

Измерение сети |
ноябрь 2009 |
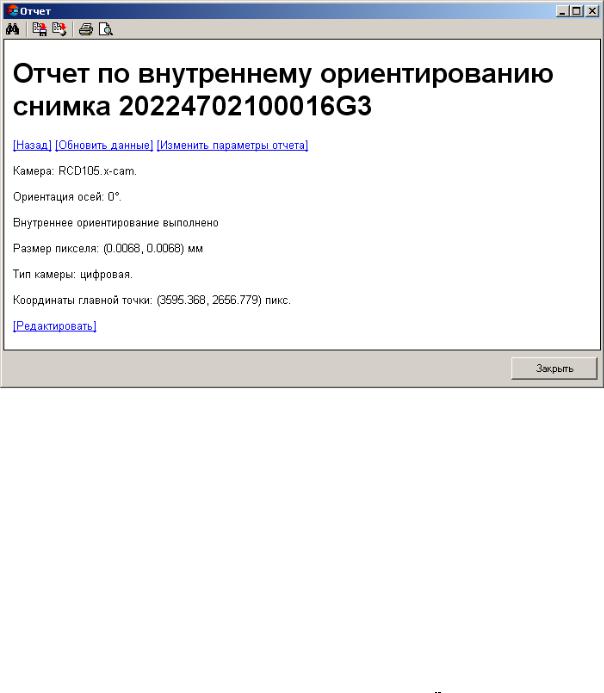
Отчет по внутреннему ориентированию снимка для цифровой камеры
Все окна отчета (всего блока или снимка) содержат верхнюю панель инcтрументов:
 – поиск по слову или его части;
– поиск по слову или его части;
 – позволяет сохранить отчет в файле HTML в любой папке файловой системы;
– позволяет сохранить отчет в файле HTML в любой папке файловой системы;
 – позволяет сохранить отчет в файле HTML в ресурсах активного профиля;
– позволяет сохранить отчет в файле HTML в ресурсах активного профиля;
 – позволяет распечатать отчет;
– позволяет распечатать отчет;
 – открывает окно предварительного просмотра печати;
– открывает окно предварительного просмотра печати;
4. Взаимное ориентирование и измерение опорных точек
Для построения сети пространственной фототриангуляции на стереопарах, помимо опорных точек (см. раздел Ввод и измерение опорных точек), необходимо измерить связующие точки, служащие для построения моделей по стереопарам смежных снимков маршрута для объединения их в маршрутные и блочные сети.
В том случае, если конечной целью работ по построению и уравниванию сетей фототриангуляции является лишь определение значений элементов внешнего ориентирования снимков, нет необходимости в выборе связующих точек на изображениях четких контуров местности: идентификация соответственных связующих точек на всех перекрывающихся снимках производится автоматически с помощью «коррелятора» или интерактивно в стереорежиме.
Если фототриангуляция выполняется для определения координат и высот точек, используемых как опорные при последующей фотограмметрической обработке одиночных снимков и стереопар, эти точки необходимо выбирать на изображениях чётких контуров местности. Далее такие связующие точки будем называть точками сгущения.
33 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |
PHOTOMOD 5.0
Под измерением связующей точки понимается ее стереоскопическое измерение, т.е. измерение одновременно на двух снимках стереопары (или нескольких снимках, содержащих точку).
Стереоскопическое измерение может выполняться тремя способами в ручном режиме
в(см. раздел Измерение связующих точек вручную):
•ручным позиционированием точки на каждом из изображений;
•ручным позиционированием точки на одном из изображений, с переносом её на другое изображение с помощью коррелятора;
•ручным позиционированием точки в трёхмерном пространстве в стереорежиме.
•автоматическим позиционированием точки на обоих изображениях с помощью коррелятора
Кроме того, измерение связующих точек может выполняться полностью в автоматическом режиме на выбранных снимках блока. См. раздел Автоматическое измерение связующих точек.
Примечание: В идеале для достижения хороших результатов при выполнении взаимного ориентирования рекомендуется совмещать два подхода – использовать автоматическое измерение с отбраковкой “плохих” точек и ручной режим для редактирования измерений, полученных в автоматическом режиме, и добавления новых точек.
Автоматический режим предоставляет широкие возможности для выполнения взаимного ориентирования снимков блока – комбинации множества параметров для измерения, переноса и отбраковки связующих точек по различным критериям могут дать удовлетворительные результаты в некоторых случаях даже без необходимости проведения измерений в ручном режиме.
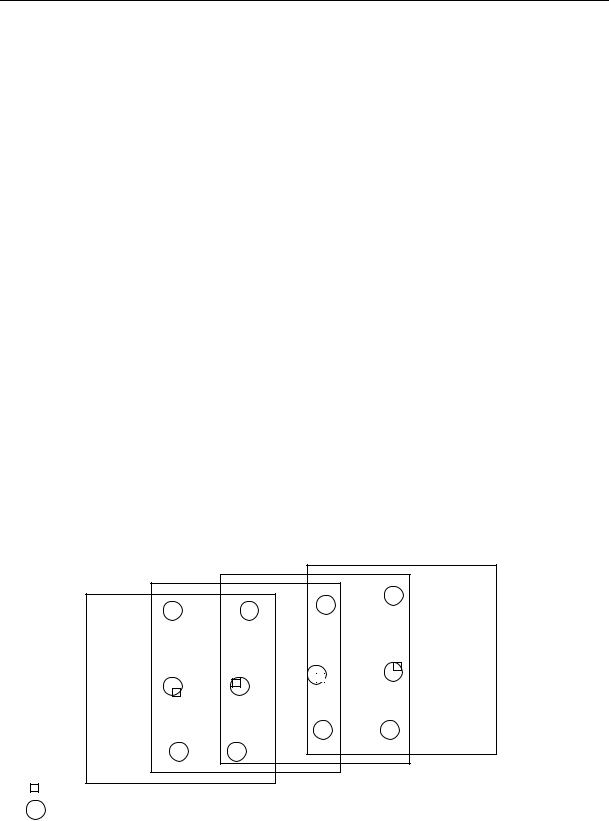
При использовании же только ручного способа для выполнения взаимного ориентирования оптимальным для построения сети фототриангуляции считается расположение связующих точек в 6 стандартных зонах для каждой стереопары (минимум 2 точки на каждую зону).
4
3
2
1
главная точка снимка зоны расположения связующих точек
Рекомендованные зоны для измерения связующих точек внутри маршрутов
Для объединения маршрутов в блок рекомендуется располагать межмаршрутные связующие точки в зонах межмаршрутного перекрытия по обе стороны относительно середины межмаршрутного перекрытия.
|
|
|
© 2009 |
|
34 |
|
|
|
Измерение сети |
ноябрь 2009 |
Рекомендованное расположение связующих точек в зонах межмаршрутного перекрытия
Примечание: в случае использования метода независимых моделей при уравнивании сети, межмаршрутные связующие точки должны быть перенесены в каждом маршруте хотя бы на один соседний снимок, иначе они не будут участвовать в процессе уравнивания этим методом.
4.1 Меню Ориентирование
Для выполнения этапов работ по сбору данных для построения сети фототриангуляции служит меню Ориентирование, которое включает следующие пункты:
•Управление камерами – открывает окно Управление камерами проекта для ввода и редактирования характеристик камер и присвоения их изображениям текущего проекта (дублируется кнопкой  ). Смотри раздел Управление камерами.
). Смотри раздел Управление камерами.
•Внутреннее ориентирование – содержит команды для выполнения внутреннего ориентирования. См. раздел Меню Внутреннее ориентирование.
•Фигуры – позволяет выполнить автоматическое связывание снимков с помощью выделения и сопоставления фигур. Данные сопоставления фигур используются для построения накидного монтажа. См. разделы Создание накидного монтажа и Автоматическое выделение и сопоставление фигур.
•Данные ручного сопоставления – позволяет связать снимки вручную. Данные ручного связывания используются для построения накидного монтажа. См. разделы Создание накидного монтажа и Связывание снимков вручную.
•Каталог точек триангуляции (дублируется  ) – открывает список всех точек триангуляции (опорных, контрольных, связующих) с данными измерений. См. раздел Окно Точки триангуляции.
) – открывает список всех точек триангуляции (опорных, контрольных, связующих) с данными измерений. См. раздел Окно Точки триангуляции.
•Каталог опорных точек (дублируется  ) – открывает список опорных точек с координатами. См. разделы Окно Точки триангуляции и Ввод опорных точек.
) – открывает список опорных точек с координатами. См. разделы Окно Точки триангуляции и Ввод опорных точек.
•Удалить измерение точек – удаляет точки триангуляции, выбранные по определенным критериям. См. раздел Удаление измерений точек.
35 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |

PHOTOMOD 5.0
•Очистить каталог точек – удаляет сразу все точки триангуляции из каталога точек (опорные, контрольные, связующие).
•Автоматическое измерение связующих точек (дублируется  ) – открывает окно параметров для выполнения процедуры автоматического измерения связующих точек. См. раздел Автоматическое измерение связующих точек.
) – открывает окно параметров для выполнения процедуры автоматического измерения связующих точек. См. раздел Автоматическое измерение связующих точек.
•Отчет по взаимному ориентированию (дублируется  ) – открывает отчет с результатами выполнения взаимного ориентирования снимков блока для анализа и устранения ошибок измерений. См. раздел Отчет по взаимному ориентированию.
) – открывает отчет с результатами выполнения взаимного ориентирования снимков блока для анализа и устранения ошибок измерений. См. раздел Отчет по взаимному ориентированию.
•Загрузить точки триангуляции – загружает измеренные точки триангуляции в 2-D окно и открывает окно Точки триангуляции для наcтройки отображения точек. См. раздел Отображение точек в 2D окне.
•Открыть выбранные изображения для измерений (дублируется  ) –
) –
открывает модуль Измерение точек для измерения точек в ручном режиме на выбранных изображениях. См. раздел Измерение точек сети вручную.
•Открыть изображения с маркером (дублируется  ) – открывает модуль
) – открывает модуль
Измерение точек для измерения точек в ручном режиме на изображениях, содержащих позицию маркера. См. раздел Измерение точек сети вручную.
•Открыть маршрутную стереопару (дублируется  ) – открывает модуль
) – открывает модуль
Измерение точек для измерения точек в ручном режиме на выбранной маршрутной стереопаре. См. раздел Измерение точек сети вручную.
•Открыть межмаршрутную стереопару (дублируется  ) – открывает модуль
) – открывает модуль
Измерение точек для измерения точек в ручном режиме на выбранной межмаршрутной стереопаре. См. раздел Измерение точек сети вручную.
•Каталог элементов внешнего ориентирования (дублируется ) – открывает окно с импортированными или введенными вручную элементами внешнего ориентирования. См. раздел Каталог элементов внешнего ориентирования.
) – открывает окно с импортированными или введенными вручную элементами внешнего ориентирования. См. раздел Каталог элементов внешнего ориентирования.
•Выбор подблока – открывает окно Выбор подблока для выбора изображений для уравнивания.
•Уравнивание блока – открывает окно Уравнивание блока (см. Руководство пользователя Уравнивание сети).
•Уравнивание в пакетном режиме – открывает окно Параметры уравнивания,
которое позволяет задать параметры уравнивания и уравнять блок без отображения схемы ошибок уравнивания (см. Руководство пользователя
Уравнивание сети).
•Прямое геопозиционирование – позволяет уравнять блок по импортированным элементам внешнего ориентирования. (см. Руководство пользователя Импорт данных внешнего ориентирования).
•Удалить результаты уравнивания – позволяет удалить данные уравнивания (см. Руководство пользователя Уравнивание сети).
•Импорт внешнего ориентирования – позволяет осуществить импорт элементов внешнего ориентирования при наличие файлов с данными ЭВО для проекта (см. раздел Импорт данных внешнего ориентирования)
© 2009 |
36 |