

Измерение сети |
ноябрь 2009 |
3.2.2 Особенности ввода характеристик цифровой камеры
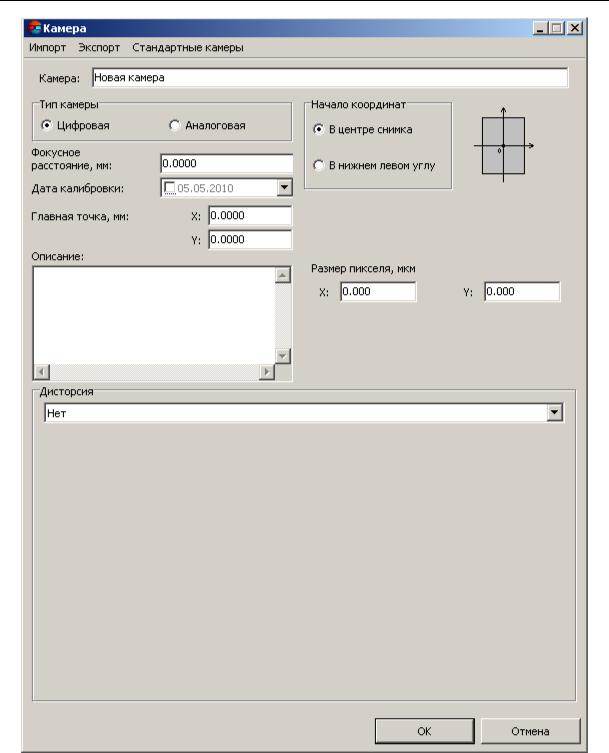
Для ввода/редактирования цифровой камеры для текущего проекта, откройте окно
Управление камерами проекта с помощью кнопки  (см. раздел Управление
(см. раздел Управление
камерами) и нажмите в этом окне кнопку  (Создать камеру) или
(Создать камеру) или  (Редактировать камеру). Откроется окно Камера. Введите имя камеры в соответствующем поле при создании новой камеры. В разделе Тип камеры укажите
(Редактировать камеру). Откроется окно Камера. Введите имя камеры в соответствующем поле при создании новой камеры. В разделе Тип камеры укажите
Цифровая.
При вводе характеристик цифровой камеры, параметры камеры, такие как координаты главной точки, величина фокусного расстояния, точка симметрии (нулевая дисторсия) задаются в мм, а размер пиксела и значения коэффициентов дисторсии в мкм.
В разделе Начало координат определите начало координат, относительно которого будут вводиться смещения главной точки и точки симметрии для учета дисторсии из паспорта камеры:
–относительно центра левого нижнего пиксела;
–относительно центра снимка.
13 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |
PHOTOMOD 5.0
Ввод параметров цифровой камеры Рассмотрим пример ввода параметров цифровой камеры DSS.
ПАСПОРТ КАМЕРЫ DSS
Таблица.1 Параметры калибровки камеры
© 2009 |
14 |
Измерение сети |
|
|
ноябрь 2009 |
|
|
|
|
|
|
|
Параметр |
Значение |
|
|
|
Фокусное расстояние (мм) |
54.995 |
|
|
|
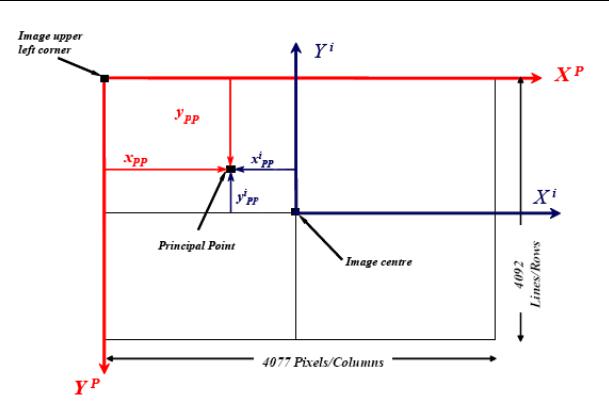
x pp (пикселы) + |
2011.49 |
|
|
|
y pp (пикселы) + |
2018.91 |
|
|
|
xi pp |
(мм) ++ |
-0.243 |
|
|
yi pp |
(мм) ++ |
0.244 |
|
+ |
x pp |
и |
y pp |
– координаты главной точки, |
измеренные от левого верхнего угла |
|
изображения, (размер изображения 4077 x 4092); |
||||||
++ |
xi pp |
и |
yi pp |
– |
координаты главной точки, |
измеренные от центрального пиксела |
изображения (размер пиксела = 9 микрон). |
|
|||||
|
|
|
|
|
Таблица. 2 Радиальная дисторсия |
|
|
Расстояние (мм) |
Радиальная дисторсия (пикселы) Радиальная дисторсия (микроны) |
||||
|
1 |
|
|
|
-0.00 |
-0.022 |
|
2 |
|
|
|
-0.02 |
-0.180 |
|
3 |
|
|
|
-0.07 |
-0.607 |
|
4 |
|
|
|
-0.16 |
-1.441 |
|
5 |
|
|
|
-0.31 |
-2.833 |
|
6 |
|
|
|
-0.54 |
-4.897 |
|
7 |
|
|
|
-0.86 |
-7.783 |
|
8 |
|
|
|
-1.29 |
-11.589 |
|
9 |
|
|
|
-1.84 |
-16.571 |
|
10 |
|
|
|
-2.53 |
-22.747 |
|
11 |
|
|
|
-3.37 |
-30.287 |
|
12 |
|
|
|
-4.37 |
-39.313 |
|
13 |
|
|
|
-5.55 |
-49.937 |
|
14 |
|
|
|
-6.93 |
-62.376 |
|
15 |
|
|
|
-8.50 |
-76.486 |
|
16 |
|
|
|
-10.27 |
-92.419 |
|
17 |
|
|
|
-12.22 |
-110.024 |
|
18 |
|
|
|
-14.42 |
-129.783 |
|
19 |
|
|
|
-16.79 |
-151.116 |
|
20 |
|
|
|
-19.34 |
-174.056 |
|
21 |
|
|
|
-22.04 |
-198.395 |
|
22 |
|
|
|
-24.87 |
-223.839 |
|
23 |
|
|
|
-27.80 |
-250.233 |
|
24 |
|
|
|
-30.73 |
-276.592 |
|
25 |
|
|
|
-33.61 |
-302.506 |
|
26 |
|
|
|
-36.35 |
-327.179 |
15 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |
PHOTOMOD 5.0
Обозначения:
1.X i и Y i : Система координат изображения – Правая
2.X p и Y p : Система координат Пиксел/Монитор – Левая
Смещения главной точки на цифровом изображении камеры DSS
Примечание: точка симметрии для учета дисторсии в данном случае совпадает с главной точкой
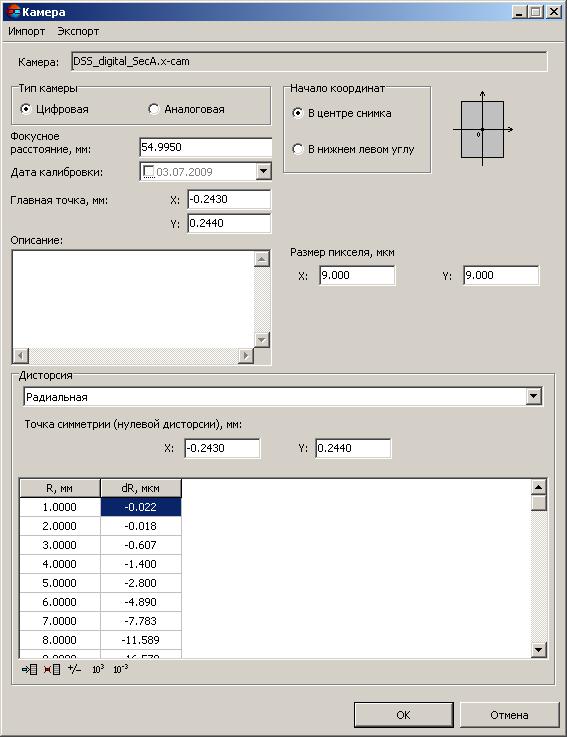
В окне Камеры введите следующие значения:
© 2009 |
16 |
Измерение сети |
ноябрь 2009 |
Ввод характеристик цифровой камеры DSS
•Информация о метках – Цифровая камера
•Начало координат – В центре снимка
•Размер пиксела – 9 мкм
•Фокусное расстояние – 54.995 мм
•Главная точка (координаты главной точки от центра изображения):
X = xi pp = - 0.243 мм Y = yi pp = 0.244 мм
•Точка симметрии (координаты нулевой дисторсии) в разделе Дисторсия (совпадают с координатами главной точки):
•X= - 0.243 мм,
17 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |