

2.1.2 Логометрическая эдп
Логометр– прибор, измеряющий отношение токов, пробегающих по его рамкам.
![]() .
.
а) Схема параллельного включения логометров
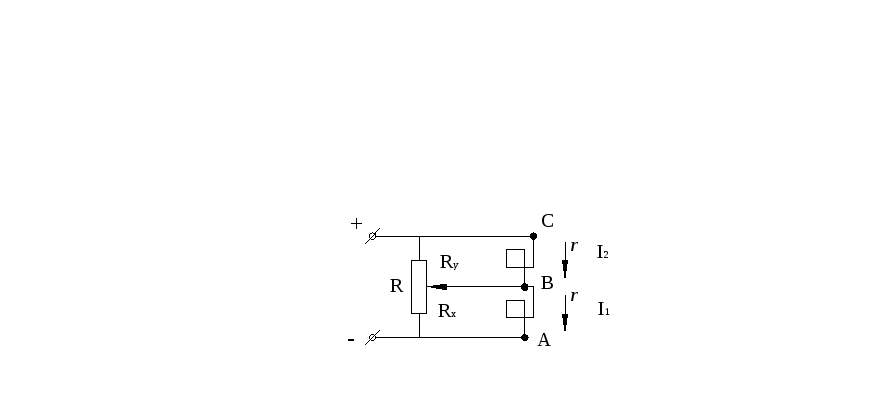
Рисунок 2.6 – Схема параллельного включения логометров.
![]() ,
где
,
где
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
![]() .
.
При
![]()
![]() ,
при
,
при![]()
![]() ,
при
,
при![]()
![]() .
.
Достоинства схемы:
питающее напряжение не влияет на показания прибора.
Недостатки схемы:
в случае нарушения контакта между щеткой и потенциометром, стрелка устанавливается посередине шкалы и не ясно, действительное это значение, или это неисправность.
б) Дифференциальная схема последовательного включения логометров
![]() .
.
![]() ,
,![]() ,
,![]() .
.
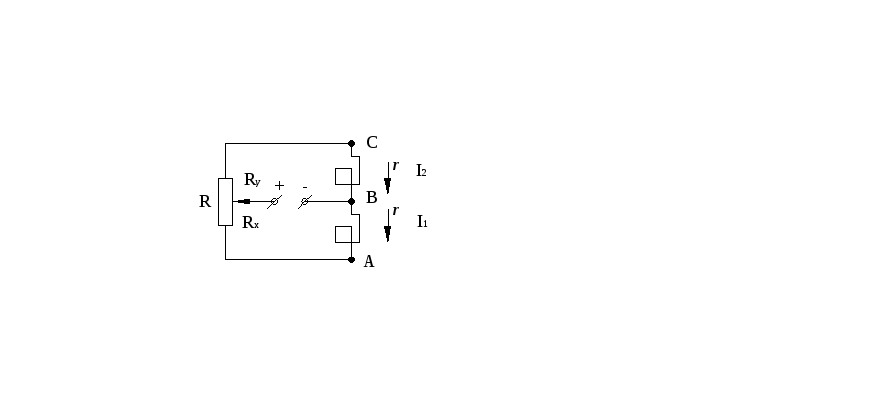
Рисунок 2.7 – Дифференциальная схема последовательного включения логометров.
Достоинства схемы:
схема последовательного включения логометров позволяет устранить недостатки схема параллельного включения логометров.
Недостатки схемы:
сужение диапазона измерений.
в) Компенсационная схема ЭДП с сервоприводом

Рисунок 2.8 – Компенсационная схема ЭДП с сервоприводом:
МИД – малый инерционный двигатель.
При
![]() ,
если
,
если![]()
![]() .
.
При
![]() ,
если
,
если![]()
![]() .
.
2.2 ЭДП на постоянном токе
Сельсин– это миниатюрная электромашина, у которой при повороте ротора на определенный угол, в статорных обмотках наводится ЭДС, пропорциональная углу поворота ротора.

Рисунок 2.9 – Датчик угла поворота.
![]() ;
;
![]() ;
;
![]() .
.
2.2.1 Самосинхронизирующееся сельсинная ЭДП
Самосинхронизация сельсинное ЭДП
– это автоматическое отслеживание
ротором![]() углового положения ротора
углового положения ротора![]() .
.
Самосинхронизирующееся ЭДПпоэтому, что само устанавливает угол поворота.
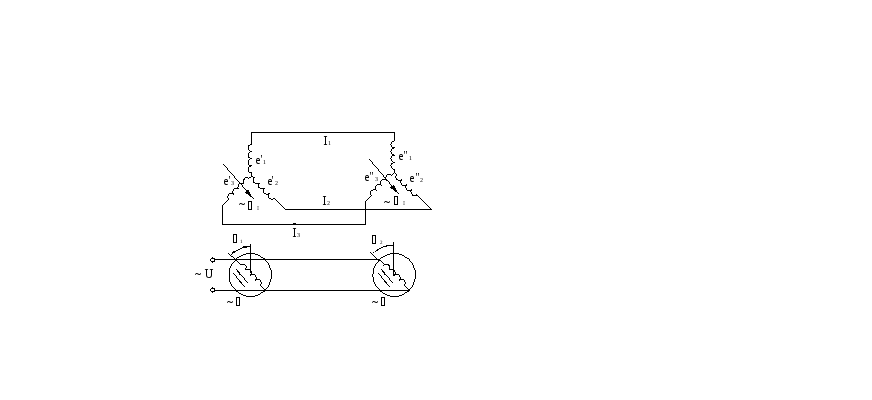
Рисунок 2.10 – Схема самосинхронизирующейся сельсинной ЭДП.
Если
![]() ,
то
,
то![]() ,
,![]() ,
,![]() .
.
Если
![]() ,
то
,
то![]() ,
,![]() ,
,![]() .
.
Принцип действия сельсина при индикаторном режиме работы
В случае если углы поворота роторов не
равны, то не равны и соответствующие
ЭДС, наводимые в обмотках
![]() и
и![]() .
В результате этого по соединительным
проводам и статорным обмоткам потекут
уравнительные токи, которые создадут
суммарный магнитный поток
.
В результате этого по соединительным
проводам и статорным обмоткам потекут
уравнительные токи, которые создадут
суммарный магнитный поток![]() .
.
В результате взаимодействия суммарного
магнитного потока
![]() с
магнитными потоками роторов
с
магнитными потоками роторов![]() возникает электромагнитный момент,
который стремится привести роторы в
согласованное положение.
возникает электромагнитный момент,
который стремится привести роторы в
согласованное положение.
Поскольку ротор
![]() находится в заторможенном режиме, то
повернется ротор
находится в заторможенном режиме, то
повернется ротор![]() ,
т.е. произойдет автоматическое отслеживание
ротором
,
т.е. произойдет автоматическое отслеживание
ротором![]() углового положения ротора
углового положения ротора![]() .
.
2.2.2 Компенсационная сельсинная эдп с исполнительным приводом
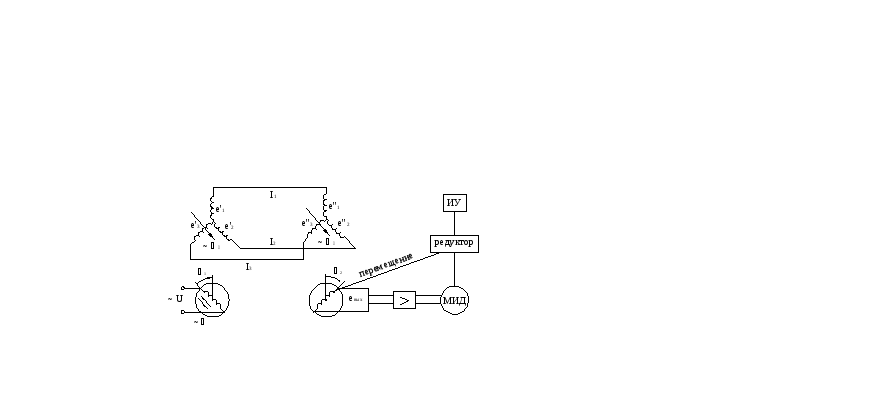
Рисунок 2.11 – Схема компенсационной сельсинной ЭДП с исполнительным приводом:
ИУ – исполнительное устройство.
Принцип действия сельсина при трансформаторном режиме работы
При повороте ротора
![]() на некоторый угол
на некоторый угол![]() в статорных обмотках
в статорных обмотках![]() наводится ЭДС. Под действием этих ЭДС
по статорным обмоткам
наводится ЭДС. Под действием этих ЭДС
по статорным обмоткам![]() и
и![]() и
соединительным проводам начинают
протекать, создающие суммарный магнитный
переменный поток
и
соединительным проводам начинают
протекать, создающие суммарный магнитный
переменный поток![]() .
.
В результате этот суммарный магнитный
переменный поток
![]() пронизывает
роторную обмотку
пронизывает
роторную обмотку![]() и наводит в ней выходную ЭДС, которая
усиливается и поступает на МИД, который
через редуктор поворачивает ротор
и наводит в ней выходную ЭДС, которая
усиливается и поступает на МИД, который
через редуктор поворачивает ротор![]() до согласованного положения, одновременно
поворачивая исполнительное устройство.
до согласованного положения, одновременно
поворачивая исполнительное устройство.