7.4.4 Способы регулирования скорости двигателя постоянного
Анализ уравнения (7.22) позволяет определить способы регулирова-
ния скорости электродвигателей. Для регулирования скорости можно ис-
пользовать изменение следующих параметров электродвигателя:
изменением сопротивления якорной цепи путем введения добавоч-
ных сопротивлений;
изменением магнитного потока путем введения дополнительного со-
противления в цепь обмотки возбуждения;
изменением напряжения, подводимого к якорной цепи при наличии индивидуального источника питания двигателя.
Механические характеристики двигателя при постоянстве парамет-
ров rя , 0 , U , представляют собой линейные зависимости:
a − M ⋅ b
Механическая характеристика двигателя, полученная при отсутствии
добавочных сопротивлений в якорной цепи, при номинальных значениях магнитного потока и питающего напряжения называется естественной.
161
Изменяя тот или иной параметр механической характеристики мож- но для заданных значений момента сопротивления на валу двигателя полу- чить различные скорости вращения, т.е. регулировать скорость двигателя. Полученные механические характеристики будут называться искусствен- ными.
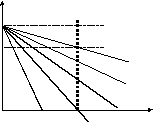
Регулирование скорости двигателя изменением сопротивления якор-
ной цепи. Как видно на рисунке 7.13 все характеристики пересекаются в
точке 0
при M =0. Эта скорость называется скоростью идеального холо-
 стого
хода
и определяется выражением
стого
хода
и определяется выражением


U ;
U ;
0
∆ M ⋅
rя rд
0
 0
0
 н
н
r5 Mн
r
 r1
=
rя
r1
=
rя
r2
r3
M (I)
Если в цепь якоря вклю- чать дополнительные сопротив- ления, то механические харак- теристики, полученные при этом, называются искусствен- ными или реостатными. Рео- статные характеристики так же линейны как и естественная, но имеют значительно больший наклон к оси моментов, т.е. об- ладают меньшей жесткостью. Чем больше сопротивление, тем
Рисунок 7.13
круче характеристики, тем меньше ее жесткость.
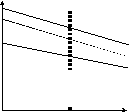
Регулирование скорости вращения двигателя изменением магнитно- го потока. При включении регулировочного реостата в цепь обмотки воз- буждения (рисунок 7.14,а), магнитный поток уменьшается, а скорость двигателя растет. Жесткость характеристик при изменении магнитного потока несколько ниже (рисунок 7.14,б), чем у естественной. Следует об- ратить внимание на то, что при малых значениях тока возбуждения, или при случайном обрыве цепи возбуждения скорость вращения двигателя резко возрастает и становится опасной для механической прочности двига- теля. Двигатель идет «в разнос». Поэтому при эксплуатации двигателя не- обходимо следить за исправностью цепи возбуждения.
162


 01
rп
01
rп
 0
0
 U
U
 Я ОВД
Я ОВД


 Mн M
Mн M
а) б)
 Рисунок
7.14
–
Механические
характеристики
(а)
и
схема
регулиро-
Рисунок
7.14
–
Механические
характеристики
(а)
и
схема
регулиро-
вания скорости изменением магнитного потока (б)

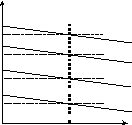
 Регулирование
скорости
вращения
двигателя
изменением
напряже-
ния
подводимого
к
якорю
двигателя
(рисунок
7.15).
Такое
регулирование
возможно
при
наличии
индивидуаль-
Регулирование
скорости
вращения
двигателя
изменением
напряже-
ния
подводимого
к
якорю
двигателя
(рисунок
7.15).
Такое
регулирование
возможно
при
наличии
индивидуаль-
ного источника питания двигателя.

 Жесткость
характеристики
в
данном
Жесткость
характеристики
в
данном
н

 жесткости естественной характери-
стики.
Раньше
часто
использовалась 1
схема
Г-Д
(генератор-двигатель),
те-
жесткости естественной характери-
стики.
Раньше
часто
использовалась 1
схема
Г-Д
(генератор-двигатель),
те-
перь чаще применяют полупроводни- 2
 ковые преобразователи. Современ-
ковые преобразователи. Современ-
ные преобразователи позволяют по- 3
лучить диапазон регулирования ско-
рости порядка 10000, т.е.
 M
н
M
M
н
M
max
min
10000.
Рисунок 7.15