

4.2. Энергетическая диаграмма. Потери мощности
Энергетическая диаграмма несимметричного двухфазного микродвигателя показана на рис. 4.2.
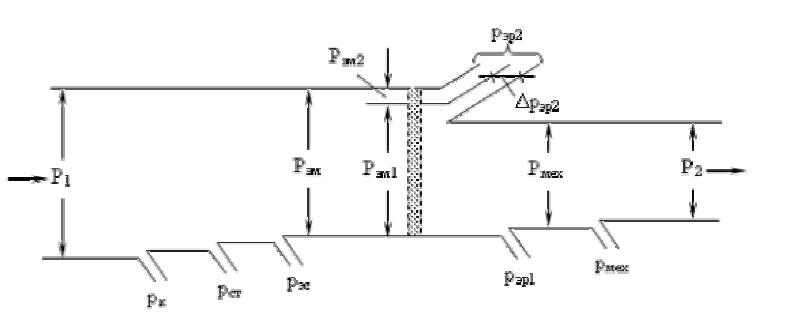
Рис. 4.2. Энергетическая диаграмма несимметричного двухфазного асинхронного микродвигателя
Здесь
обозначено:
![]() –
потери в конденсаторе.
–
потери в конденсаторе.
![]() .
Активное сопротивление конденсатора
.
Активное сопротивление конденсатора
![]() обычно очень мало, так что потерями в
нем можно пренебречь,
обычно очень мало, так что потерями в
нем можно пренебречь,
![]() –
потери в стали.
–
потери в стали.
При
эллиптическом поле они равны сумме
потерь встали от прямого
![]() и обратного
и обратного
![]() полей [1]:
полей [1]:
![]() .
.
Потерями
в стали ротора при скольженьях, близких
к номинальному, можно пренебречь,
поскольку частота перемагничивания
ротора весьма небольшая
![]() .
.
Потери в стали статора от поля прямой последовательности рассчитывают обычным порядком [4]. Они пропорциональны квадрату индукции и частоте в степени 1,3:
![]() .
(4.8)
.
(4.8)
Потери в стали статора от поля обратной последовательности
![]() ,
(4.9)
,
(4.9)
где
![]() ,
,
![]() – ЭДС в обмотке
– ЭДС в обмотке
![]() от поля прямой и обратной последовательностей.
от поля прямой и обратной последовательностей.
Потери в обмотках А и В статора
![]() (4.10)
(4.10)
В формуле (4.10) должны присутствовать токи статора, полученные с учетом потерь в стали. Эти токи определяются следующим образом [1,5].
Для покрытия потерь в стали двигатель потребляет из сети дополнительный ток, что приводит к увеличению активных составляющих токов статора. Эти увеличения можно рассчитать по следующим формулам:
![]() ;
;
![]() ;
(4.11)
;
(4.11)
![]() ,
,
![]() .
(4.12)
.
(4.12)
Прибавляя "добавки" к активным составляющим токов, рассчитанным без учета потерь в стали, получим полные токи фаз статора:
 ;
;
![]() ;
;
![]() ;
;
![]() .
(4.13)
.
(4.13)
Здесь индексы 1 и 2 означают прямую и обратную последовательности.
Потери в обмотке ротора можно определить через электромагнитную мощность (1.28) и скольжение ротора
![]() .
(4.14)
.
(4.14)
Из
энергетической диаграммы видно, что
электрические потери в обмотке ротора
от токов обратной последовательности
![]() больше
электромагнитной мощности обратной
последовательности
больше
электромагнитной мощности обратной
последовательности
![]() ,
чего казалось бы не должно быть. Этот
парадокс объясняется следующим образом.
,
чего казалось бы не должно быть. Этот
парадокс объясняется следующим образом.
По
отношению к полю обратной последовательности
машина работает в режиме электромагнитного
тормоза, поэтому вся энергия (![]() )
превращается в тепло, т.е. в потери в
обмотке ротора. Но для вращения ротора
против поля требуется еще и механическая
энергия, источником которой является
электромагнитная мощность прямой
последовательности Рэм1.
Часть
этой мощности (
)
превращается в тепло, т.е. в потери в
обмотке ротора. Но для вращения ротора
против поля требуется еще и механическая
энергия, источником которой является
электромагнитная мощность прямой
последовательности Рэм1.
Часть
этой мощности (![]() )
также превращается в тепло. Эта часть
равна
)
также превращается в тепло. Эта часть
равна
![]() .
.
Механическая мощность, развиваемая несимметричным двухфазным микродвигателем равна:
![]()
Механические
потери ![]() –
потери на трение и вентиляцию, определяют
по эмпирическим формулам [4], суть которых
заключается в том, что эти потери
пропорциональны квадрату скорости
вращения
–
потери на трение и вентиляцию, определяют
по эмпирическим формулам [4], суть которых
заключается в том, что эти потери
пропорциональны квадрату скорости
вращения ![]() .
.
Полезная мощность на валу микродвигателя
![]() (4.15)
(4.15)
Потребляемая электрическая мощность
![]() .
(4.16)
.
(4.16)
КПД микродвигателя
![]() .
(4.17)
.
(4.17)
Коэффициенты мощности
![]() ;
;
![]() (4.18)
(4.18)
Ни в энергетической диаграмме, ни в расчетах не упоминались добавочные потери.
Согласно
ГОСТ 183–74 они составляют
![]() от потребляемой мощности, что практически
выходит за пределы точности расчетов
микромашин.
от потребляемой мощности, что практически
выходит за пределы точности расчетов
микромашин.