

26.1. Некоторые особенности конструкции сельсинов
Все
сельсины (индикаторные и трансформаторные)
выпускаются только двухполюсными.
Почему? Ответ на вопрос смотрите на рис.
5.13, где показано два положения обмоток
синхронизации четырехполюсного сельсина:
одно сплошными линиями, другое, повернутое
на
![]() ,
– пунктирными линиями. Легко убедиться,
что магнитные условия в этих положения
совершенно одинаковые, а это значит,
что в индикаторном режиме сельсин будет
иметьдва
устойчивых
положения в пределах одного оборота.
Ясно, что это недопустимо. Сельсин должен
иметь только одно устойчивое положение
в пределах одного оборота, что возможно
только в двухполюсном исполнении.
,
– пунктирными линиями. Легко убедиться,
что магнитные условия в этих положения
совершенно одинаковые, а это значит,
что в индикаторном режиме сельсин будет
иметьдва
устойчивых
положения в пределах одного оборота.
Ясно, что это недопустимо. Сельсин должен
иметь только одно устойчивое положение
в пределах одного оборота, что возможно
только в двухполюсном исполнении.
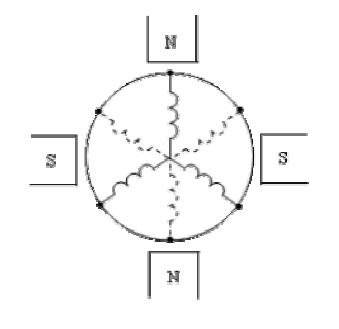
Рис. 5.13. К вопросу о числе полюсов сельсинов
Большинство сельсинов выпускается с тремя обмотками синхронизации. Почему? На рис. 5.14 показана индикаторная схема с сельсинами, имеющими по одной обмотке синхронизации (такие сельсины называются одноосными). Очевидно, что при повороте датчика на угол aд приемник повернется на такой же угол, но может как согласно с датчиком, так и противоположно ему, ибо магнитные условия при +aп и –aп совершенно одинаковые. Поэтому одноосные сельсины могут применяться только в установках, в которых направление поворота приемной оси заранее однозначно определено.
26.2. Дифференциальный сельсин
Дифференциальные сельсины (ДС) применяются в тех случаях, когда приемная ось должна поворачиваться на угол, равный сумме или разности углов поворота двух задающих осей. На рис.5.15 представлена схема индикаторной связи с использованием в качестве приемника дифференциального сельсин.
Конструктивно дифференциальный сельсин не отличается от асинхронного двигателя с фазным ротором.
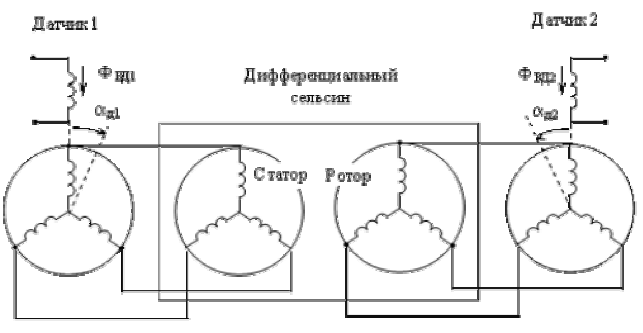
Рис. 5.15. Система синхронной связи с дифференциальным сельсином
Магнитные потоки возбуждения первого и второго датчиков Фв1, Фв2 индуцируют в обмотках синхронизации ЭДС, под действием которых протекают токи и возникают магнитные потоки статора и ротора дифференциального сельсина Фс, Фр. В согласованном положении (aд1=0, aд2=0) эти потоки совпадают и момент ДС равен нулю (рис. 5.16, а).
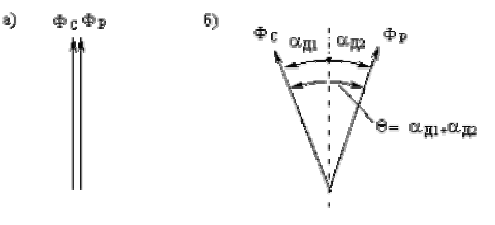
Рис. 5.16. К вопросу о работе дифференциального сельсина
При повороте датчиков на углы aд1 и aд2 на такие же углы, но в обратном направлении (см. § 5.6) повернутся магнитные потоки статора и ротора ДС. Между ними образуется угол q в данном случае равный сумме углов aд1 и aд2 (рис.5.16 б). Стремление потоков Фс, Фр снова придти в согласованное положение приводит к образованию вращающего момента ДС, под действием которого его ротор поворачивается на угол q. Направление поворота ротора ДС всегда совпадает с направлением поворота вектора Фр к вектору Фс. Если датчики повернуть на углы aд1 и aд2 в одном направлении, ротор ДС повернется на угол q, равный их разности.
26.3. Магнитоэлектрические сельсины(магнесины)
Магнесины – миниатюрные бесконтактные сельсины применяются в системах индикаторной связи при коротких расстояниях между датчиком и приемником в условиях невысоких требований к точности передачи угла.
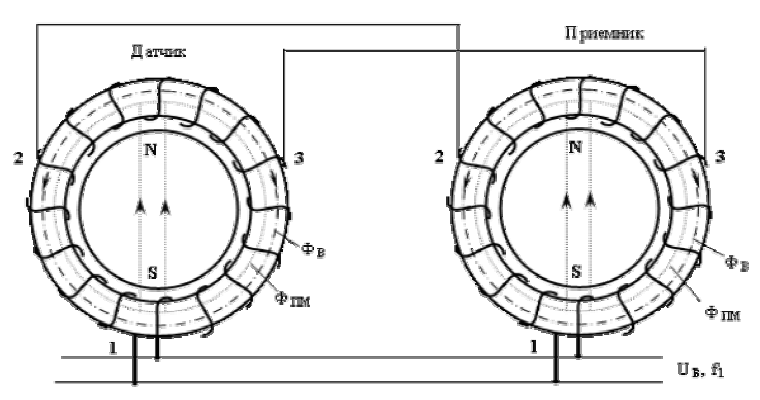
Рис. 5.17. Схема синхронной связи на магнесинах
Статор
магнесина выполнен из листового пермалоя
в виде тороида, на котором намотана
кольцевая обмотка возбуждения (рис.5.17).
Через
![]() на обмотке сделаны два отвода. Ротор –
постоянный магнит цилиндрической формы.
на обмотке сделаны два отвода. Ротор –
постоянный магнит цилиндрической формы.
При питании обмотки возбуждения переменным током возникает магнитный поток ФВ, который замыкается по тороиду и пульсирует с частотой сети возбуждения f1 (рис.5.18). В те моменты времени, когда поток максимальный, пермалоевый сердечник сильно насыщается и его проводимость l становится минимальной. В те же моменты времени, когда поток ФВ минимальный или равен нулю, проводимость пермалоя становится максимальной. Таким образом, за один период изменения потока ФВ проводимость пермалоя l дважды изменяется по величине, т.е. она пульсирует с двойной частотой f=2f1.
В такт с проводимость сердечника изменяется поток постоянного магнита ФПМ, также замыкающийся по тороиду. Этот поток индуцирует в обмотке магнесина ЭДС двойной частоты. Если датчик и приемник находятся в согласованном положении, ЭДС двойной частоты в точках 1,2,3 датчика и соответственно 1,2,3 приемника равны и взаимно уравновешивают друг друга.
При повороте датчика на какой–то угол равенство ЭДС нарушается, по обмоткам протекают токи двойной частоты, которые, взаимодействуя с потоком постоянного магнита, развивают вращающий момент и поворачивают приемник на заданный угол. Следует заметить, что ЭДС основной частоты в точках 1,2,3 не зависит от положения ротора.
Обычно погрешность магнесинов составляет 1 ÷ 2,50.
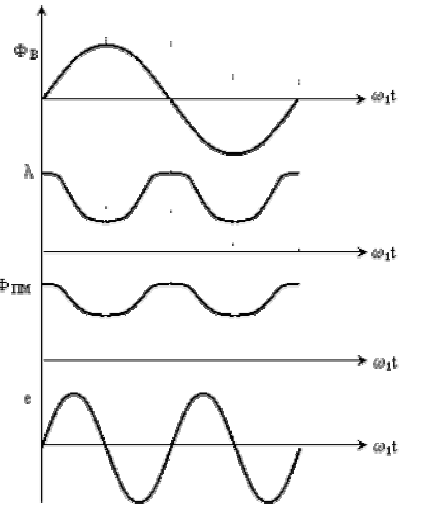
Рис. 5.18. К вопросу о работе синхронной связи на магнесинах