

Звенья первого порядка
Инерционное звено. Одним из самых распространенных звеньев системы автоматического управления является инерционное звено. Оно описывается уравнением
![]() (1.7.19)
(1.7.19)
где k и Т — соответственно коэффициент усиления и постоянная времени звена.
Примерами инерционного звена (рисунок 1.7.7) могут служить RC- и RL-цепочки.
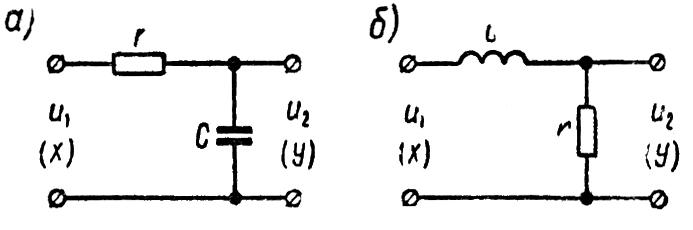
Рисунок 1.7.7 – Примеры инерционного звена
Комплексный коэффициент усиления
![]() (1.7.20)
(1.7.20)
Частотные характеристики для этой функции показаны на рисунке 1.7.8, а, б. Здесь
![]() (1.7.21)
(1.7.21)
а
![]() (1.7.22)
(1.7.22)
Наряду с
характеристикой
![]() иногда бывает удобно пользоваться
инверсной характеристикой
иногда бывает удобно пользоваться
инверсной характеристикой
![]() .
Для инерционного звена такая характеристика
показана на рисунке 1.7.8, б. Если
характеристика
.
Для инерционного звена такая характеристика
показана на рисунке 1.7.8, б. Если
характеристика
![]() имеет вид типичной круговой диаграммы,
лежащей в четвертом квадранте и
опирающейся на диаметр
имеет вид типичной круговой диаграммы,
лежащей в четвертом квадранте и
опирающейся на диаметр
![]() ,
то инверсная характеристика имеет вид
прямой, уходящей из точки
,
то инверсная характеристика имеет вид
прямой, уходящей из точки
![]() в бесконечность параллельно мнимой
оси.
в бесконечность параллельно мнимой
оси.
Передаточная функция инерционного звена согласно (1.7.20)
![]() (1.7.23)
(1.7.23)
Соответственно переходная функция
![]() (1.7.24)
(1.7.24)
Весовая функция
![]() (1.7.25)
(1.7.25)
Графики переходной и весовой функций инерционного звена показаны на рисунке 1.7.8, г и д.

Рисунок 1.7.8 – Характеристики инерционного звена
Форсирующее звено. Звено, описываемое дифференциальным уравнением
![]() (1.7.26)
(1.7.26)
называется форсирующим звеном.
Такое звено получается в результате различных параллельных соединений пропорционального и дифференцирующего или инерционного звеньев.
Для этого звена получаем:
![]() (1.7.27)
(1.7.27)
![]() (1.7.28)
(1.7.28)
![]() (1.7.29)
(1.7.29)
Частотные характеристики форсирующего звена показаны на рисунке 1.7.9. Как видно из графика, прямая амплитудно-фазовая характеристика форсирующего звена аналогична инверсной характеристике инерционного звена, а инверсная его характеристика соответствует прямой характеристике инерционного звена.
Это соответственно отражается и на амплитудных и фазовых характеристиках.
Передаточная функция форсирующего звена
![]() (1.7.30)
(1.7.30)
и может быть представлена в виде суммы передаточных функций пропорционального и дифференцирующего звеньев. Переходная и весовая функции форсирующего звена имеют вид суммы соответствующих функций простейших звеньев:
![]() (1.7.31)
(1.7.31)
![]() (1.7.32)
(1.7.32)
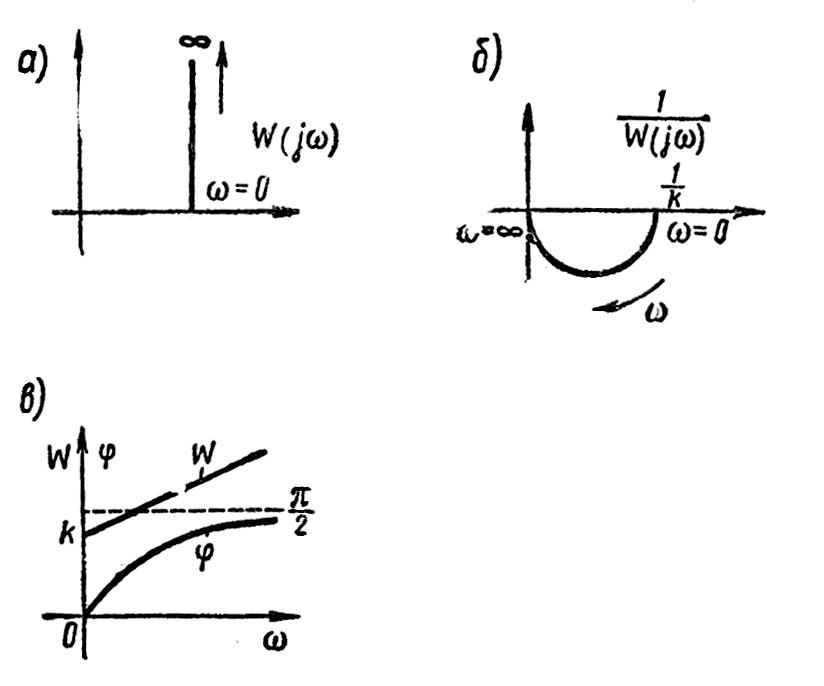
Рисунок 1.7.9 – Характеристики форсирующего звена
Инерционно-дифференцирующее звено. Звено, описываемое дифференциальным уравнением
![]() (1.7.33)
(1.7.33)
называется реальным дифференцирующим, или инерционно-дифференцирующим звеном.
Примерами такого звена являются механическая система с гибкой гидравлической связью и четырехполюсники, содержащие соответствующим образом включенные активные и реактивные сопротивления (рисунок 1.7.10).
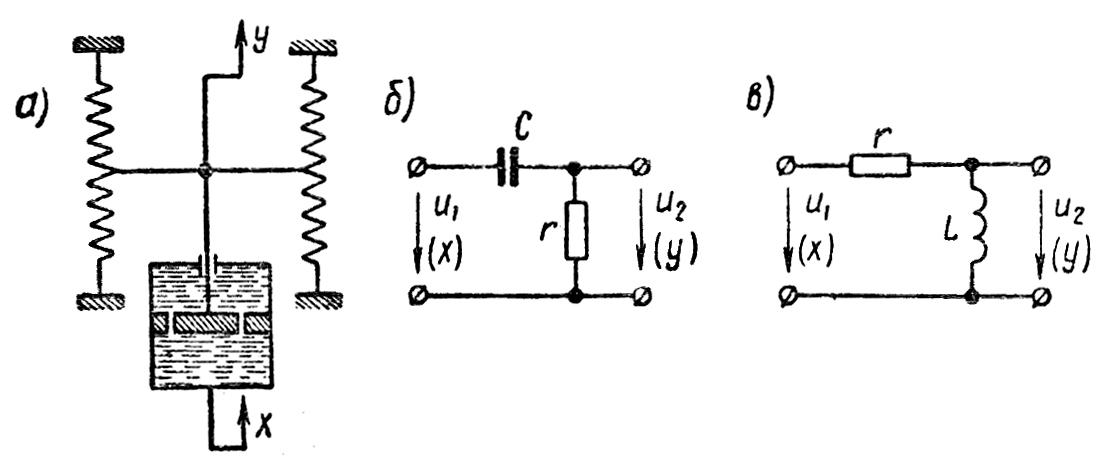
Рисунок 1.7.10 – Примеры инерционно-дифференцирующего звена
Комплексный коэффициент усиления
![]() (1.7.34)
(1.7.34)
Частотные характеристики для этой функции показаны на рисунке 1.7.11, а, б, в:
![]() (1.7.35)
(1.7.35)
![]() (1.7.36)
(1.7.36)
Передаточная функция инерционно-дифференцирующего звена согласно (1.7.34)
![]() (1.7.37)
(1.7.37)
Переходная функция:
![]() (1.7.38)
(1.7.38)
Весовая функция:
![]() (1.7.39)
(1.7.39)
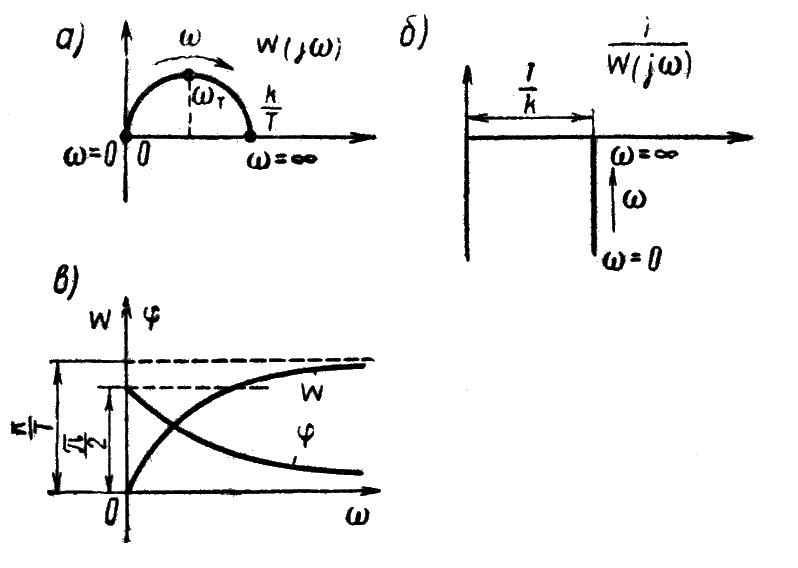
Рисунок 1.7.11 – Характеристики инерционно-дифференцирующего звена
Инерционно-форсирующее звено. Инерционно-форсирующим (или упругим) называется звено, описываемое дифференциальным уравнением следующего вида
![]() (1.7.40)
(1.7.40)
Существенным
параметром инерционно-форсирующего
звена является коэффициент
![]() .
Если
.
Если
![]() ,
то звено по своим свойствам приближается
к интегрирующему и инерционному
звеньям. Если же
,
то звено по своим свойствам приближается
к интегрирующему и инерционному
звеньям. Если же
![]() ,
то звено — ближе к дифференцирующему
и инерционно-дифференцирующему
звеньям.
,
то звено — ближе к дифференцирующему
и инерционно-дифференцирующему
звеньям.
Комплексный коэффициент усиления инерционно-форсирующего звена
![]() (1.7.41)
(1.7.41)
а передаточная функция
![]() (1.7.42)
(1.7.42)
На рисунке 1.7.12
построены частотные характеристики
при
![]() (а, в, д) и
(а, в, д) и
![]() (б, г, е). Характеристики
построены для
нормированных значений
(б, г, е). Характеристики
построены для
нормированных значений
![]()
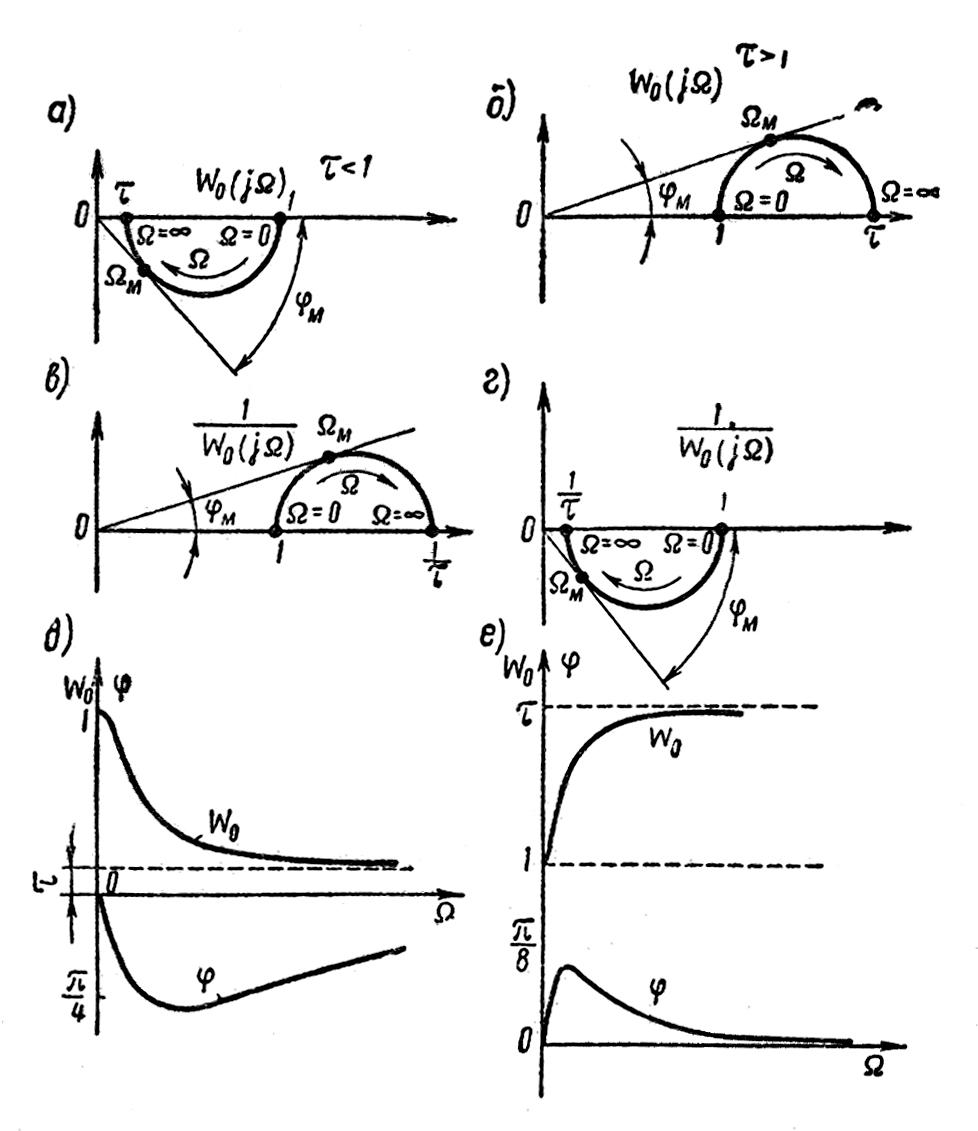
Рисунок 1.7.12 – Характеристики инерционно-форсирующего звена
в
зависимости от относительной безразмерной
частоты
![]() .
Здесь
.
Здесь
![]() (1.7.43)
(1.7.43)
![]() (1.7.44)
(1.7.44)
![]() (1.7.45)
(1.7.45)
Переходная функция определяется как
![]() (1.7.46)
(1.7.46)
и, соответственно,
![]() (1.7.47)
(1.7.47)
Переходные и
весовые функции для инерционно-форсирующих
звеньев показаны на рисунке 1.7.13 (при
![]() (а и в); при
(а и в); при
![]() (б и г)).
(б и г)).

Рисунок 1.7.13 – Переходная и весовая функция инерционно-форсирующего звена