

PHOTOMOD 5.0
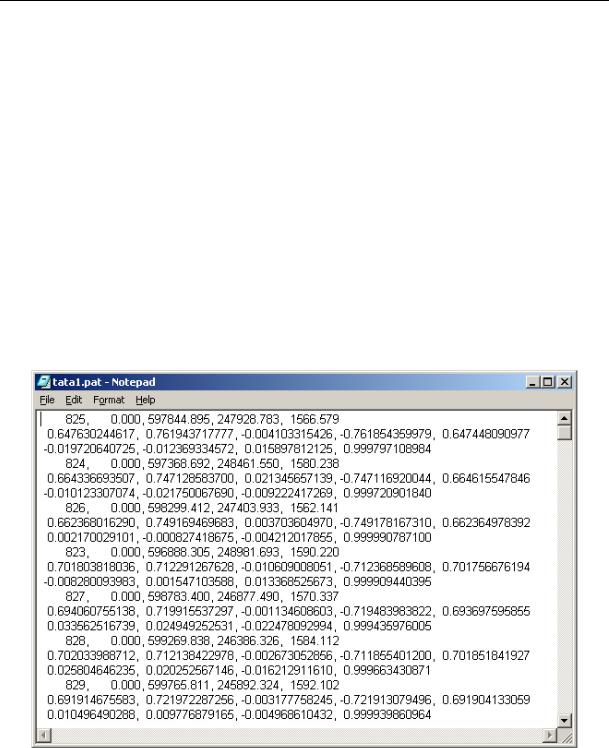
Первым числом в каждой строке файла является номер снимка, затем может идти нулевое значение, далее три значения X, Y, Z координат центра проекции и, в следующих двух строках, 9 значений элементов матрицы поворота (3X3) – пять значений в первой строке и четыре во второй, Разделителем является пробел (или запятая).
При этом порядок ввода и формулы расчёта элементов матрицы следующие:
a11, a21, a31, a12, a22 a32, a13, a23, a33
a11 = cos φ x cos κ
a21 = cos κ x sin φ x sin ω + cos ω x sin κ a31 = -cos κ x sin φ x cos ω + sin ω x sin κ a12 = -sin κ x cos φ
a22 = cos κ x cos ω – sin ω x sin φ x sin κ a32 = sin ω x cos κ + cos ω x sin φ x sin κ a13 = sin φ
a23 = -sin ω x cos φ
a33 = cos ω x cos φ
Пример файла с элементами внешнего ориентирования в виде матрицы PAT-B
5.2 Импорт из метаданных UltraCam
При наличии в растровых файлах UltraCam метаданных в процессе преобразования растров во внутренний формат с помощью программы RasterConverter (см. Руководство пользователя Общие сведения) или при загрузке снимков в проект с использованием команды Добавить изображения из файлов (см. Руководство пользователя Создание проекта) создаются файлы с расширением *.md, которые размещаются там же, где и преобразованные растры.
Из таких md-файлов для загруженных в проект снимков с помощью команды
Ориентирование | Импорт ориентирования из метаданных можно извлечь
© 2009 |
122 |
Измерение сети |
ноябрь 2009 |
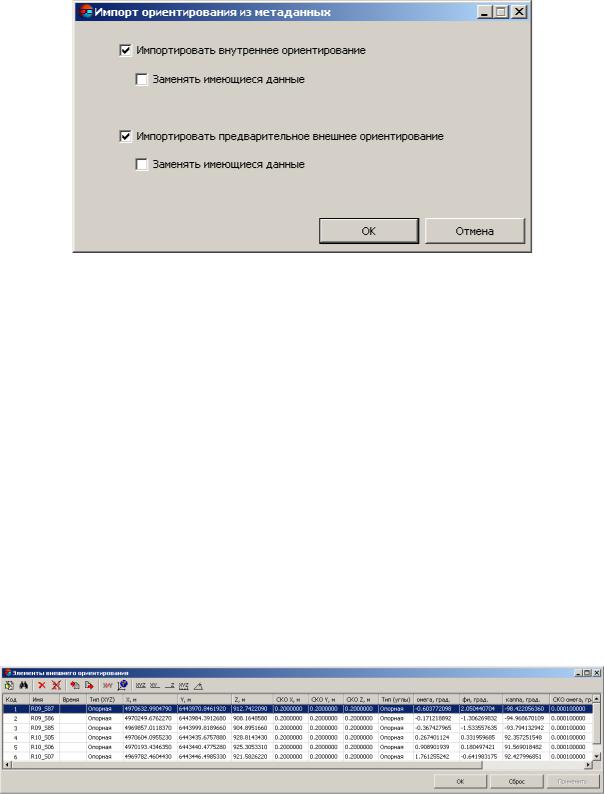
элементы внутреннего и предварительного внешнего ориентирования. При этом для каждой использованной камеры в проекте создается файл камеры с именем серийного номера камеры.
Для импорта внешнего ориентирования необходимо, чтобы была задана глобальная система координат и значения перепада высот местности (см. разделы Новый проект и Свойства проекта в Руководстве пользователя Создание проекта). При выполнении команды открывается окно Импорт ориентирования из метаданных:
После импорта ориентирования из метаданных можно разбить проект на маршруты по внешнему ориентированию (команда меню Блок | Автоматическое разбиение на маршруты | По внешнему ориентированию), вычислить повороты в схеме блока (команда меню Блок | Повернуть снимки по накидному монтажу), уравнять по импортированным данным (команда меню Ориентирование | Прямое геопозиционирование) и в случае удовлетворительной точности (см. раздел Контроль точности импортированных данных) перейти на этап обработки проекта (см. Руководство пользователя Обработка проекта), иначе выполнить фототриангуляцию.
5.3 Каталог элементов внешнего ориентирования
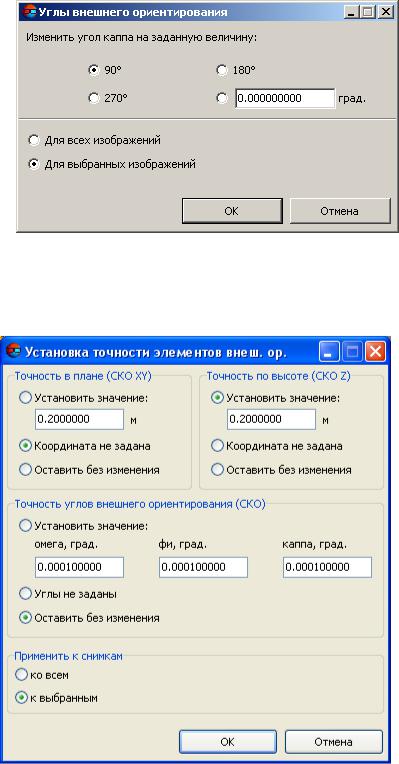
Каталог элементов внешнего ориентирования представляет собой список импортированных или введенных вручную данных внешнего ориентирования (координат центров проекций снимков и углов омега, фи, каппа, определяющих положение снимка в пространстве) и служит для ввода/импорта/редактирования этих данных.
Для открытия каталога служит команда меню Ориентирование | Каталог элементов
внешнего ориентирования (дублируется кнопкой  в главной панели PHOTOMOD Core и панели инструментов Триангуляция). Открывается окно Элементы внешнего ориентирования.
в главной панели PHOTOMOD Core и панели инструментов Триангуляция). Открывается окно Элементы внешнего ориентирования.
123 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |

PHOTOMOD 5.0
Панель инструментов содержит следующие кнопки:
• Режим редактирования – позволяет редактировать значения полей списка (поля код и имя снимка недоступны для редактирования).
Режим редактирования – позволяет редактировать значения полей списка (поля код и имя снимка недоступны для редактирования).
• Поиск – открывает окно для поиска снимка по имени.
Поиск – открывает окно для поиска снимка по имени.
• Очистить выбранные – позволяет удалить данные внешнего ориентирования для выбранных в списке снимков
Очистить выбранные – позволяет удалить данные внешнего ориентирования для выбранных в списке снимков
• Очистить все – позволяет очистить весь список с данными.
Очистить все – позволяет очистить весь список с данными.
• Импорт – открывает окно Импорт элементов внешнего ориентирования. См. раздел Окно Импорт элементов внешнего ориентирования.
Импорт – открывает окно Импорт элементов внешнего ориентирования. См. раздел Окно Импорт элементов внешнего ориентирования.
• Экспорт – позволяет экспортировать список с данными внешнего ориентирования в текстовые файлы (.csv и .txt).
Экспорт – позволяет экспортировать список с данными внешнего ориентирования в текстовые файлы (.csv и .txt).
• Поменять местами X и Y – позволяет при необходимости поменять значения координат в столбцах X и Y местами для выбранных или для всех снимков.
Поменять местами X и Y – позволяет при необходимости поменять значения координат в столбцах X и Y местами для выбранных или для всех снимков.
• Пересчитать в другую систему координат – открывает окно Пересчет системы координат, позволяющее выбрать другую систему для выбранных и для всех снимков.
Пересчитать в другую систему координат – открывает окно Пересчет системы координат, позволяющее выбрать другую систему для выбранных и для всех снимков.
• Установить для выделенных тип: планово-высотные – включает все три координаты X,Y,Z центров проекций для выделенных в списке снимков в случае, если какие-либо координаты были исключены.
Установить для выделенных тип: планово-высотные – включает все три координаты X,Y,Z центров проекций для выделенных в списке снимков в случае, если какие-либо координаты были исключены.
• Установить для выделенных тип: плановые – исключает Z-координату центров проекций для выделенных снимков. Значение исключенной координаты отображается серым цветом. При этом поле доступно для редактирования. После редактирования значения исключенной координаты, она автоматически подключается (будет использоваться).
Установить для выделенных тип: плановые – исключает Z-координату центров проекций для выделенных снимков. Значение исключенной координаты отображается серым цветом. При этом поле доступно для редактирования. После редактирования значения исключенной координаты, она автоматически подключается (будет использоваться).
• Установить для выделенных тип: высотные – исключаются X,Y-
Установить для выделенных тип: высотные – исключаются X,Y-
координаты центров проекций для всех выделенных снимков. Значения исключенных координат отображаются серым цветом. При этом поля доступно для редактирования. После редактирования значений исключенных координат, они автоматически подключаются (будут учитываться).
• Задать точности (СКО) определения координат и углов – открывает окно Установка точности элементов внешнего ориентирования для определения значений допуска в метрах на среднеквадратическую ошибку (СКО) в плане и по высоте, а также значений точности углов для выделенных или всех снимков.
Задать точности (СКО) определения координат и углов – открывает окно Установка точности элементов внешнего ориентирования для определения значений допуска в метрах на среднеквадратическую ошибку (СКО) в плане и по высоте, а также значений точности углов для выделенных или всех снимков.
• Изменить угол каппа – позволяет изменить значение угла каппа на заданную величину для всех или выделенных изображений. При нажатии кнопки открывается окно Углы внешнего ориентирования:
Изменить угол каппа – позволяет изменить значение угла каппа на заданную величину для всех или выделенных изображений. При нажатии кнопки открывается окно Углы внешнего ориентирования:
© 2009 |
124 |
Измерение сети |
ноябрь 2009 |
Реализована связь между окном Каталог элементов внешнего ориентирования и
2D окном, т.е. выделенные в схеме блока снимки автоматически будут выделены в списке окна Каталог элементов внешнего ориентирования и, наоборот, при выделение снимков в списке, эти снимки выделяется в схеме блока 2D окна.
5.4 Контроль точности импортированных данных
Для принятия решения о дальнейших действиях после импорта данных внешнего ориентирования необходимо оценить точность полученных результатов внешнего ориентирования. Контроль точности можно осуществить следующими способами:
•по накидному монтажу. Визуальная оценка накидного монтажа, построенного по данным внешнего ориентирования (см. раздел Использование данных внешнего ориентирования), позволяет выявить грубые ошибки в схеме блока. Следует, однако, помнить, что кроме самих импортированных данных, на
125 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |