

27.3. Многополюсные поворотные трансформаторы
До сих пор мы рассматривали ПТ, не говоря об их полюсности, имея в виду двухполюсное исполнение. Такие трансформаторы обеспечивают высокую точность работы. Однако в прецизионных системах управления этой точности бывает недостаточно главным образом из–за погрешностей, вызванных асимметрией магнитной цепи и эксцентриситетом между статором и ротором. Многополюсные ПТ малочувствительны к этим погрешностям, поэтому точность их работы заметно выше.
Многополюсные трансформаторы выполняются плоскими, т.е. имеющими малую длину и большой диаметр, что позволяет увеличить число пар полюсов. Обычно такие трансформаторы встраиваются непосредственно в прибор, поэтому они не имеют подшипниковых щитов, а роторы размещают на вращающихся частях приборов. Существует большое число различных модификаций ПТ многополюсного исполнении, среди которых особое место занимают индуктосины и редуктосины.
Редуктосин состоит из статора и ротора, которые имеют большое число открытых пазов (рис 6.10). Их соотношение может быть различным: Zс/Zр=4/3; 4/5; 4/7; 8/7 и т.д. В пазах статора укладывается три обмотки: первичная – обмотка возбуждения (В) и две вторичных – синусная (С) и косинусная (К). Первичная обмотка укладывается в каждом пазу, вторичные обмотки – через паз. Ротор – без обмотки.
Катушки выходных обмоток включаются по дифференциальной схеме, т.е. встречно катушкам возбуждения. При вращении ротора происходит изменение
взаимоиндуктивности между статором и ротором, в результате во вторичных обмотках индуцируются две ЭДС, сдвинутые на 90 эл. градусов: Es=Emsin(Zpa) и Ec=Emcos(Zpa).
Часто редуктосины используются для измерения линейных перемещений. В этом случае они выполняются в развернутом виде, как линейные машины. Такие редуктосины применяются в металлорежущих станках с поступательным движением рабочих органов.
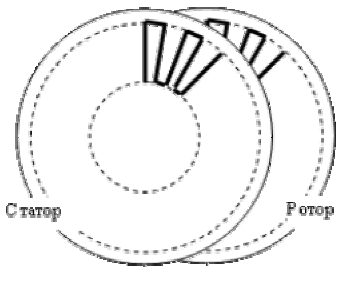
Рис. 6.11. Индуктосин
Индуктосин представляет собой машину, состоящую из двух изоляционных дисков, на смежных поверхностях которых нанесены печатные обмотки (рис.6.11). Последние представляют токоведущие пластины, соединенные поочередно то у центра, то у периферии. Разумеется, число таких пластин должно быть четным.
Диски расположены соосно параллельно и могут поворачиваться друг относительно друга. Магнитопровода индуктосин не имеет. Зазор между дисками весьма мал – 0,1 мм. Синусоидальную зависимость взаимной индуктивности между статором и ротором достигают путем выбора определенного соотношения ширины проводника к полюсному делению, скоса проводников, сокращения шага обмотки. Частота напряжения питания индуктосина 10÷100 кГц. Однако, не смотря на небольшой зазор, коэффициент передачи напряжения составляет всего 0,005÷0,01. Тем не менее, при питании обмотки статора переменным током в роторе индуцируется ЭДС, величина которой является функцией угла поворота ротора. Погрешность синхронно–следящей системы с индуктосином очень маленькая – несколько угловых секунд.
27.4. Синусные обмотки
Синусными называются однослойные концентрические обмотки, число проводников которых распределяется по пазам по определенному закону. В результате кривая намагничивающей силы получается весьма близкой к синусоиде.
Используется различное распределение проводников по пазам: треугольное, трапецеидальное. Однако наилучший результат дает синусоидальный закон: ni = wmaxsin(2i–1)p/z, где ni– число витков в i–ом пазу; i–номер паза, считая от оси обмотки; wmax– максимальное число витков фазы. Найдем значение wmax на примере обмотки ротора ПТ (рис.6.12).
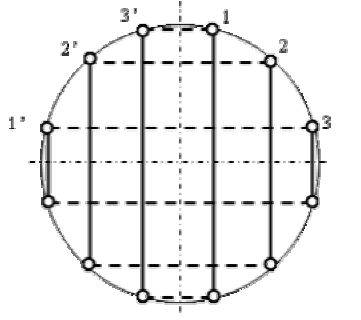
Рис. 6.12
На рис. 6.13 построена кривая распределения НС этой обмотки. Обратите внимание на высоты прямоугольников, составляющих ступенчатую трапецию НС. Они разные, поскольку разные числа витков катушек обмотки. Разложив кривую НС в ряд Фурье, получим амплитуду первой гармоники
![]() ,
,
Взяв по справочнику значения сумм,
![]() .
.
Сравнивая это выражение с общеизвестным выражением НС распределенной однофазной обмотки, получим wmax=4wэф/z. Здесь wэф– эффективное число витков фазы.
Рис. 6.13
Гармонический анализ кривых НС синусных обмоток показывает, что они содержат гармоники весьма высоких порядков n=zn±1 (n=1, 2,...). Так, например, для поворотного трансформатора с числом пазов на статоре 20 и на роторе 12 порядки гармоник будут:
zc=20; nc=19, 21, 39, 41, 59, 61, 79, 81,...
zp=12; np=11, 13, 23, 25, 35, 37, 47, 49, 59, 61,...
Видно, что электромагнитная связь между обмотками статора и ротора начинается с 59–й и 61–й гармоник, являющихся общими для них. Учитывая столь высокие порядки, а также значительное ослабление гармоник за счет скоса пазов, можно быть уверенным в высоком качестве кривых НС поворотных трансформаторов с синусными обмотками.