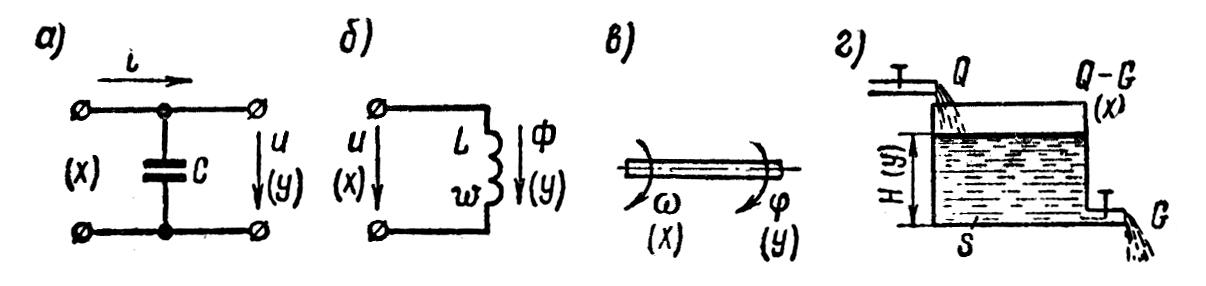
Рисунок 1.7.3 – Примеры интегрирующего звена
Если
на вход интегрирующего звена подать
синусоидальный сигнал
![]() ,
то из уравнения (1.7.7) непосредственно
следует, что
,
то из уравнения (1.7.7) непосредственно
следует, что
![]() (1.7.8)
(1.7.8)
или
![]()
и
![]() (1.7.9)
(1.7.9)
Комплексный коэффициент усиления интегрирующего звена
![]() (1.7.10)
(1.7.10)
Частотный годограф (а) и частотные характеристики (б) интегрирующего звена показаны на рисунке 1.7.4.
Переходя от коэффициента усиления к передаточной функции
![]() (1.7.11)
(1.7.11)
а затем к переходной и весовой функциям, получаем
![]() (1.7.12)
(1.7.12)
и
![]() (1.7.13)
(1.7.13)
Переходная и весовая функция интегрирующего звена представлены на рисунке 1.7.4, в и г.
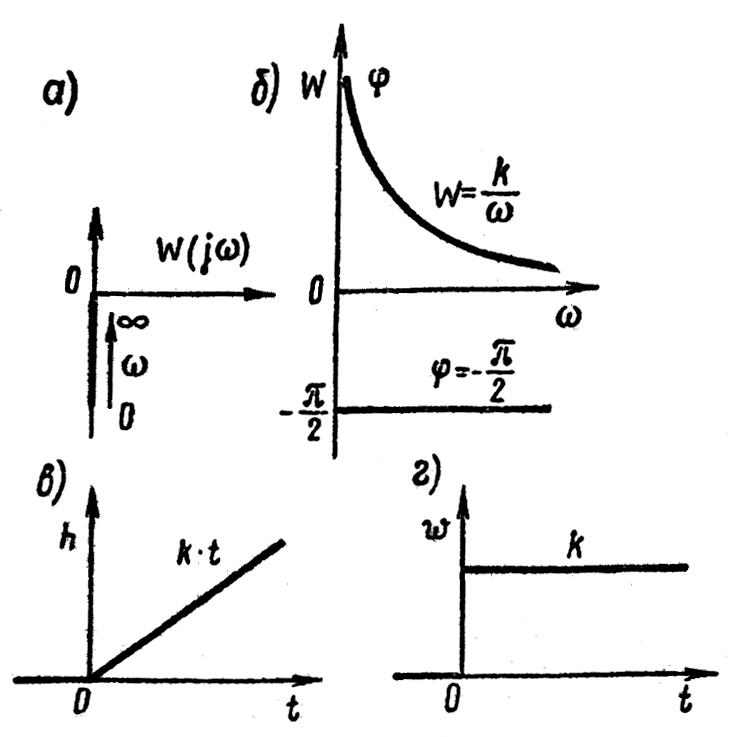
Рисунок 1.7.4 – Характеристики интегрирующего звена
Дифференцирующее звено. Не существует такого реального элемента, в котором на выходе точно воспроизводилась бы производная от любого входного сигнала. Однако при составлении структурной схемы системы ее можно так разделить на звенья, что введение понятия дифференцирующего звена будет вполне обосновано.
В этом случае выходная величина у зависит от входной величины х как производная
![]() (1.7.14)
(1.7.14)
где k — коэффициент пропорциональности.
Примерами таких звеньев могут служить электрическая ёмкость, индуктивность (рисунок 1.7.5).
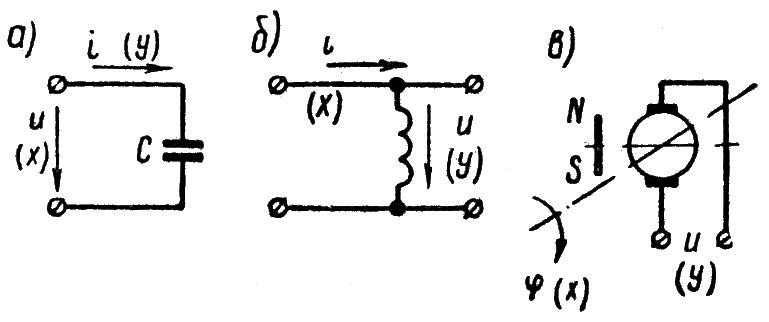
Рисунок 1.7.5 – Примеры дифференцирующего звена
Комплексный коэффициент усиления
![]() (1.7.15)
(1.7.15)
Все частотные характеристики звена представлены на рисунке 1.7.6, а, б.
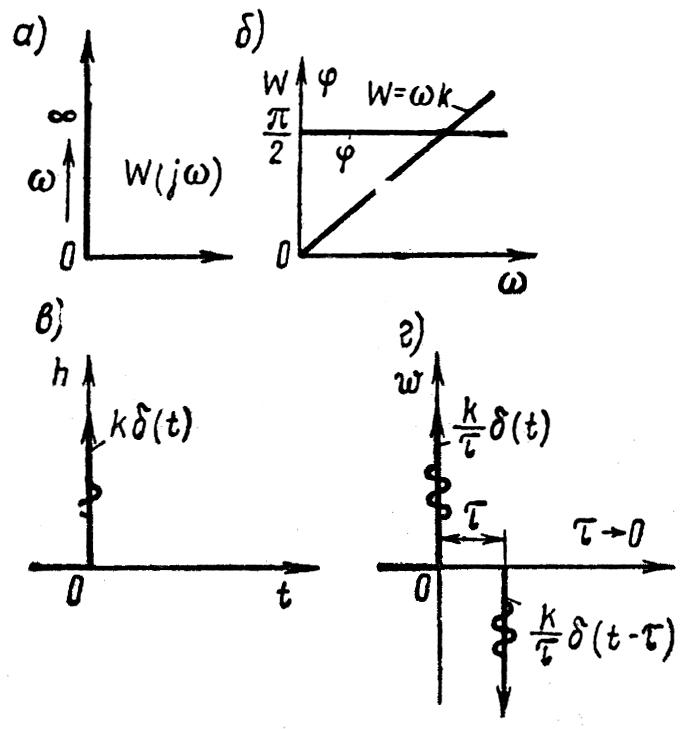
Рисунок 1.7.6 – Характеристики дифференцирующего звена
Передаточная функция дифференцирующего звена
![]()
![]() (1.7.16)
(1.7.16)
а, соответственно, переходная и весовая функции
![]() (1.7.17)
(1.7.17)
и
![]() (1.7.18)
(1.7.18)
Переходная и весовая функция дифференцирующего звена представлены на рисунке 1.7.6, в и г. Производная от δ-функции или δ-функция второго порядка δ' на рисунке 1.7.6, г изображена в виде двух импульсов второго порядка, интервал между которыми τ стремится к нулю.