

3.1 Радиодальномеры

Рисунок 3.23 – Устройство радиодальномера:
ПРД – передатчик; ПРМ – приемник; РНТ – радионавигационная точка.
Дальностьравна
![]() ,
,![]() ,
где
,
где
![]() - время;
- время;
![]() - скорость.
- скорость.
Существует необходимость определения времени. Однако в виду его малости напрямую этого сделать не удается. Поэтому прибегают к косвенному методу,определяя изменения какого-либо параметра электромагнитных колебаний за это время.
3.1.1 Фазовый радиодальномер
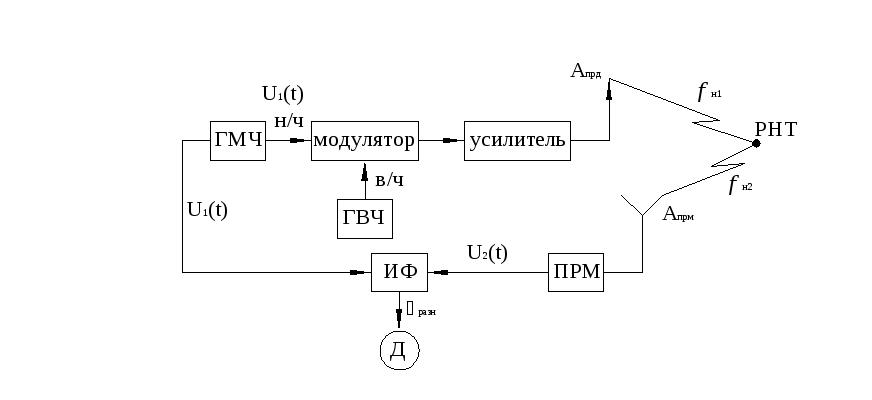
Рисунок 3.24 – Устройство фазового радиодальномера:
ГВЧ – генератор высокой частоты; ГМЧ – генератор модулирующей частоты; ИФ – измеритель фазы; ПРМ – приемник; Д – дальность.
Это самый точный метод определения дальности (до1 см.).
![]() ;
;
![]() ,
где
,
где
![]() - сдвиг по фазе в ретрансляторе и
приемнике.
- сдвиг по фазе в ретрансляторе и
приемнике.
![]() - круговая частота,
- круговая частота,![]() - циклическая частота.
- циклическая частота.
![]() .
.
![]() ,
где
,
где
![]() - можно учесть при тарировке.
- можно учесть при тарировке.
![]()
![]()
![]() ,
,
![]() ,
где
,
где
![]() - масштабный коэффициент.
- масштабный коэффициент.
Ошибка дальностиравняется
![]() .
.
Для ее уменьшения необходимо уменьшать
![]() .
.
При
![]() ,
,![]() .
.
![]() .
.
Возникает искажение фазиз-за наводок
от антенны, для устранения которого
применяют частоту![]() .
.
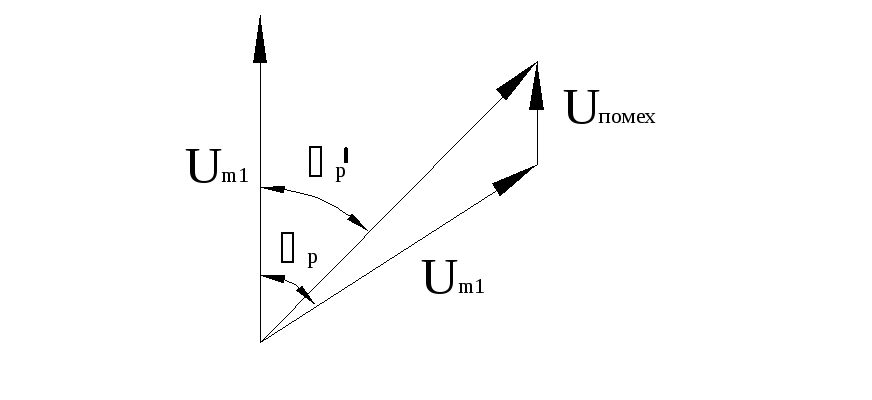
Рисунок 3.25 – Искажения фаз.
3.1.2 Импульсный радиодальномер
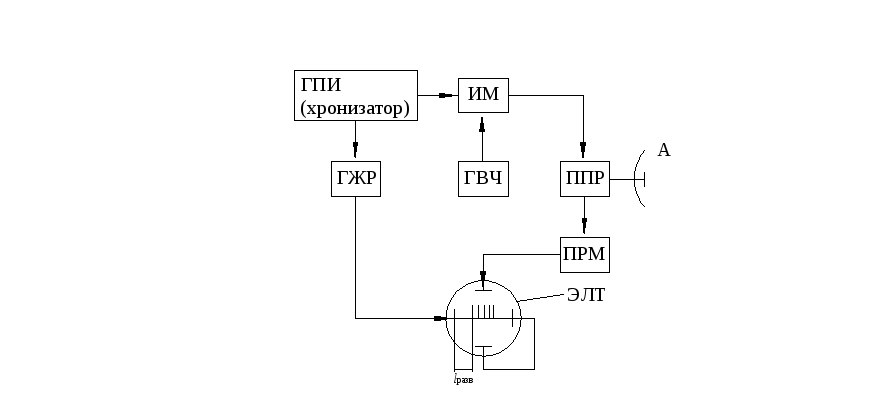
Рисунок 3.26 – Устройство импульсного радиодальномера:
ГПИ – генератор периодических импульсов; ИМ – импульсный модулятор; ГЖР – генератор ждущей развертки; ГВЧ – генератор высокой частоты; ППР – переключатель приема передачи; ПРМ – приемник; ЭЛТ – электронно-лучевая трубка.
![]() ,
где
,
где
![]() ;
;
![]() - скорость развертки.
- скорость развертки.
![]() ,
,
![]() ,
где
,
где
![]() - масштабный коэффициент.
- масштабный коэффициент.
Для уменьшения ошибки дальности![]() необходимо уменьшать масштабный
коэффициент
необходимо уменьшать масштабный
коэффициент![]() .
.
Максимальная дальность определяется размерами электронно-лучевой трубки.
3.2 Радиовысотомеры
3.2.1 Частотный радиовысотомер

Рисунок 3.27 – Устройство частотного радиовысотомера:
ГМЧ – генератор модулирующей частоты; ГВЧ – генератор высокой частоты; ИЧ – измеритель частоты; ПРМ – приемник; РНТ – радионавигационная точка; Д – дальность.

Рисунок 3.28 –
![]()
![]() ,
где
,
где
![]() - девиация частоты;
- девиация частоты;
![]() ;
;![]() .
.
![]()
Дальностьравна
![]()
![]() -
масштабный множитель.
-
масштабный множитель.
Модулирующую частоту
![]() нельзя делать большой, т.к. сжимается
период модуляции
нельзя делать большой, т.к. сжимается
период модуляции![]() ,
а в результате сжимается и диапазон
измерения высот. Увеличение модулирующей
частоты ведут до определенных пределов
с однозначными отсчетами.
,
а в результате сжимается и диапазон
измерения высот. Увеличение модулирующей
частоты ведут до определенных пределов
с однозначными отсчетами.
3.3 Угломерные устройства
3.3.1 Радиопеленгаторы
Амплитудные методы определения угловых координат:
метод максимумов;
метод минимумов;
метод сравнения;
метод равносигнальной зоны.
а) Метод максимумов

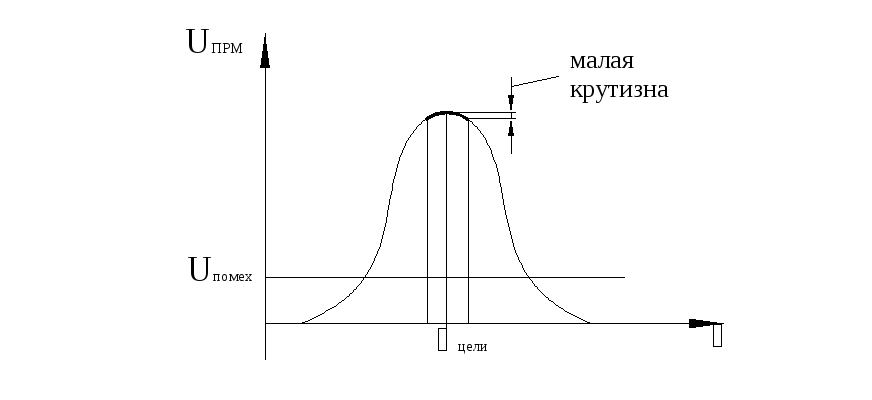
Рисунок 3.29 – Диаграмма направленности Рисунок 3.30 – Амплитудная характеристика
для определения
угловых координат
– график
зависимости
![]() .
.
методом максимумов.
Малая крутизна пеленгационной
характеристики в районе максимума,
из-за которой точность определения
угловой координаты
![]() не очень высокая.
не очень высокая.
б) Метод минимумов
Этот метод лежит в основе радиокомпасов.
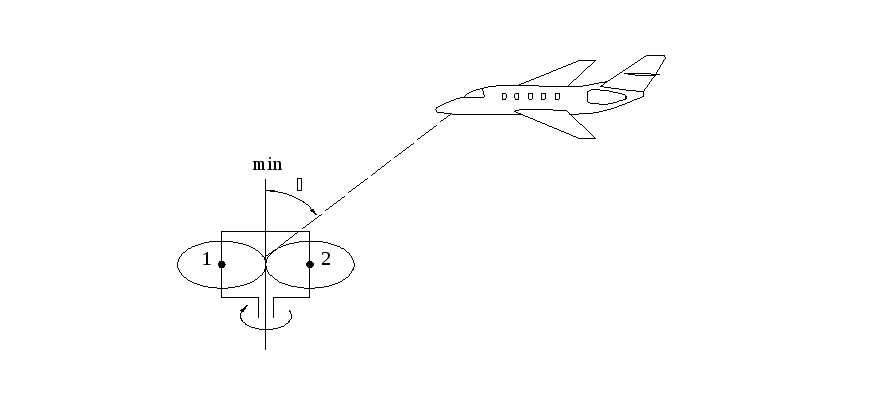
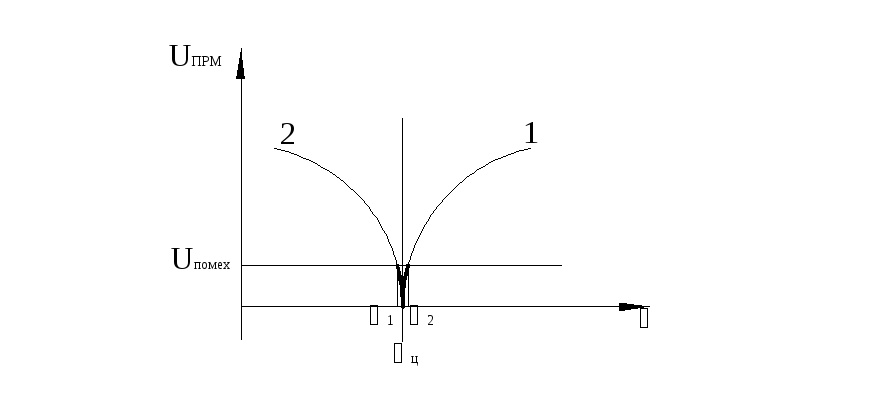
Рисунок 3.31 –
Диаграмма направленности Рисунок
3.32 – График зависимости
![]() .
.
для определения угловых координат
методом минимумов.
Поворот антенны происходит до тех пор, пока сигнал не пропадет.
![]() - поворот антенны.
- поворот антенны.
в) Метод сравнения

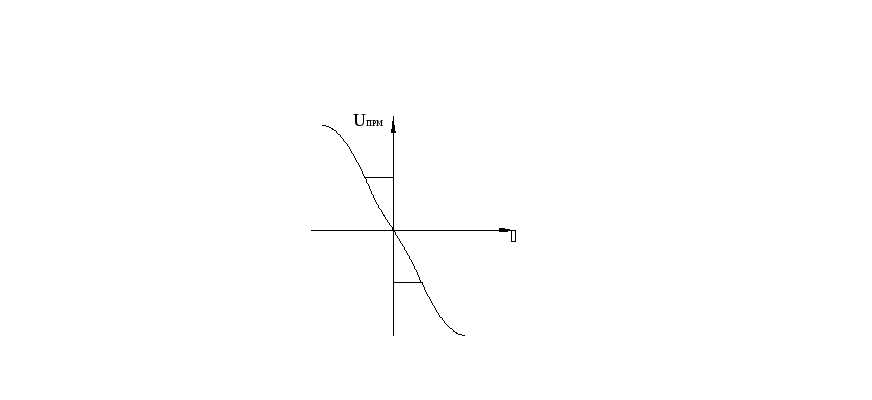
Рисунок 3.33 –
Двухлепестковая диаграмма Рисунок
3.34 – График зависимости
![]() .
.
направленности для определения угловых
координат методом сравнения.
![]() .
.
г) Метод равносигнальной зоны
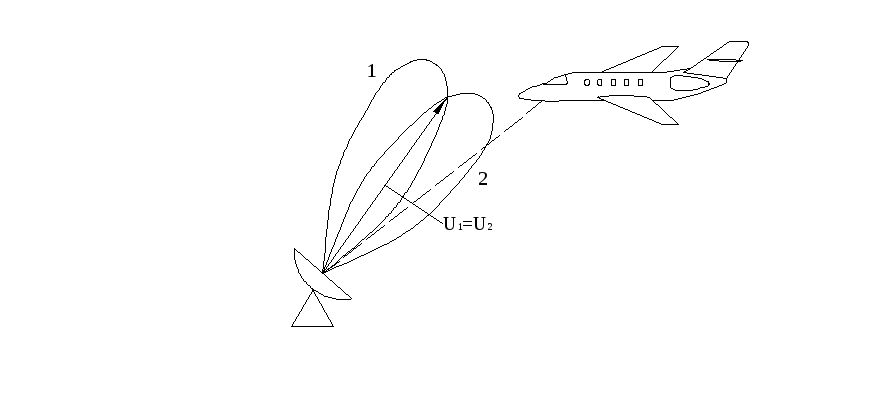
Рисунок 3.35 – Двухлепестковая диаграмма направленности для определения угловых координат методом равносигнальной зоны.
3.3.2 Фазовые радиопеленгаторы

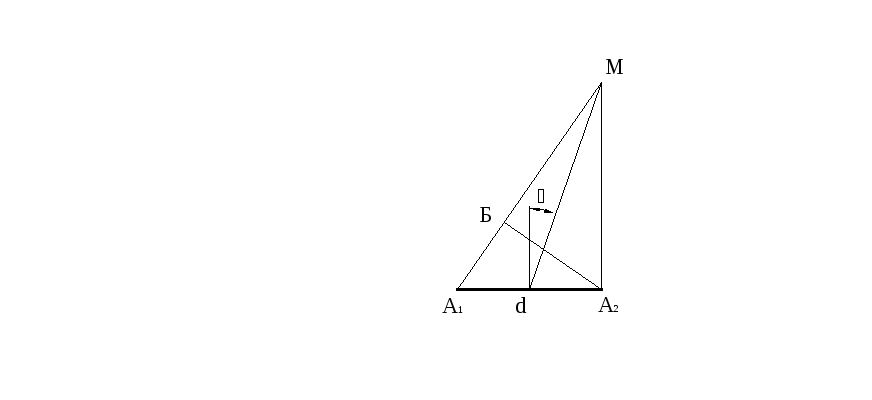
Рисунок 3.36 –
Устройство фазового пеленгатора:
Рисунок 3.37 – Определение угла
![]() .
.
УВЧ – усилитель высокой частоты;
РНП – радионавигационный передатчик (пеленгатор).
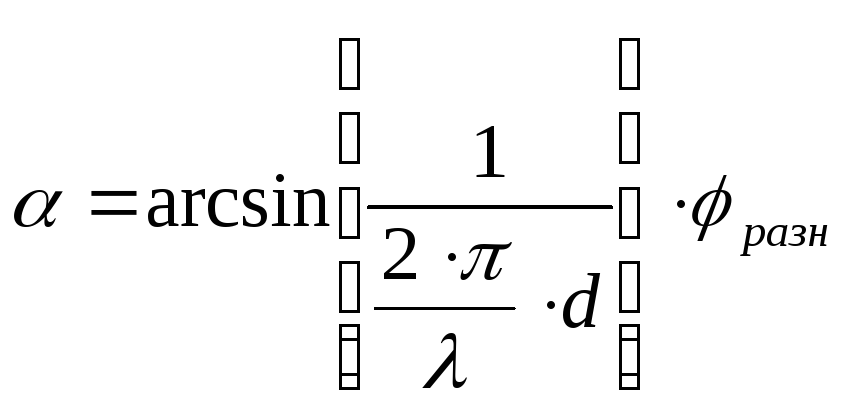
![]() ,
,![]() ,
,![]() .
.
![]() ,
где
,
где
![]() ,
,![]() .
.
![]() ,
,![]() ;
;
![]() ;
;
 .
.
![]() ,
,
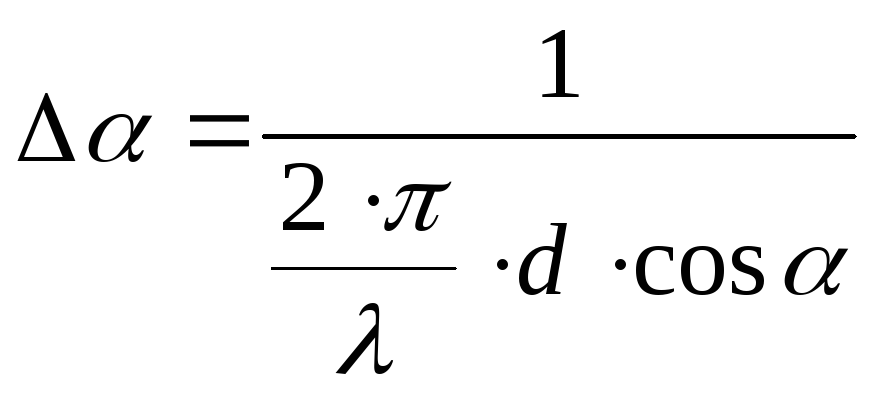 .
.
Если
![]() - ошибка угла направления, при
- ошибка угла направления, при![]() или
или![]() .
.
Реально получить большую фазу на борту ЛА нельзя.
3.3.3 Фазовый радиомаяк
Фазовый радиомаяк – это наземное
устройство, состоящее из стержней –
рефлекторов, расположенных через каждые![]() ,
и двух цилиндров из радиопрозрачного
материала.
,
и двух цилиндров из радиопрозрачного
материала.
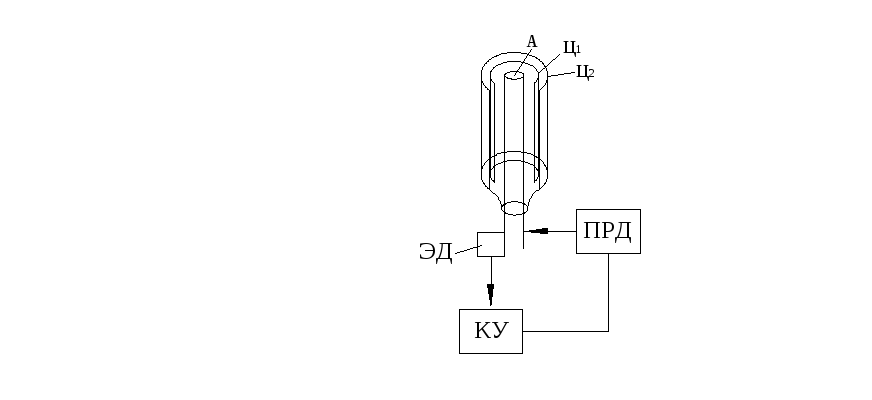
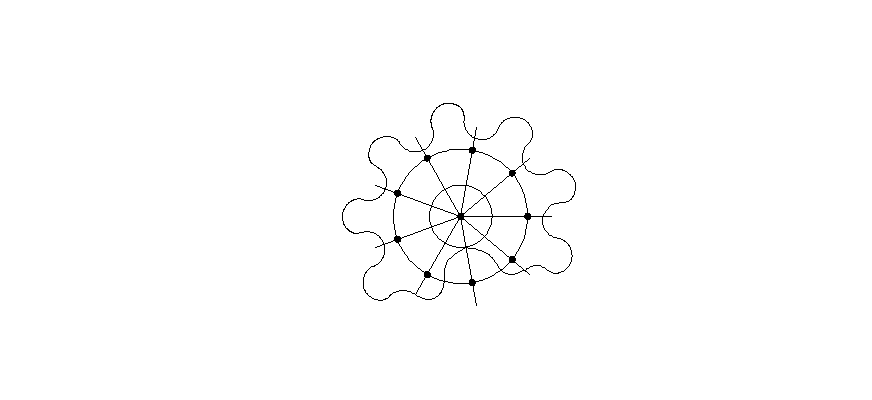
Рисунок 3.38 – Устройство фазового радиомаяка: Рисунок 3.39 – Кардиоида.
ЭД – электродвигатель; ПРД – передатчик;
КУ – кодирующее устройство.

Рисунок 3.40 – График
зависимости
![]() :
:
![]() - период
промодулированного сигнала.
- период
промодулированного сигнала.
Точность определения азимутадо![]() .
Используютсядециметровые волны.
.
Используютсядециметровые волны.
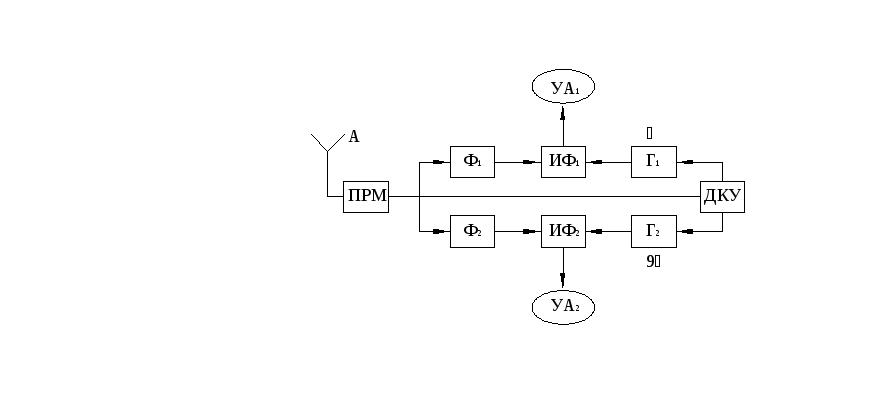
Рисунок 3.41 – Устройство фазового радиомаяка:
ПРМ – приемник; Ф – фильтр; ДКУ – декодирующее устройство.
Принцип действия
Когда максимальные кардиоиды направлены
на север, кодирующее устройство модулирует
передатчик серией импульсов, служащих
началом отсчета. Через каждые
![]() ,
когда микромаксимум совпадает с
направлением на север, посылаются
очередные серии импульсов, отличающиеся
друг от друга их количеством. Принятые
на борту сигналы детектируются, поступают
на два фильтра, разделяющие их на частоты
,
когда микромаксимум совпадает с
направлением на север, посылаются
очередные серии импульсов, отличающиеся
друг от друга их количеством. Принятые
на борту сигналы детектируются, поступают
на два фильтра, разделяющие их на частоты![]() и
и![]() .
Колебания с частотой
.
Колебания с частотой![]() служат для грубого отсчета, а
служат для грубого отсчета, а![]() - для точного.
- для точного.