

3.3.2 Приборы для измерения скорости вращения вала ад
По принципу действия приборы для измерения скорости вращения вала АД делятся на:
механические (центробежные);
магнитоиндукционные;
электрические;
оптические.
а) Оптический метод измерения скорости вращения вала АД
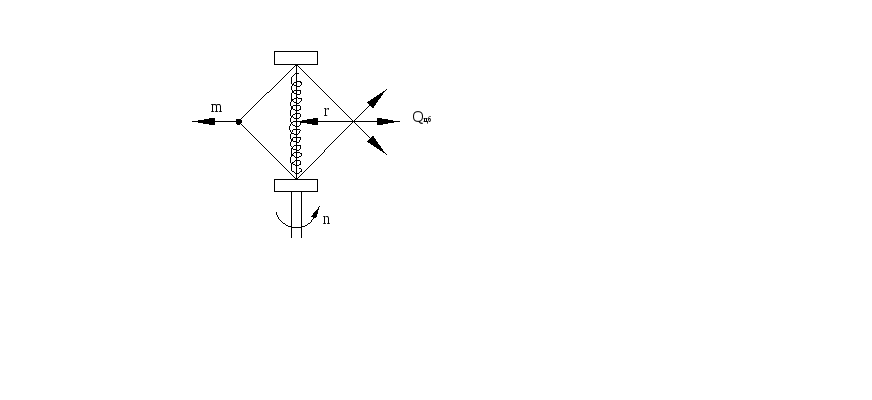
Рисунок 2.23 – Схема для измерение скорости вращения вала АД оптическим методом.
![]() .
.
3.4 Приборы для измерения количества топлива
Вне зависимости от принципа действия все топливомерыизмеряют высоту топлива в баке.
По принципу действия топливомеры бывают:
механические;
электромеханические;
электрические;
ультразвуковые;
радиочастотные;
радиационные.
Также для определения количества топлива в баке используют системы программного измерения (управления) топливом (СПИТ и СПУТ).
3.4.1 Механический топливомер
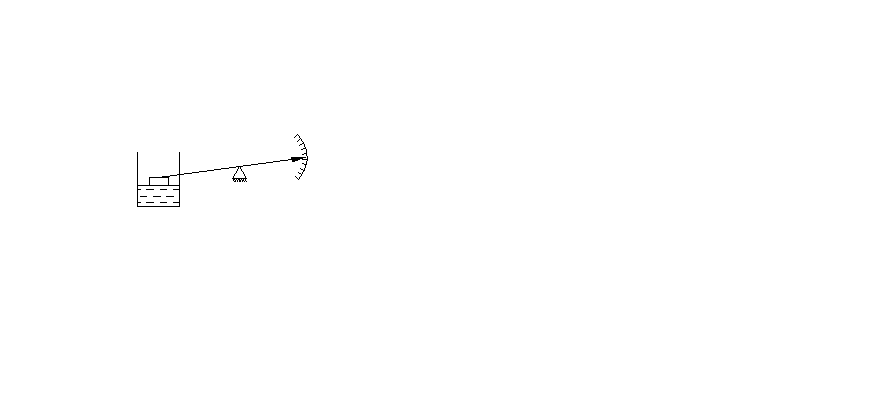
Рисунок 2.24 – Механический топливомер.
3.4.2 Электромеханический топливомер
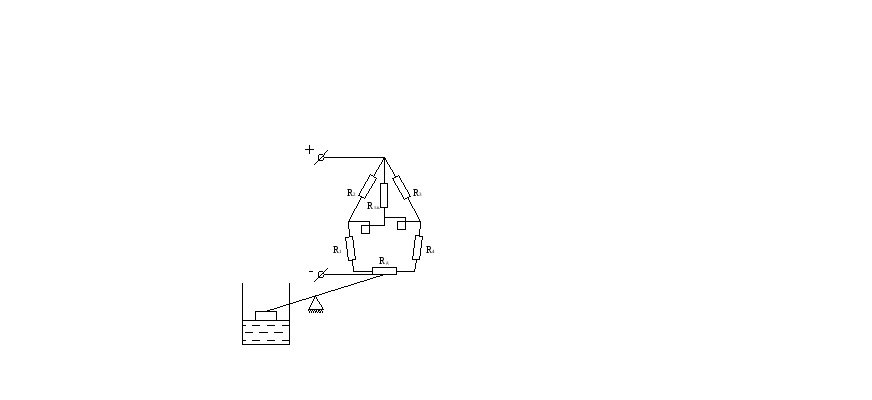
Рисунок 2.25 – Электромеханический топливомер.
а) Суммирующий электромеханический топливомер
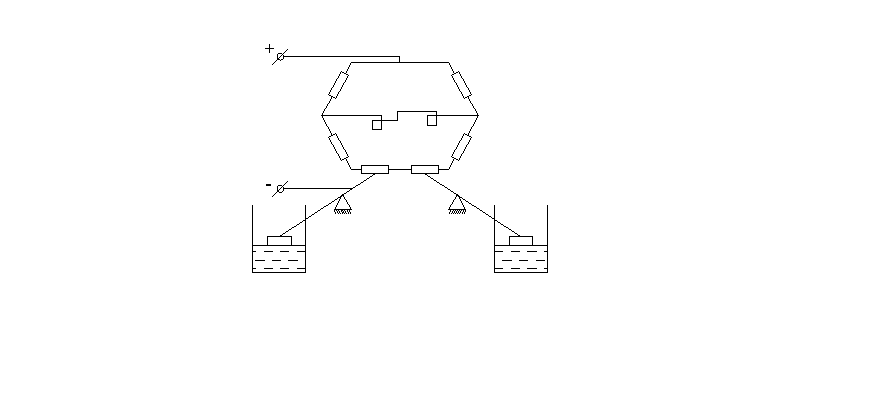
Рисунок 2.26 – Суммирующий электромеханический топливомер.
![]() ;
;![]() .
.
б) Электроемкостный топливомер

Рисунок 2.27 – Электроемкостный топливомер.
 ,
где
,
где
![]() - внутренний диаметр наружной трубки;
- внутренний диаметр наружной трубки;
![]() - наружный диаметр внутренней трубки.
- наружный диаметр внутренней трубки.
![]() .
.
![]() ,
,![]() .
.
Емкость датчикапри заправленном баке в 2 раза больше, чем при пустом.Профилирование датчиковосуществляется путем вырезов во внутренних трубках.
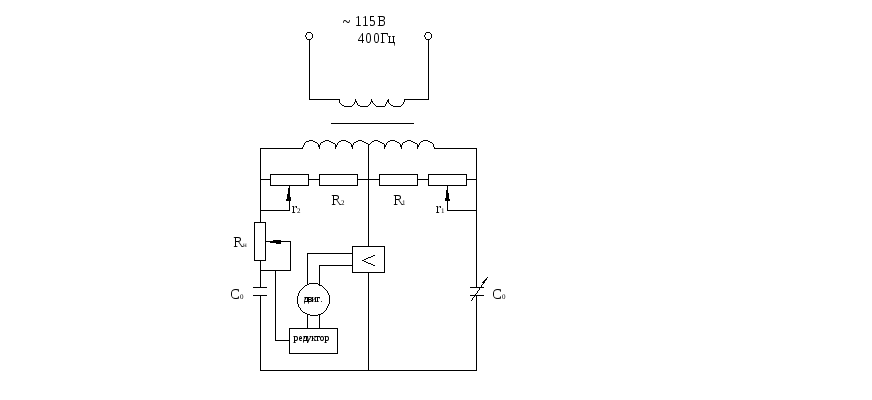
Рисунок 2.28 – Схема самоуравновешивающегося моста переменного тока.
![]() .
.
При изменении количества топлива
меняется емкость
![]() ,
в результате чего в диагонали моста
возникает напряжение, которое усиливается
и поступает на малый двигатель. Двигатель
через редуктор приводит в действие
стрелку указателя и одновременно
перемещает щетку потенциометра
,
в результате чего в диагонали моста
возникает напряжение, которое усиливается
и поступает на малый двигатель. Двигатель
через редуктор приводит в действие
стрелку указателя и одновременно
перемещает щетку потенциометра![]() ,
приводя мостовую схему в состояние
равновесия.
,
приводя мостовую схему в состояние
равновесия.
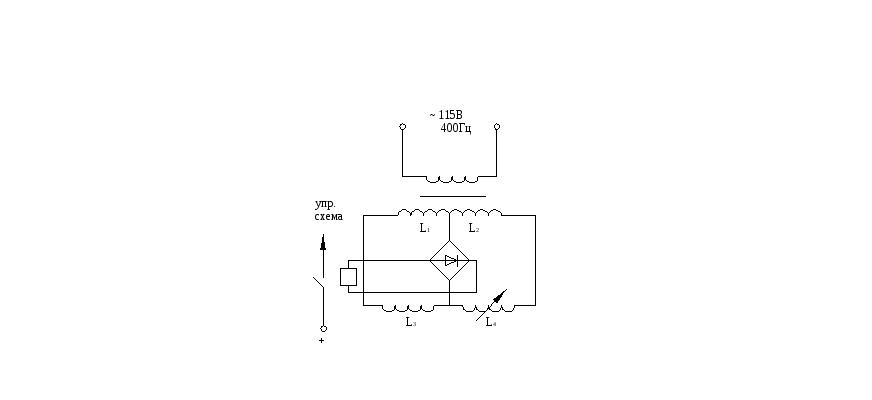
Рисунок 2.29 – Схема блока автоматики.
3.5 Приборы для измерения расхода топлива

Рисунок 2.30 – Струя топлива.
![]() ;
;![]() .
.
3.5.1 Методы определения расхода топлива
Механический.
Гидромеханический.
Турбинный.
Тепловой.
Изотопный.
Индукционный.
а) Механический метод определения расхода топлива
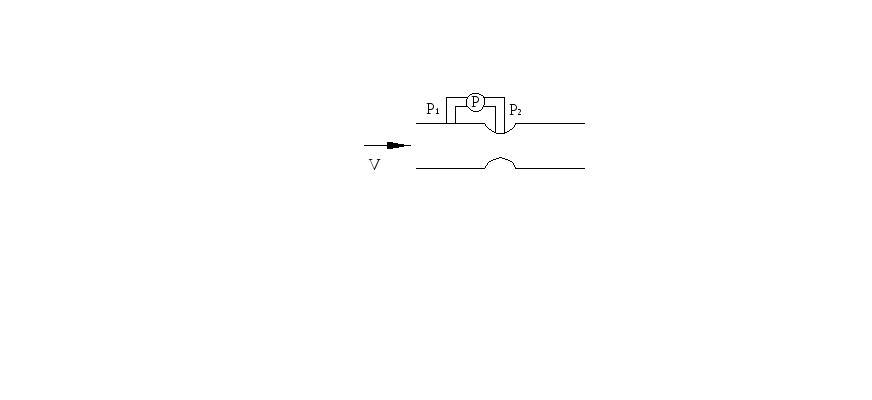
Рисунок 2.31 – Механический метод определения расхода топлива.
Принцип действия
Основан на измерении разницы давлений
![]() ,
при
,
при![]() .
.
б) Гидромеханический метод определения расхода топлива
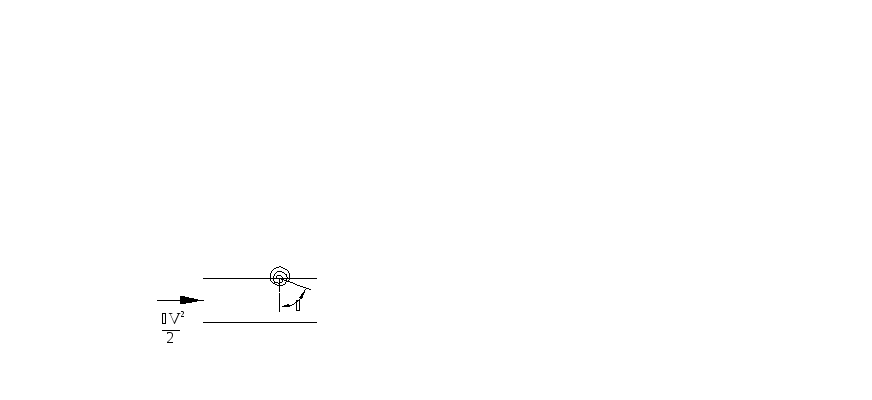
Рисунок 2.32 – Гидромеханический метод определения расхода топлива.
![]() .
.
в) Индукционный метод определения расхода топлива
Применяется только для электропроводящих токов.
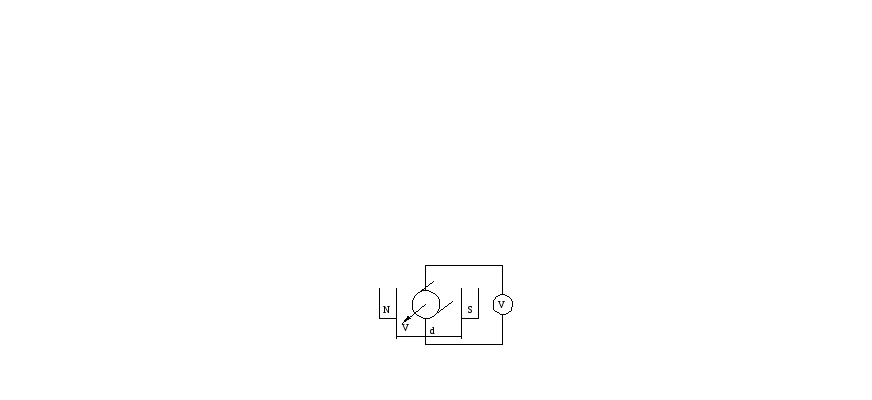
Рисунок 2.33 – Индукционный метод определения расхода топлива.
![]() .
.
г) Турбинный метод определения расхода топлива

Рисунок 2.34 – Турбинный метод определения расхода топлива.
![]() ,
,![]() ,
,![]() .
.
3.6 Приборы для измерения вибрации

Рисунок 2.35 – Диаграмма колебаний.
![]() ,
,![]() ,
,![]() .
.
![]() -виброскорость;
-виброскорость;
![]() -виброускорение;
-виброускорение;
![]() ;
;![]() -виброперегрузка.
-виброперегрузка.

Рисунок 2.36 – Схема работы измерителей вибрации.
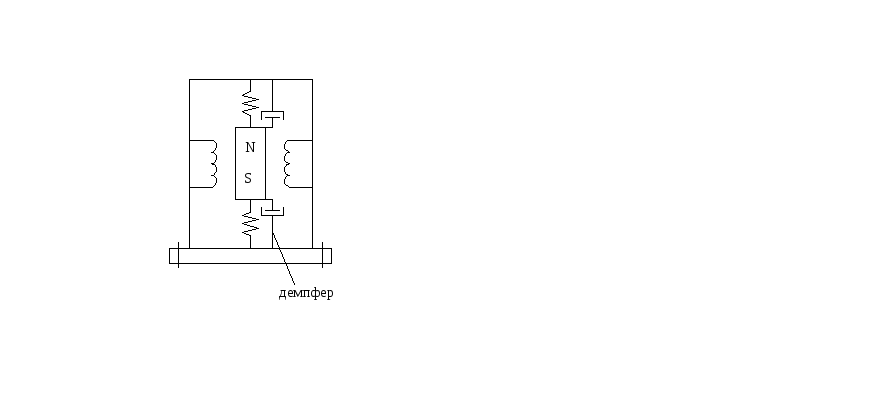
Рисунок 2.36 – Устройство датчика вибраций.
Собственная частота датчика вибраций
равна
![]() .
.
4 Пилотажно-навигационные приборы
4.1 Введение в теорию гироскопических приборов
Гироскоп («гиро»- вращение,«скоп»- измерение) – это быстровращающееся симметричное тело, которое может изменять угловые положения оси симметрии.

Рисунок 2.37 – Принципиальная схема 3х степенного гироскопа.
![]() - главная ось гироскопа;
- главная ось гироскопа;
![]() ,
,![]() - экваториальные оси гироскопа.
- экваториальные оси гироскопа.
Астатический гироскопили безразличный к начальному положению осей – это гироскоп, у которого точка О пересечения 3х осей совпадает с центром масс гироскопа.
Свободный (идеальный) гироскоп– это астатический гироскоп, на который не действуют никакие внешние силы, в т.ч. и силы трения в осях карданного подвеса.
Тяжелый гироскоп (гироскопический маятник)– это гироскоп, у которого центр масс не совпадает с точкой пересечения 3х осей.