

PHOTOMOD 5.0
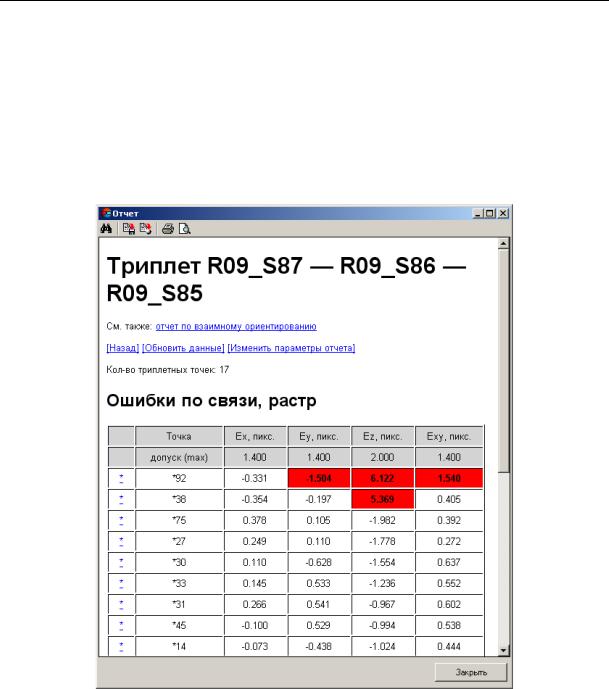
При нажатии на ссылки триплетов в таблицах на первой странице в Отчете по взаимному ориентированию открываются детальный отчет с данными измерений всех триплетных точек в выбранном триплете.
Таблица Ошибки по связи содержит значения триплетных ошибок в плане и по высоте для каждой триплетной точки.
В поле допуск приводятся заданные в окне Параметры отчета по взаимному ориентированию значения допуска на определенный тип ошибки (СКО, средний модуль или максимальная ошибка). Красным цветом выделены триплетные ошибки, превышающие допуски.
Для редактирования измерений триплетной точки в модуле Измерение точек
перейдите по ссылке  . Выбранная точка отображается на 3-х изображениях триплета и выделяется в списке модуля.
. Выбранная точка отображается на 3-х изображениях триплета и выделяется в списке модуля.
Внизу таблицы приводятся итоговые значения триплетных ошибок (СКО, средний модуль и максимальная) по всем триплетным измерениям.
Триплетные ошибки контролируется на тот тип ошибки, который выбран в окне Параметры отчета по взаимному ориентированию.
5. Импорт данных внешнего ориентирования
Элементами внешнего ориентирования являются координаты центров проекций и 3 угла, определяющие в совокупности реальное положение снимков в пространстве.
В случае, если элементы внешнего ориентирования известны с необходимой точностью можно исключить этапы измерения и фототриангуляции и перейти к этапу
© 2009 |
116 |