

2.5. Преобразование прямоугольных координат на плоскости
Пусть на плоскости
даны две системы прямоугольных координат,
заданные реперами R
=![]() иR1
=
иR1
=![]() ,О1(х0,
у0)R
и
,О1(х0,
у0)R
и
![]() (рис.
77).
(рис.
77).
|
Пусть М(х,
у)R
и М(х1,
у1
1) Реперы R
=
|
Рис. 24 |
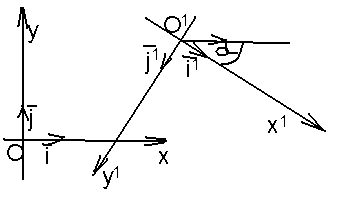
одинаково
ориентированы. Так как
![]() пр
пр![]() ,
пр
,
пр![]() )
= (cos,
sin)
и
)
= (cos,
sin)
и
![]() пр
пр![]() ,
пр
,
пр![]() )
= (sin,
cos),
то формулы (63) будут иметь вид
)
= (sin,
cos),
то формулы (63) будут иметь вид
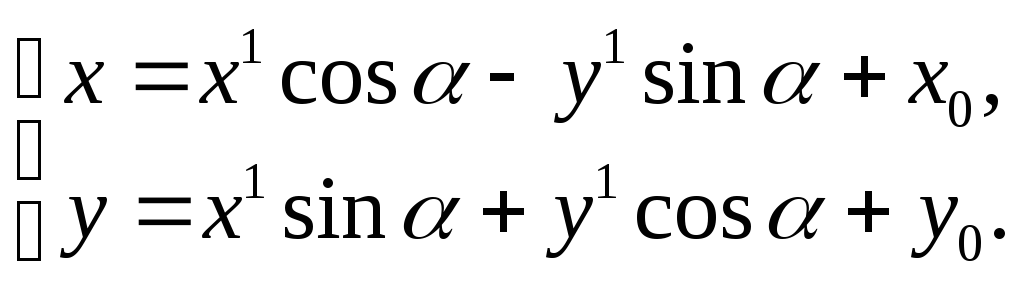 (64)
(64)
2) Реперы R
=
![]() иR1
=
иR1
=
![]() противоположно ориентированы (рис.24).
В этом случае формулы (63) примут вид
противоположно ориентированы (рис.24).
В этом случае формулы (63) примут вид
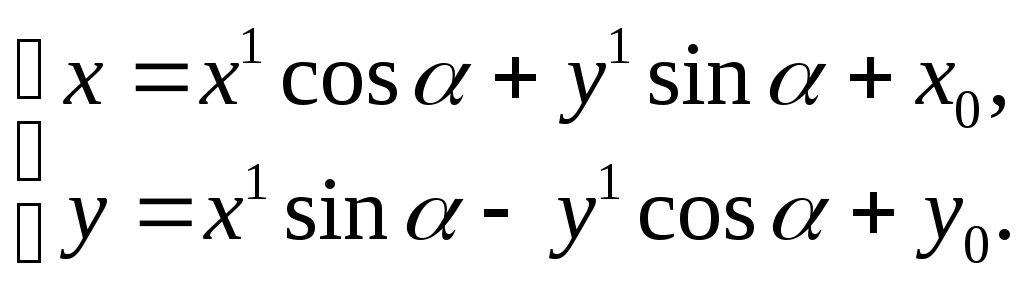 (65)
(65)
2.6. Полярные координаты на плоскости
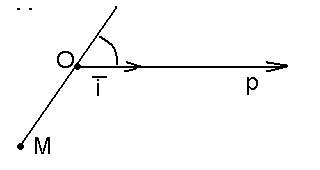
Определение
18. Полярным
репером
называется совокупность фиксированных
точки и единичного вектора Р
=
![]() .
ТочкаО
называется
полюсом
(или началом полярной системы координат).
.
ТочкаО
называется
полюсом
(или началом полярной системы координат).
Точка О
вместе с вектором
![]() определяет луч, который называетсяполярной
осью.
определяет луч, который называетсяполярной
осью.
|
Пусть
М –
произвольная точка плоскости,
|
Рис. 25 |

и только одну. Но
любая точка плоскости имеет бесконечно
много пар полярных координат. Действительно,
если М (,
),
то М (,
+ 2к),
где к
– любое целое число. Точка О
– единственная
точка, для которой полярным углом может
быть любой угол. Полярный репер Р
=
![]() и ортонормированный реперR
=
и ортонормированный реперR
=
![]() называются соответствующими друг другу.
ЕслиМ (,
)Р
и М(х,
у)R,
то x
= cos,
y
= sin.
В полярных координатах
может
принимать все возможные действительные
значения, а
0. Если отказаться от условия, что
0, то мы получим обобщённые
полярные координаты.
называются соответствующими друг другу.
ЕслиМ (,
)Р
и М(х,
у)R,
то x
= cos,
y
= sin.
В полярных координатах
может
принимать все возможные действительные
значения, а
0. Если отказаться от условия, что
0, то мы получим обобщённые
полярные координаты.
Пусть М (, ). Если 0, то обобщенные полярные координаты совпадают с обычными полярными координатами. Если же 0, то точка М определяется так: проведём луч под углом к полярной оси и
|
на дополнительном к нему луче отложим отрезок ОМ, длина которого равна || (рис. 26).
Задача
13. Постройте
точки, заданные в полярной системе
координат А(3,
|
Рис. 26 |
|
Решение.
Для построения точки А
проводим луч с началом в точке О
под углом |
Рис. 27 |
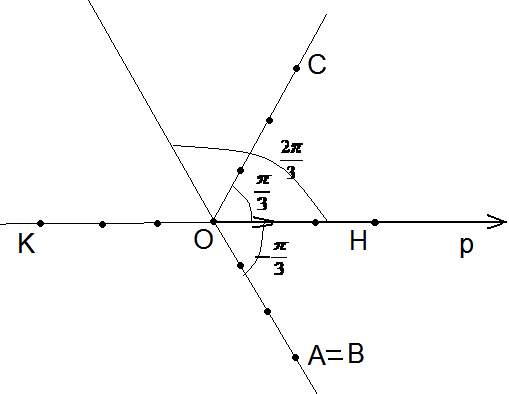
откладываем от
точки О
отрезок длины 3
= 3, получаем , что В
= А.
Для построения точки С
проводим
луч под углом
![]() к полярной оси и на нём откладываем
отрезок длины 3. ЛучОК
образует с осью угол
и имеет
длину 3. Луч ОН
сонаправлен
с осью и имеет длину 3.
к полярной оси и на нём откладываем
отрезок длины 3. ЛучОК
образует с осью угол
и имеет
длину 3. Луч ОН
сонаправлен
с осью и имеет длину 3.
Пусть полярная
система координат задана репером Р
=
![]() ,
а прямоугольная система координат
задана реперомR
=
,
а прямоугольная система координат
задана реперомR
=
![]() (т.е.
начало координат у них одно и то же и
полярная ось совпадает с осью абсцисс).
ПустьМ
– произвольная точка плоскости, М
(,
)Р
и М (х,
у)R.
Так как х
= пр
(т.е.
начало координат у них одно и то же и
полярная ось совпадает с осью абсцисс).
ПустьМ
– произвольная точка плоскости, М
(,
)Р
и М (х,
у)R.
Так как х
= пр![]() и у =
пр
и у =
пр![]() ,
то
,
то
![]() Из этих формул следует, что
Из этих формул следует, что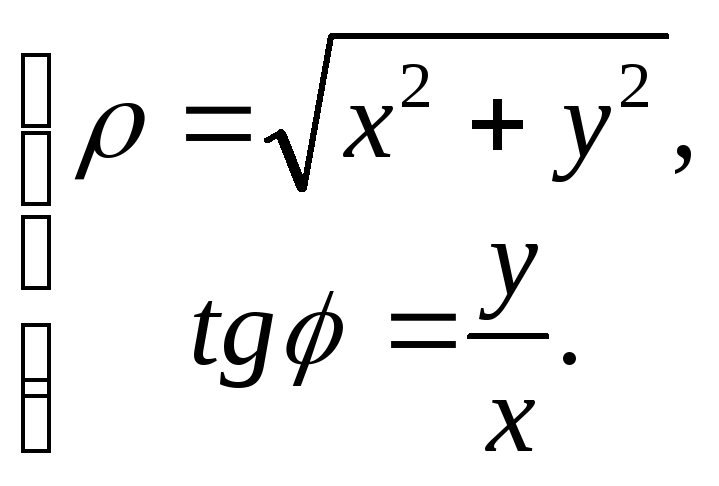 Получили связь между прямоугольными
декартовыми координатами точки иеё
соответствующими полярными координатами.
Получили связь между прямоугольными
декартовыми координатами точки иеё
соответствующими полярными координатами.