

8. Синхронные реактивные микродвигатели
Синхронными
реактивными микродвигателями (СРМД)
называются двигатели, вращающий момент
в которых создается только НС статора
за счет разной магнитной проводимости
по продольной и поперечной осям машины.
Различие проводимостей по осям
![]() и
и
![]() осуществляется либо конструкцией ротора
благодаря выступам и впадинам (рис.
3.6,а), либо выполнением его из разных
материалов, например из алюминия 1 и
стали 2 (рис. 3.6,б).
осуществляется либо конструкцией ротора
благодаря выступам и впадинам (рис.
3.6,а), либо выполнением его из разных
материалов, например из алюминия 1 и
стали 2 (рис. 3.6,б).
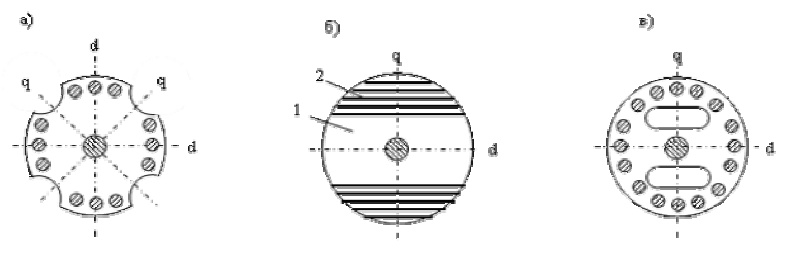
Рис. 3.6. Роторы синхронных реактивных микродвигателей
Принцип
действия СРМД в синхронном
режиме
рассмотрим на следующей модели (рис.
3.7). Представим вращающееся магнитное
поле статора П–образным постоянным
магнитом, внутри которого находится
невозбужденный явнополюсный ротор. При
совпадении оси постоянных магнитов с
продольной осью ротора силовые линии
поля проходят через зазор радиально,
т.е. не деформируясь (рис. 3.7,а). В этом
случае
![]() ,
,![]() .
.
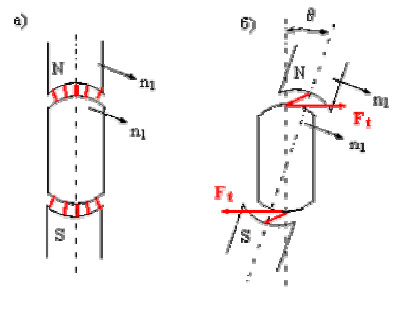
Рис. 3.7. К вопросу о принципе действия СРМД
Если
вращающийся ротор чуть притормозить,
между осями образуется угол q,
линии поля, проходя через зазор,
деформируются (их можно уподобить
резиновым жгутам), возникают силы
магнитного натяжения, тангенциальные
составляющие которых развивают реактивный
момент и увлекают ротор за полем статора
(рис.3.7,б). Формулу реактивного момента
при
![]() получим из (3.2), положив в ней
получим из (3.2), положив в ней
![]() .
.
![]() (3.3)
(3.3)
Исходя
из принципа действия и формулы (3.3) можно
предположить, что чем больше разница
между ![]() и
и
![]() ,
тем лучше свойства машины. Однако это
не так. Дело в том, что с увеличением
разности
,
тем лучше свойства машины. Однако это
не так. Дело в том, что с увеличением
разности ![]() и
и
![]() увеличивается
средний воздушный зазор, что приводит
к увеличению намагничивающего тока,
тока статора, падения напряжения в
обмотке статора
увеличивается
средний воздушный зазор, что приводит
к увеличению намагничивающего тока,
тока статора, падения напряжения в
обмотке статора
![]() и, как следствие, к уменьшению магнитного
потока в асинхронном режиме. При этом
уменьшается пусковой (при
и, как следствие, к уменьшению магнитного
потока в асинхронном режиме. При этом
уменьшается пусковой (при
![]() )
и подсинхронный (при s
@ 0)
моменты.
)
и подсинхронный (при s
@ 0)
моменты.
Исследования
показали, что для ротора рис. 3.6,а
оптимальными размерами будут: отношение
полюсной дуги к полюсному делению 0,5 ¸
0,6;
![]() 10,
12. И даже такие двигатели имеют невысокие
энергетические показатели:
10,
12. И даже такие двигатели имеют невысокие
энергетические показатели:
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
В
последнее время большое признание
получили двигатели с ротором типа рис.
3.6,в, которые имеют значительную разность
![]() и
и
![]() при относительно небольшом среднем
воздушном зазоре. Благодаря такой
конструкции, характеристики СРМД
улучшаются в среднем на 30¸ 40 % по сравнению
с ротором явнополюсной конструкции
(рис. 3.6,а).
при относительно небольшом среднем
воздушном зазоре. Благодаря такой
конструкции, характеристики СРМД
улучшаются в среднем на 30¸ 40 % по сравнению
с ротором явнополюсной конструкции
(рис. 3.6,а).
В целом СРМД развивают полезную мощность в 2¸ 3 раза меньшую, чем асинхронные двигатели таких же габаритов. Во многом это объясняется тем, что в создании момента участвует только одна половина машины (статор), а не две (статор и ротор), как во всех других двигателях.
Векторную
диаграмму синхронного реактивного
микродвигателя можно построить, используя
уравнение напряжения синхронного
явнополюсного двигателя, приняв
![]() (рис. 3.8).
(рис. 3.8).
![]()
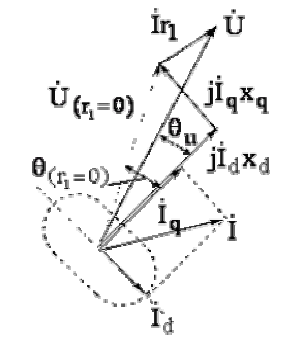
Рис.3.8. Векторная диаграмма синхронного реактивного микродвигателя
На
рис. 3.8 пунктиром показан вектор напряжения
при
![]() .Видно,
что с учетом
.Видно,
что с учетом![]() угол
угол![]() уменьшается. Это дает основания
утверждать, что активное сопротивление
статора смещает угловую характеристику
в сторону меньших углов. Кроме того,
из–за потерь в обмотке статора уменьшается
полезный момент, что смещает эту
характеристику еще и вниз (рис. 3.9).
уменьшается. Это дает основания
утверждать, что активное сопротивление
статора смещает угловую характеристику
в сторону меньших углов. Кроме того,
из–за потерь в обмотке статора уменьшается
полезный момент, что смещает эту
характеристику еще и вниз (рис. 3.9).
В порядке иллюстрации можно привести формулу электромагнитного момента реактивного двигателя с учетом активного сопротивления статора [1]

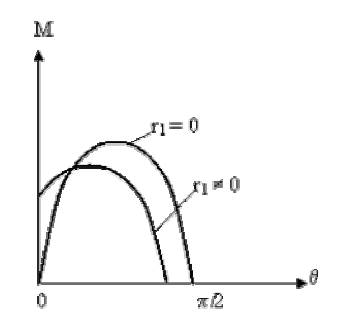
Рис.3.9. Угловые характеристики синхронного реактивного микродвигателя
В
результате смещения угловой характеристики
влево максимальный момент реактивного
двигателя наступает при углах порядка
![]() .
.
Особенности пусковой характеристики СРМД. В двигателях с ротором рис. 3.6,а пусковая обмотка несимметричная либо по причине отсутствия стержней в междуполюсном пространстве, либо по причине разных индуктивных сопротивлений стержней, лежащих в полюсных наконечниках и вне их.
В этом случае поле, созданное короткозамкнутой обмоткой ротора, становится эллиптическим, т.е. состоящим из прямо и обратновращающихся составляющих.
Прямое
поле ротора вращается относительно
статора с синхронной частотой
![]() и, взаимодействуя с его полем, создает
обычный асинхронный момент
и, взаимодействуя с его полем, создает
обычный асинхронный момент![]() .
Обратное поле ротора вращается
относительно статора с частотой
.
Обратное поле ротора вращается
относительно статора с частотой![]() , поэтому его действие зависит от
скольжения
, поэтому его действие зависит от
скольжения![]() .
.
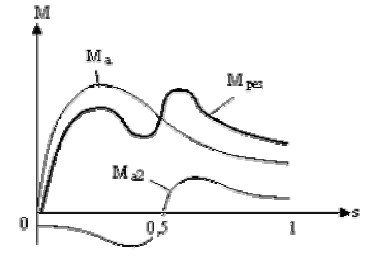
Рис. 3.10. Пусковая характеристика СРМД с несимметричной пусковой обмоткой
Пока
скольжение изменяется от 1 до 0,5 это поле
помогает разгонять ротор. Когда же
скольжение станет меньше 0,5, это поле
будет создавать тормозной момент
![]() ,
препятствующий разгону двигателя. В
результате в пусковой характеристике
появится провал, могущий привести к
застреванию двигателя на скорости,
примерно равной половине синхронной
(рис. 3.10).
,
препятствующий разгону двигателя. В
результате в пусковой характеристике
появится провал, могущий привести к
застреванию двигателя на скорости,
примерно равной половине синхронной
(рис. 3.10).
Вход в синхронизм. Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший подсинхронной скорости, должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому входной момент в сильной степени зависит от момента инерции ротора и момента нагрузки. Рассмотрим процесс входа в синхронизм на примере двигателя с постоянными магнитами [2].
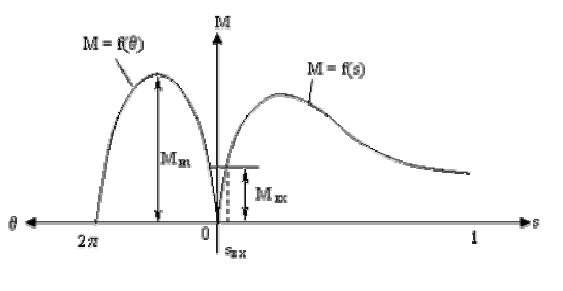
Двигатель войдет в синхронизм, если работа, совершаемая синхронным моментом, будет больше или равна сумме прироста кинетической энергии ротора и работы преодоления сопротивления нагрузки:
![]() .
(3.4)
.
(3.4)
Зависимость
синхронного момента от угла
![]() с учетом
с учетом
![]() носит сложный характер (3.2').
носит сложный характер (3.2').
Примем ее синусоидальной:
![]() .
.
Тогда
![]()
Изменение кинетической энергии ротора
![]()
где
![]() – момент инерции ротора;
– момент инерции ротора; ![]() –
скольжение, при котором двигатель входит
в синхронизм.
–
скольжение, при котором двигатель входит
в синхронизм.
Если
принять пусковую характеристику
двигателя на участке
![]() – линейной, работу по преодолению
сопротивления нагрузки найдем по формуле
– линейной, работу по преодолению
сопротивления нагрузки найдем по формуле
![]() ,
(3.5)
,
(3.5)
где
![]() – продолжительность входа в синхронизм.
Ее найдем из закона сохранения момента
количества движения.
– продолжительность входа в синхронизм.
Ее найдем из закона сохранения момента
количества движения.
![]() .
.
Приняв
![]() ,
получим
,
получим
![]() .
.
Подставляя это значение в формулу (3.5), находим
 .
.
Неравенство (3.4) принимает вид
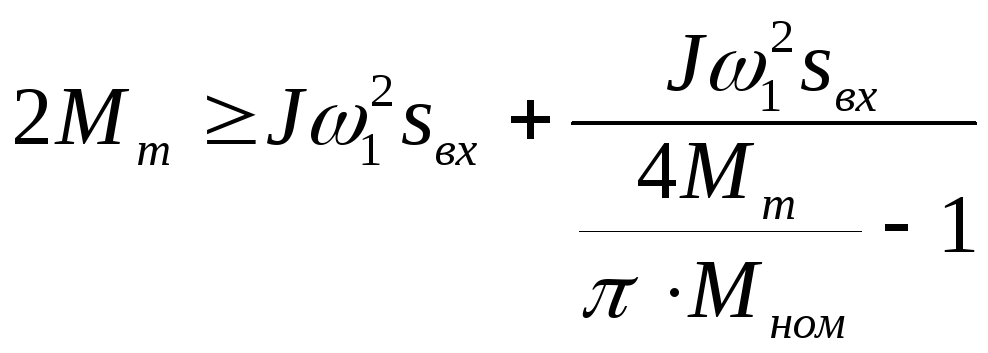 .
.
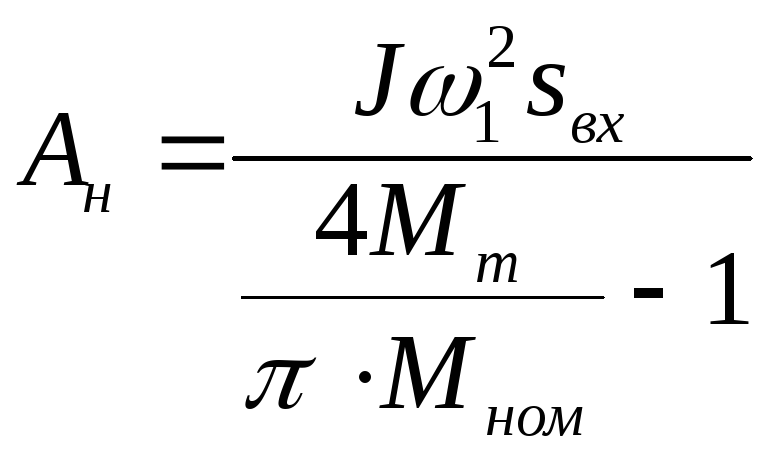
Отсюда
 .
(3.6)
.
(3.6)
Соотношение
(3.6) определяет при заданных ![]() и
и ![]() скольжение
асинхронного режима, при котором возможен
вход двигателя в синхронизм.
скольжение
асинхронного режима, при котором возможен
вход двигателя в синхронизм.