

3.2. Колебательное движение
3.2.1. Свободные колебания материальной точки
При перемещении точки М вдоль оси
Ох сила упругости
![]() направлена к положению равновесия О
(рис.3.5) и ее проекция
направлена к положению равновесия О
(рис.3.5) и ее проекция
![]() ,
где с –
жесткость подвески точки М,
Н/м (здесь
знак минус показывает, что
,
где с –
жесткость подвески точки М,
Н/м (здесь
знак минус показывает, что
![]() направлена против смещения х).
Дифференциальное уравнение свободных
колебаний (без сопротивления) имеет вид
направлена против смещения х).
Дифференциальное уравнение свободных
колебаний (без сопротивления) имеет вид
![]()
или
![]() .
.
Его решение в общем виде
![]()
где
![]() – круговая частота свободных колебаний,
с-1.
– круговая частота свободных колебаний,
с-1.
Постоянные интегрирования можно
определить из начальных условий: при
![]() Тогда
Тогда
![]() (3.1)
(3.1)
Другая форма решения уравнения свободных колебаний имеет вид
![]()
где а – амплитуда колебаний; – начальная фаза,
![]() .
.
![]() м
и груз опущен без начальной скорости.
Найти закон колебаний, отсчитывая
координату х от положения статического
равновесия груза. Найти также наибольшее
значение силы упругости пружины
м
и груз опущен без начальной скорости.
Найти закон колебаний, отсчитывая
координату х от положения статического
равновесия груза. Найти также наибольшее
значение силы упругости пружины
![]() при колебаниях.
при колебаниях.
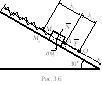
Решение. На рис.3.6 показаны
силы, действующие на груз М, а также
О – начало отсчета координаты х,
А – положение недеформированной
пружины,
![]() начальное
положение груза, причем
начальное
положение груза, причем
![]() статическая
деформация пружины,
статическая
деформация пружины,
![]() начальная деформация. Проекция силы
упругости
начальная деформация. Проекция силы
упругости
![]() и дифференциальное уравнение движения
можно представить в виде
и дифференциальное уравнение движения
можно представить в виде
![]() (3.2)
(3.2)
В положении статического равновесия
![]() поэтому
поэтому
![]() м
м
(здесь принято
![]() м/с2).
Теперь уравнение движения принимает
классический вид (3.2).
м/с2).
Теперь уравнение движения принимает
классический вид (3.2).
Круговая частота и период колебаний соответственно
![]() с.
с.
Начальная координата груза
![]() м.
Поскольку
м.
Поскольку
![]() по формуле (3.1) находим закон колебаний:
по формуле (3.1) находим закон колебаний:
![]() м.
Амплитуда колебаний
м.
Амплитуда колебаний
![]() м.
Максимального значения сила упругости
пружины достигает при ее максимальной
деформации, когда груз отклонится вниз
на величину
м.
Максимального значения сила упругости
пружины достигает при ее максимальной
деформации, когда груз отклонится вниз
на величину
![]() при этом максимальная деформация
при этом максимальная деформация
![]() и соответственно
и соответственно
![]() Н.
Н.
Задача 3.22. Груз массой 98 г подвешен к недеформированной пружине и отпущен без толчка. Для деформации пружины на 1 см к ней следует приложить силу, равную 0,141 Н. Найти уравнение колебаний, отсчитывая координату х вниз из положения статического равновесия груза.
Ответ:
![]() м.
м.
Задача 3.23. Под действием груза,
подвешенного к концу вертикальной
пружины, она получает статическое
удлинение
![]() м.
Найти закон колебаний, а также амплитуду
и период колебаний, если в начальный
момент груз находился в положении
равновесия и ему сообщили начальную
скорость
м.
Найти закон колебаний, а также амплитуду
и период колебаний, если в начальный
момент груз находился в положении
равновесия и ему сообщили начальную
скорость
![]() м/с,
направленную вверх.
м/с,
направленную вверх.
Ответ:
![]() м;
м;
![]() м;
T = 0,45 с.
м;
T = 0,45 с.
Задача 3.24. При равномерном спуске на тросе груза весом P = 20 кН со скоростью 5 м/с вследствие защемления верхнего конца троса в обойме блока произошла его неожиданная задержка. Определить наибольшее натяжение троса при последующих колебаниях груза, если коэффициент жесткости троса с = 4 МН/м. Весом троса пренебречь.
Ответ: Тmax = 0,47 МН.
Задача 3.25. Груз Q падает с высоты h = 1 м без начальной скорости на горизонтальную балку в ее середине и совершает затем безотрывные колебания вместе с балкой, концы которой закреплены. Найти закон колебаний груза, отсчитывая координату x вниз из положения его статического равновесия, если статический прогиб в середине балки при нагрузке Q составляет 0,5 см. Массой балки пренебречь.
Ответ:
![]() м.
м.
Задача 3.26. Тело, прикрепленное к
пружине, находится на гладкой плоскости
под углом 30 к
горизонту. Статическое удлинение пружины
![]() Определить закон колебаний груза, если
в начальный момент пружину растянули
из недеформированного состояния
на длину 3f и груз отпустили без
толчка.
Определить закон колебаний груза, если
в начальный момент пружину растянули
из недеформированного состояния
на длину 3f и груз отпустили без
толчка.
Ответ:
![]() .
.
Задача 3.27. Тело массой 12 кг совершает на вертикальной пружине гармонические колебания. За 45 с оно совершило 100 полных колебаний, после чего к пружине прикрепили дополнительный груз массой 6 кг. Определить период колебаний системы с обоими грузами.
Ответ: Т = 0,55 с.
Задача 3.28. Найти жесткость с пружины, эквивалентной двойной пружине, состоящей из двух последовательно соединенных пружин с коэффициентами жесткости с1 и с2. Определить также период колебаний груза весом Q на такой двойной пружине.
Ответ:
![]() ;
;
![]()
Задача 3.29. Груз весом Р = 98 Н находится на горизонтальной гладкой плоскости. Слева и справа он соединен с двумя горизонтальными пружинами жесткостью с1 = 40 Н/см, с2 = 50 Н/см. В положении равновесия пружины недеформированы. В начальный момент груз смещен вправо на 4 см из положения равновесия (в сторону оси х) и ему сообщена в ту же сторону начальная скорость v0 = 90 м/с. Найти уравнение движения и период колебаний груза.
Ответ:
![]() м,
м,
![]() рад.
рад.
Задача 3.30. Груз весом Р подвешен
к концу В эластичного шнура, верхний
конец которого закреплен в точке А.
Груз поднимают в точку А и затем
отпускают без начальной скорости. Найти
наибольшее удлинение шнура, если его
естественная длина (без груза) равна
![]() ,
а статическое удлинение при действии
силы Р равно
,
а статическое удлинение при действии
силы Р равно
![]()
Ответ:
![]()

Ответ:
![]()