

ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ К ГЛАВЕ 1
1.Дайте определение науки «Сопротивление материалов».
2.Что такое прочность конструкции?
3.Что такое жесткость конструкции?
4.Что такое устойчивость конструкции?
5.В чем заключается противоречивость требований надежности и экономичности конструкции?
6.Для чего в сопротивлении материалов используют эксперимент?
7.На каких дисциплинах базируется курс сопротивления материалов?
8.В каких последующих курсах используют результаты, полученные и сопротивлении материалов?
9.В чем состоит отличие математического аппарата курса сопротивления материалов от используемого в теории упругости, пластичности и ползучести?
10.Когда зародилась наука о сопротивлении материалов? С именем какого ученого связано ее появление?
21
ГЛАВА 2.
ГЕОМЕТРИЧЕСКЕ ХАРАКТЕРИСТИКИ ПЛОСКИХ СЕЧЕНИЙ
§ 2.1. МОМЕНТЫ ПЛОСКИХ СЕЧЕНИЙ
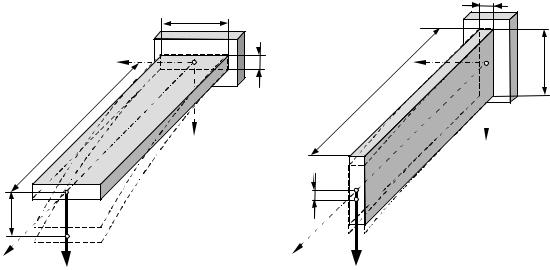
Величина перемещений и деформаций брусьев под действием внешних нагрузок зависит не только от физико-механических характеристик материала, но и от вида поперечного сечения. Рассмотрим два прямых бруса одинакового поперечного сечения. Длина обоих брусьев равна l. Они изготовлены из одинакового материала и нагружены одинаковыми внешними силами, различно ориентированными по отношению к сторонам поперечного сечения (рис. 2.1).
a |
a) |
x |
b |
l
y
|
b |
б) |
|
x |
a |
|
|
l |
|
|
y |
|
2 |
|
|
v |
|
1 |
|
|
v |
|
|
z |
z |
F |
|
F |
|
Рисунок 2.1
Из приведенного рисунка следует, что брус, изображенный на рис. 2.1, а является более гибким, чем брус, показанный на рис. 2.1, б. Вертикальное перемещение точки приложения силы будут существенно различны (v1 много больше, чем v2). Большая жесткость бруса во втором случае объясняется разницей в ориентации коротких и длинных сторон сечения по отношению к направлению действующей силыF. Следовательно, у этих брусьев различные геометрические характеристики поперечных сечений относительно осей х и у.
Рассмотрим произвольную область А, принадлежащую плоскости хОу ограниченную некоторой замкнутой кривой. Эту область в дальнейшем будем именовать плоским сечением. Пусть в системе прямоугольных декартовых координат хОу заданная точка K, принадлежащая поперечному сечению А. Координаты этой точки хK и уK. Полярные координаты этой точки определяются радиус-векторомrK и углом aK (рис. 2.2). Если в пределах области А задать некоторую функ-
22

y
|
K |
|
yK |
|
rK |
A |
O aK |
|
цию f(x,y) координат всех точек сече-
ния, то момент площади поперечного сечения будет определяться следующим образом:
|
|
M = òò f (x, y)dA . |
(2.1) |
|
|
A |
|
xK |
x |
В частности, если функция коор- |
|
|
динат точек поперечного сечения явля- |
||
|
ется |
степенной функцией |
следующего |
Рисунок 2.2 |
вида f (x, y) = xт yn , то в соответствии с |
|
выражением (2.1) получаем |
|
|
|
|
|
|
M = òòxт уп dA . |
(2.2) |
|
A |
|
В курсе «Техническая механика» используют следующие |
виды |
|
моментов площади поперечного сечения:
-момент нулевого порядка( т = п = 0 ) является площадью заданного сечения. Размерность площади сечения [м2]:
M = òòx0 у0 dA = А . |
(2.3) |
A |
|
-моменты первого порядка( т = 0 , п = 1 или т = 1, п = 0 ) назы-
ваются статическими моментами. Размерность моментов площади первого порядка [м3]:
Sx = òòx0 у1dA = òò ydA, |
S у = òòx1 у0 dA = òòхdA. |
(2.3) |
||
A |
A |
A |
A |
|
-моменты второго порядка ( т = 0 , п = 2 или т = 2 , п = 0 ) назы-
ваются осевыми моментами инерции. Размерность моментов инерции [м4]:
J x = òòx0 у2 dA = òò y 2dA, |
J у = òòx2 у0 dA = òòх2dA. |
(2.4) |
||
A |
A |
A |
A |
|
-момент второго порядка, когда т =1 и п = 1 получаем центро-
бежный момент инерции:
Dxy = òòx1 у1dA = òòxydA . |
(2.5) |
|
A |
A |
|
Размерность центробежного момента инерции [м4].
Если в пределах рассматриваемой областиА функцию f всех ее точек задать в полярной системе координат, то получим полярный момент инерции (момент инерции второго порядка):
23

J r = òòr 2 dA = òò(x2 + y2 )dA = J x + J y . |
(2.6) |
|
A |
A |
|
Если положение центра тяжести поперечного сечения определено, то координаты этой точки О (xo, yo) известны. Тогда из выражений (2.3) следует
Sy = xo A и Sx = yo A . |
(2.7) |
где А - площадь поперечного сечения.
Таким образом, координаты центра тяжести поперечного сечения относительно выбранных координатных осей x и y могут быть найдены с помощью уравнений:
xo |
= |
S y |
= |
òò хdA |
и yo = |
S |
x |
= |
òò ydA |
. |
(2.8) |
||
A |
|
A |
|||||||||||
А |
А |
А |
А |
||||||||||
|
|
|
|
|
|
|
|||||||
Когда заданное поперечное сечение можно разбить наn элементов, для каждого из которых известно положение центров тяжести и их площадь, то интегрирование в выражении (2.8) можно заменить суммированием
|
n |
|
n |
|
|
xo = |
åxi Ai |
и yo = |
å yi Ai |
. |
(2.9) |
i =1 |
i =1 |
||||
n |
n |
||||
|
å Ai |
|
å Ai |
|
|
|
i =1 |
|
i =1 |
|
|
Уравнения (2.9) используются для вычисления координат центра тяжести составного поперечного сечения.
§2.2 ВЫЧИСЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ПРОСТЕЙШИХ ГЕОМЕТРИЧЕСКИХ ФИГУР
Вычисление моментов инерции некоторых простейших фигур может быть выполнено непосредственным интегрированием выражений (2.4). Рассмотрим несколько наиболее распространенных фигур.
Прямоугольник. Разобьем прямоугольник на элементарные площадки, параллельные оси Ох. Площадь каждого отдельного элемента определяется равенством dA = bdy (рис. 2.3). Найдем момент инерции относительно центральной оси Ох:
|
h 2 |
|
bh |
3 |
|
J x = òò y2 dA = b ò |
y2 dy = |
|
. |
||
|
|
||||
A |
-h 2 |
12 |
|
||
Аналогичным образом найдем момент инерции относительно центральной оси Оу. В этом случае площадь элемента равна dA = hdx :
24

h
у1 у
 dA
dA
О
у1
b
Рисунок 2.3
у dу
x
x1
|
b 2 |
|
hb |
3 |
|
J y = òò x2 dA = h ò |
x2 dy = |
|
. |
||
|
|
||||
A |
-b 2 |
12 |
|
||
Для осей, совпадающих со сторонами прямоугольника, имеем
h |
|
bh |
3 |
|
; |
||
J x1 = bò y12 dy1 |
= |
|
|
||||
|
|
|
|
||||
0 |
3 |
|
|
|
|||
b |
3 |
h |
|
|
|||
J y1 = hò x12 dx1 |
= |
b |
. |
||||
|
|
||||||
0 |
3 |
|
|
|
|||
Находим центробежный момент инерции относительно осей х1Оу1, принимая площадь элемента dA = bdy :
|
h |
b |
|
2 |
h |
2 |
|
|
Dx1у1 = òò xx y1dA = ò |
y1bdy1 |
= |
b |
|
. |
|||
2 |
|
|
|
|||||
A |
0 |
|
4 |
|
|
|||
Треугольник. Вычислим осевой момент инерции равнобедренного треугольника относительно центральной оси Ох. Ширина элементарной площадки определяется из подобия треугольников (рис. 2.4) и равна
у |
|
|
by |
|
a |
|
|
|
dA |
|
у |
|
|
d |
h |
|
у |
О |
x |
1 |
h |
у |
|
|
|
dA |
b |
x |
dx |
|
|
|
Рисунок 2.4
|
|
|
|
|
|
|
|
|
|
b |
æ 2 |
|
|
|
|
ö |
|
|
|
|
||||
|
|
|
|
|
|
by |
= |
|
|
ç |
|
|
|
h |
- y ÷ . |
|
|
|
||||||
|
|
|
|
|
|
h |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
è 3 |
|
|
|
|
ø |
|
|
|
|
|||||
|
Подставляя полученное выражение |
|||||||||||||||||||||||
|
в формулу (2.5) имеем |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
2h / 3 |
|
|
2 |
b æ |
2 |
|
|
ö |
||||||
|
J x = òò y |
|
dA = ò |
y |
|
|
ç |
|
|
h |
- y ÷dy = |
|||||||||||||
x |
|
|
|
3 |
|
|||||||||||||||||||
|
A |
|
|
|
|
|
|
-h / 3 |
|
|
|
h è |
|
|
ø |
|||||||||
x1 |
|
|
b |
2h / 3 |
æ |
2 |
|
|
|
2 |
|
|
|
|
3 ö |
|
|
|
|
bh3 |
||||
|
= |
|
|
|
ò |
|
ç |
|
hy |
|
|
- y |
÷dy = |
|
|
. |
||||||||
|
|
h |
|
|
3 |
|
|
36 |
||||||||||||||||
|
|
|
-h / 3 |
è |
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|||||||
Найдем момент инерции относительно центральной оси О1х1:
|
b |
h |
|
bh |
3 |
|
J x1 = òò y12 dA = |
ò y12 (h - y1 )dy1 |
= |
|
. |
||
h |
|
|
||||
A |
0 |
12 |
|
|||
Аналогичным образом найдем момент инерции относительно оси симметрии Оу. В этом случае высота элементарной площадки из подобия треугольников равна:
|
|
2h æ b |
ö |
|
|||
hx |
= |
|
ç |
|
- x ÷ |
, |
|
b |
2 |
||||||
|
|
è |
ø |
|
|||
25

следовательно,
|
2 |
|
2h b 2 |
æ b |
ö |
2 |
|
hb3 |
|||
J y = òòx |
|
dA = 2 |
|
ò |
ç |
|
- x ÷x |
|
dx = |
|
. |
|
b |
2 |
|
48 |
|||||||
A |
|
|
0 |
è |
ø |
|
|
|
|||
D
|
у |
dА |
Круг. Для круга удобнее всего вы- |
|||
|
|
числить сначала полярный момент инер- |
||||
|
|
|
ции. На рисунке 2.5 показана элементар- |
|||
r |
dj |
|
ная площадка, |
вырезанная двумя радиу- |
||
|
сами и двумя параллельными окружно- |
|||||
|
j |
|
||||
О |
dr |
x |
стями, площадь которой равна |
|
||
|
|
|
|
dA = rdjdr . |
|
|
|
R |
|
Тогда, подставляя |
полученное |
вы- |
|
|
|
ражение в уравнение (2.7), окончательно |
||||
Рисунок 2.5 |
|
|||||
|
получаем |
|
|
|
||
|
|
|
2p |
R |
|
|
Jr = òòr2dA = òòr2 rdjdr = òdjòr3dr =
A |
|
A |
|
0 |
0 |
||||
|
R |
4 2p |
pR |
4 |
|
pD |
4 |
|
|
= |
|
òdj = |
|
= |
|
. |
|||
|
|
2 |
|
|
|
||||
4 |
0 |
32 |
|
||||||
Учитывая, что полярный момент инерции равен сумме двух осевых моментов, имеем
J x = J y = |
J r |
|
pR4 |
pD4 |
|||
|
= |
|
= |
|
. |
||
2 |
4 |
64 |
|||||
|
|
|
|
||||
Кольцо. Момент инерции кольца может быть найден как разность моментов инерции наружного и внутреннего круга. Тогда полярный момент и осевые моменты инерции соответственно равны:
J r |
= |
pR4 |
- |
pr 4 |
= |
p |
(R 4 - r 4 ) и J x |
= J y |
= |
pR4 |
- |
pr 4 |
= |
p |
(R 4 - r 4 ). |
|
|
|
|
|
|
||||||||||
|
2 |
2 |
2 |
|
|
4 |
4 |
4 |
|
||||||
Геометрические характеристики различных геометрических фигур приведены в приложении.
§2.3 ПРЕОБРАЗОВАНИЕ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ ОСЕЙ
Рассмотрим преобразование моментов плоских сечений при параллельном переносе координатных осей. Задано некоторое плоское сечение А, ограниченное внешним замкнутым контуром. Геометрические характеристики этого сечения относительно системы координат
26

x1O1y1 известны. Определим геометрические характеристики сечения относительно новой системы координат xOy (рис. 2.6). Связь между координатами точки K определяется выражениями
xK = xK1 + a1 и yK = yK1 + b1 . |
(2.10) |
Статические моменты сечения относительно осейxOy в соответствии с выражениями (2.3) и с учетом соотношений (2.10) имеют вид
Sx = òò( yK1 + b1 )dA = Sx1 + b1 A;
y |
xK |
y1 |
|
|
|
|
|
|
|
|
A |
|
|
|
|
(2.11) |
|
|
|
|
|
|
|
S y = òò(xK1 + a1 )dA = S y1 + a1 A. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
a1 |
K |
|
|
|
|
|
|
|
|
Для |
каждого |
поперечного сече- |
||||
|
|
|
|
|
|
|
ния существует множество пар вза- |
||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
O1 |
|
|
|
|
|
|
x1 |
имно |
перпендикулярных осей, |
отно- |
||||||
|
|
|
K |
|
|
|
сительно |
|
которых |
статические |
- мо |
||||||
|
A |
|
y |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
менты равны нулю. Такие оси |
назы- |
|||||||
|
|
|
|
|
|
|
b |
x |
|||||||||
O |
|
|
|
|
|
|
|
вают центральными осями. Они все- |
|||||||||
|
Рисунок 2.6 |
|
|
|
|
гда проходят через центр тяжести по- |
|||||||||||
|
|
|
|
|
перечного сечения. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Осевые моменты инерции при параллельном переносе коорди- |
||||||||||||||||
натной системы будут определяться следующим образом: |
|
|
|||||||||||||||
|
|
J x = òò( yK1 + b1 )2 dA = J x1 + 2Sx1b1 + b12 A; |
|
|
|
||||||||||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.12) |
|
|
|
J y = òò(xK1 + a1 )2 dA = J y1 + 2S y1a1 + a12 A. |
|
||||||||||||||
|
|
|
|
|
|||||||||||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Преобразование для центробежного момента инерции имеет вид |
|
|||||||||||||||
|
Dxy = òò( yK1 + b1 )(xK1 + a1 )dA = Dx1y1 + Sx1b1 + S y1a1 + a1b1 A . |
(2.13) |
|||||||||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если оси x1O1y1 |
являются центральными, |
то выражения (2.12) |
и |
|||||||||||||
(2.13) приводятся к следующему виду: |
|
|
|
|
|
|
|
||||||||||
|
|
J |
x |
= J |
x1 |
+ b2 A |
и J |
y |
= J |
y1 |
+ a |
2 A , |
|
(2.14) |
|||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|||||
|
|
|
|
|
Dxy |
= Dx1y1 + a1b1 A . |
|
|
|
|
(2.15) |
||||||
§2.4 ПРЕОБРАЗОВАНИЕ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ ПОВОРОТЕ КООРДИНАТНЫХ ОСЕЙ
Рассмотрим преобразование моментов плоских сечений при -по вороте координатных осей. Задано некоторое плоское сечение А, ограниченное внешним замкнутым контуром. Геометрические характери-
27

стики сечения относительно системы координат xOy известны. Координаты точки K, принадлежащей заданному сечению А соответственно равны хK и уK. Координаты этой точки в новой системе координатxОh (рис. 2.4) соответственно равны
x = x × cosa + y × sin a;
|
|
h = y × cosa - x × sin a. |
|
|
(2.16) |
||||
|
|
|
|
|
|||||
|
|
|
|
|
Положительным |
направлением |
|||
h |
y |
|
|
|
будем |
считать |
поворот |
координатных |
|
|
|
|
|
осей, направленный против часовой |
|||||
|
|
|
|
|
стрелки. Тогда статические моменты |
||||
|
yK |
K |
|
|
будут равны |
|
|
||
|
|
|
|
x |
Sh |
= S y |
cosa + Sx sin a; |
||
|
hK |
xK a |
|
|
|
||||
|
|
|
|
Sx |
|
|
(2.17) |
||
A |
O |
хK |
x |
= Sx cosa - S y sin a. |
|||||
|
|
|
|
|
|||||
|
|
|
|
|
В |
соответствии |
с уравнениями |
||
|
|
|
|
|
(2.4) и (2.5) осевые моменты и центро- |
||||
|
Рисунок 2.7 |
|
|
бежный момент инерции относительно |
|||||
|
|
|
осей xОh равны |
|
|||||
|
|
|
|
|
|
||||
|
Jh |
= òòx 2 dA = J y |
cos2 a + Dxy sin 2a + J x sin 2 a; |
|
|||||
|
|
A |
|
|
|
|
|
|
(2.18) |
|
Jx |
= òòh 2 dA = J x cos2 a - Dxy sin 2a + J y sin 2 a. |
|||||||
|
|
||||||||
|
|
A |
|
1 |
|
|
|
|
|
|
Dxh = òòhxdA = |
(J x - J y ) sin 2a + Dxy cos 2a . |
(2.19) |
||||||
|
|
||||||||
|
|
A |
2 |
|
|
|
|
|
|
§ 2.5 ГЛАВНЫЕ ОСИ И ГЛАВНЫЕ МОМЕНТЫ ИНЕРЦИИ ПЛОСКОГО СЕЧЕНИЯ
Оси xОh называются главными центральными осями инерции, ес-
ли центробежный момент Dxh равен нулю. Главные центральные оси
всегда проходят через центр тяжести поперечного сечения. Моменты инерции относительно главных центральных осей называютсяглавными моментами инерции. При этом величины осевых моментов инерции Jx и Jh получают экстремальные значения из всех возможных при по-
вороте координатных осей относительно центра тяжести рассматриваемого сечения.
Определим положение главных центральных осей. Из выражения для центробежного момента (2.19) следует, что угол поворота между осью Ох и главной осью Оx будет равен:
28

tg 2a |
2Dxy |
|
0 = (J y - J x ). |
(2.20) |
Далее главные оси будем обозначать UOV. Значения главных моментов инерции можно получить из формул перехода к повернутым осям (2.18):
JV |
= J y cos2 a + Dxy sin 2a + J x sin 2 a; |
(2.21) |
||||
JU |
= J x cos2 a - Dxy sin 2a + J y sin 2 a. |
|||||
|
||||||
Преобразуем формулы (2.21) для главных центральных моментов |
||||||
инерции, записывая их сумму и разность. Очевидно, что |
|
|||||
|
JU + JV = J x |
+ J y ; |
(2.22) |
|||
JU - JV = (J x - J y )cos 2a - 2Dxy |
sin 2a = (J x - J y ) |
4 |
. |
(2.23) |
||
|
||||||
|
|
|
cos 2a |
|
||
При выводе выражения (2.23) сделана замена центробежного момента Dxy в соответствии с формулой (2.20) 2Dxy = (J y - J x )tg 2a .
Как следует из равенства (2.22), сумма осевых моментов инерции при повороте прямоугольных осей не изменяется, т.е. является инвариантной для такого преобразования координат. Теперь из формул (2.23) и (2.23) находим следующие выражения:
|
|
1 |
é |
|
|
1 |
ù |
|
JU |
= |
|
ê(J x |
+ J y ) + (J x - J y ) |
|
ú |
; |
|
2 |
|
|||||||
|
|
ë |
|
|
cos 2a û |
|
||
|
|
1 |
é |
|
|
1 |
ù |
|
JV |
= |
|
ê(J x |
+ J y ) - (J x - J y ) |
|
|
ú . |
|
2 |
|
|
||||||
|
|
ë |
|
|
cos 2a û |
|
||
Очевидно, что при J x > J y момент JU > JV . Используя формулу (2.20), можно исключить из полученных выражений величину
|
1 |
= ± |
1 + tg |
2 |
2a = ± 1 + |
4Dxy2 |
. |
|
cos 2a |
|
(J y - J x )2 |
||||
|
|
|
|
|
|
||
В результате имеем |
|
|
|
|
|
|
|
JU |
= 1 [(J x + J y ) ± (J y - J x )2 + 4Dxy2 ]; |
|
|||||
|
2 |
|
|
|
|
|
(2.24) |
|
= 1 [(J x + J y ) m (J y - J x )2 + 4Dxy2 ]. |
||||||
JV |
|
||||||
|
2 |
|
|
|
|
|
|
29

Верхние знаки в |
уравнениях(2.24) |
необходимо |
использовать при |
|
J x > J y , а нижние - при J y |
> J x . Объединяя выражения (2.24), оконча- |
|||
тельно получаем |
|
|
|
|
J max |
= 1 [(J x |
+ J y ) ± (J y |
- J x )2 + 4Dxy2 ]. |
(2.25) |
min |
2 |
|
|
|
Формулы (2.20) и (2.25) позволяют определить как положение главных осей так и величины главных центральных моментов инерции сечения. Если теперь вместо произвольной начальной системы координат xOy принять главные оси UOV ( DUV = 0 ), то формулы (2.18) преобразования геометрических характеристик при повороте координатных осей упрощаются
J x = JU cos2 a + JV sin 2 a;
(2.26)
J y = JV cos2 a + JU sin 2 a.
Центробежный момент инерции относительно повернутых осей
будет равен |
|
|
|
|
Dxy |
= |
1 |
(JU - JV ) sin 2a . |
(2.27) |
|
||||
|
2 |
|
|
|
§2.6 РАДИУСЫ ИНЕРЦИИ И ЭЛЛИПС ИНЕРЦИИ. МОМЕНТЫ СОПРОТИВЛЕНИЯ ПЛОСКОГО СЕЧЕНИЯ
Момент инерции плоского сечения относительно какой-либо оси можно представить в виде произведения площади фигуры на квадрат некоторой величины:
J x = òò y 2dA = Aix2 .
A
Из полученного выражения следует, что |
|
ix = J x А и iy = J y А . |
(2.28) |
Величины ix и iy , определяемые по формулам (2.28), называются
радиусами инерции относительно соответствующих осей. Главным центральным осям инерции соответствуют главные радиусы инерции.
Построим на главных центральных осях инерции сечения эллипс с полуосями, равными главным радиусам инерции. Вдоль оси U будем откладывать отрезки iV , а вдоль оси V - отрезки iU (рис. 2.8). Такой эллипс называется эллипсом инерции. С помощью эллипса инерции можно графически определить радиус инерции относительно любой цен-
30