

2.3. Метод симметричных составляющих применительно к несимметричным двухфазным микромашинам
Для исследования несимметричных двухфазных микромашин могут использоваться различные методы.
Метод двух реакций. Суть метода заключается в том, что намагничивающие силы, поля и потокосцепления обмоток статора и ротора раскладываются по двум взаимно перпендикулярным осям. Метод особенно эффективен при анализе явнополюсных синхронных микромашин с неравномерным воздушным зазором.
Метод вращающихся полей. Он основан на представлении любой m – фазной машины суммой m однофазных машин, в каждой из которых имеются прямо и обратно вращающиеся поля.
Метод симметричных составляющих. По существу сводится к тому, что двухфазная несимметричная система токов или НС раскладывается на две симметричные системы: прямую и обратную, каждая из которых создает свое круговое магнитное поле, вращающееся в прямом или обратном направлении. Метод получил наибольшее признание в трудах Ю. С. Чечета и его учеников Ф. М. Юферова, Е. М. Лопухиной и др.
Подавляющее
большинство современных микромашин
переменного тока имеют на статоре две
обмотки, сдвинутые в пространстве на
90 эл. градусов, что продиктовано
стремлением получить максимальное
круговое поле при минимальных токах в
обмотках. Вместе с тем, редко удается
сдвинуть токи в обмотках на угол, равный
![]() во времени. Поэтому на практике чаще
приходится иметь дело с несимметричными
временными системами токов, намагничивающих
сил, магнитных потоков и т.д.
во времени. Поэтому на практике чаще
приходится иметь дело с несимметричными
временными системами токов, намагничивающих
сил, магнитных потоков и т.д.
Согласно
методу симметричных составляющих любую
систему двух векторов
![]() и
и![]() разных
по величине, сдвинутых во времени на
произвольный угол, можно разложить на
две симметричные составляющие системы
равных по величине векторов и сдвинутых
во времени на
разных
по величине, сдвинутых во времени на
произвольный угол, можно разложить на
две симметричные составляющие системы
равных по величине векторов и сдвинутых
во времени на![]() .
.
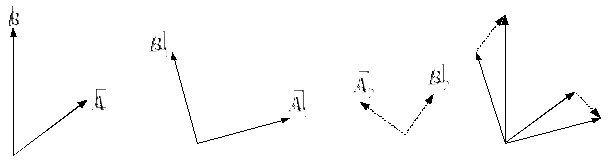
а б в г
Рис. 2.3. Несимметричная система векторов (а) и ее симметричные составляющие (б, в, г).
Одна из симметричных систем имеет порядок чередования векторов, совпадающий с исходной, и называется прямой последовательностью, другая имеет обратный порядок чередования векторов и называется обратной последовательностью (рис. 2.3).
Выразим
заданные векторы
![]() и
и
![]() через
симметричные составляющие
через
симметричные составляющие
![]() ;
;
![]() (2.5)
(2.5)
Как видно из рис. 1.4, симметричные составляющие связаны между собой соотношением:
![]() ,
,
![]() (2.6)
(2.6)
Подставляя (2.6) в (2.5) и решая уравнения с двумя неизвестными, получим выражения симметричных составляющих через векторы исходной системы [1]:
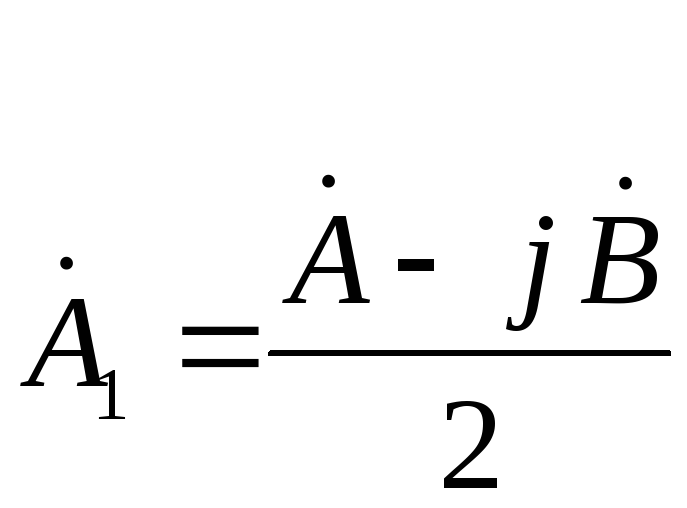 ;
;
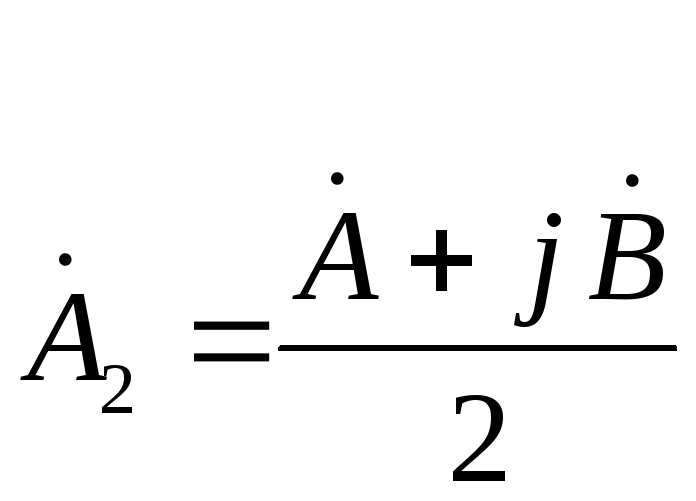 .
(2.7)
.
(2.7)
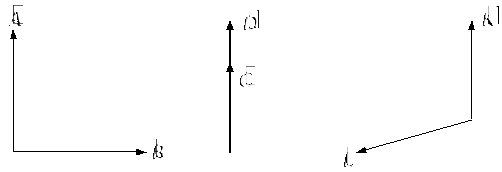
На
рис. 2.4 выполнено графическое разложение
несимметричной системы векторов
![]() и
B
на
симметричные составляющие с использованием
уравнений (2.6) и (2.7).
и
B
на
симметричные составляющие с использованием
уравнений (2.6) и (2.7).
На
практике при анализе двухфазных
микромашин в качестве векторов A
и
B
используют
векторы НС
![]() и
и![]() ,
потоков
,
потоков
![]() и
и
![]() ,
токов
,
токов
![]() и
и
![]() и
т. д.
и
т. д.
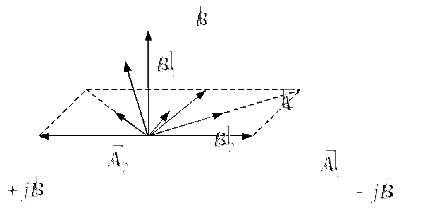
Рис. 2.4. Графическое разложение несимметричной системы векторов на симметричные составляющие
Метод симметричных составляющих пригоден не только для анализа несимметричных двухфазных микромашин, но и как предельный случай несимметрии – однофазных микромашин, полагая, что ток и его симметричные составляющие в одной из обмоток, которой фактически нет, равен нулю.
Задача 2.2. Разложить графически несимметричные системы векторов на симметричные составляющие.
а б в