

19. Динамические свойства асинхронных исполнительных двигателей
Одним из главных требований, предъявляемых к исполнительным двигателям, является требование высокого быстродействия, под которым понимают способность двигателя достигать заданной частоты вращения за максимально короткое время.
Быстродействие определяется скоростью протекания электромагнитных и электромеханических переходных процессов, возникающих в двигателе при подаче сигнала управления.
Как
известно, скорость затухания переходных
процессов зависит от постоянных времени
– электромагнитной и электромеханической.
Благодаря большому активному сопротивлению
ротора, электромагнитная постоянная
времени
![]() становится на порядок меньше
электромеханической. Поэтому
электромагнитными переходными процессами
здесь можно пренебречь и считать, что
быстродействие исполнительного двигателя
определяется только электромеханической
постоянной времени. Последнюю найдем
из уравнения движения при пуске двигателя
вхолостую
становится на порядок меньше
электромеханической. Поэтому
электромагнитными переходными процессами
здесь можно пренебречь и считать, что
быстродействие исполнительного двигателя
определяется только электромеханической
постоянной времени. Последнюю найдем
из уравнения движения при пуске двигателя
вхолостую![]() .
Здесь
.
Здесь![]() – момент инерции вращающихся частей.
– момент инерции вращающихся частей.
Механические
характеристики идеального асинхронного
исполнительного двигателя линейные,
что позволяет описать их одной формулой
![]() ,
где
,
где![]() и
и
![]() – угловая скорость холостого хода и
пусковой момент. Подставив эту формулу
в уравнение движения и решив его
относительно
– угловая скорость холостого хода и
пусковой момент. Подставив эту формулу
в уравнение движения и решив его
относительно
![]() ,
получим
,
получим
![]()
где
![]() –
электромеханическая постоянная, времени
–
электромеханическая постоянная, времени
![]() (1.11)
(1.11)
На
рис. 1.13 показана кривая разгона двигателя,
из которой видно, что угловая скорость
вращения асимптотически приближается
к установившемуся значению
![]() .
При
.
При![]() угловая скорость вращения
угловая скорость вращения![]() .
Следовательно, постоянную
.
Следовательно, постоянную![]() можно
рассматривать как время разгона двигателя
до скорости, соответствующей
можно
рассматривать как время разгона двигателя
до скорости, соответствующей ![]() .
.
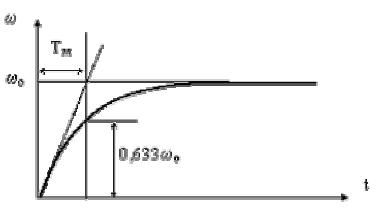
Рис. 1.13. Кривая разгона двигателя при пуске в холостую
При
амплитудном управлении механические
характеристики непараллельные, т.е.
пусковой момент пропорционален
коэффициенту сигнала ![]() ,
где
,
где ![]() – пусковой момент при круговом поле, а
угловая скорость идеального холостого
хода – не пропорциональна
– пусковой момент при круговом поле, а
угловая скорость идеального холостого
хода – не пропорциональна ![]() .
Ее
значение найдем из (1.6), положив
.
Ее
значение найдем из (1.6), положив
![]()
![]() .
.
Подставим
эти значения
![]() и
и
![]() в
(1.11), получим
в
(1.11), получим
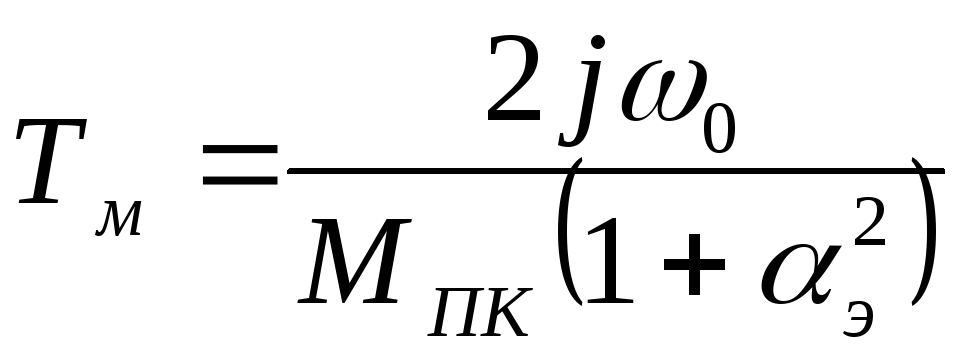 .
.
![]()
Из этой формулы видно, что с уменьшением коэффициента сигнала, электромеханическая постоянная времени растет, а это значит – быстродействие исполнительного двигателя ухудшается. Сказанное относится и к конденсаторному управлению, чьи характеристики похожи на характеристики при амплитудном управлении.
При
фазовом
управлении
механические характеристики параллельные,
т.е. пусковой момент и угловая скорость
холостого хода изменяются пропорционально
коэффициенту сигнала (![]() ,
,
![]() ).
В этом случае электромеханическая
постоянная времени будет
).
В этом случае электромеханическая
постоянная времени будет
![]() ,
,
т.е. при фазовом управлении постоянная времени и быстродействие не зависят от коэффициента сигнала.
Так как механические характеристики реальных двигателей проходят выше идеальных, постоянные времени реальных двигателей всегда получаются немного меньше идеальных. Однако сказанное выше относительно влияния коэффициента сигнала на быстродействие остается справедливым и здесь.
В
выражения постоянных времени входит
значение угловой скорости вращения
![]() ,
,
следовательно,
на величину ![]() влияет
частота сети и число пар полюсов машины.
По этой причине двигатели, рассчитанные
на повышенную частоту, имеют большую
постоянную времени и худшее быстродействие,
чем двигатели, спроектированные на
частоту 50 Гц (см. табл.1).
влияет
частота сети и число пар полюсов машины.
По этой причине двигатели, рассчитанные
на повышенную частоту, имеют большую
постоянную времени и худшее быстродействие,
чем двигатели, спроектированные на
частоту 50 Гц (см. табл.1).
Таблица1. Электромеханические постоянные времени асинхронных исполнительных двигателей
|
Тип двигателя |
| |
|
50 Гц |
400 Гц | |
|
АИД с полым немагнитным ротором |
0,005¸ 0,05
|
0,015¸ 0,10
|
|
АИД с полым ферромагнитным ротором |
0,200¸ 1,00
|
0,300¸ 3,00
|
|
АИД с ротором «беличья клетка» |
0,020¸ 0,10
|
0,050¸ 0,15
|