

19.2. Конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели выпускаются следующих видов: 1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа "беличья клетка".
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности – от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора–сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1–1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина
которых обычно не превосходит 0,15–0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.
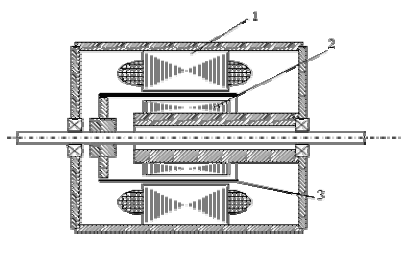
Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1–5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую – на внешнем статоре.
Достоинства двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01–0,1 с. при f = 50 Гц и 0,02–0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05–0,1)rр].
3) Высокая чувствительность – малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Недостатки двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая – для авиационной и космической техники, а третья – для средств вычислительной техники.
Асинхронные
исполнительные двигатели с полым
ферромагнитным ротором.
В отличии от двигателей первого типа
ротор этого двигателя выполняется из
магнитного материала с толщиной стенок
0,3–3 мм, поэтому здесь отсутствует
внутренний статор. Воздушный зазор
небольшой (0,2–0,3 мм). Однако намагничивающий
ток (![]() )
этого двигателя практически мало
отличается от
)
этого двигателя практически мало
отличается от
![]() двигателя
с полым немагнитным ротором, т.к.проводимость
ротора и здесь невысокая вследствие
его малой толщины.
двигателя
с полым немагнитным ротором, т.к.проводимость
ротора и здесь невысокая вследствие
его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные с омеднением ротора с целью увеличения пускового момента, оказались малоэффективными. Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам в работе. В целом эти двигатели значительно уступают двигателям с полым немагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой "сквозной" конструкции.
Первые
отличаются от силовых машин только
повышенным активным сопротивлением
ротора и используются в тех установках,
где требования высокого быстродействия
не играют существенной роли. Вторые
имеют оригинальную конструкцию, суть
которой состоит в том, что диаметр
расточки статора
![]() равен
наружному диаметру подшипника
равен
наружному диаметру подшипника
![]() (рис. 1.18) Такая конструкция позволяет
проводить окончательную обработку
(шлифовку) внутренней поверхности
статора и отверстий под подшипники в
подшипниковых щитах за одну установку
двигателя на станке. Конечно, перед этим
подшипниковые щиты должны быть закреплены
на статоре. Обычно лобовые части покрывают
специальным компаундом для предохранения
их от металлической стружки.
(рис. 1.18) Такая конструкция позволяет
проводить окончательную обработку
(шлифовку) внутренней поверхности
статора и отверстий под подшипники в
подшипниковых щитах за одну установку
двигателя на станке. Конечно, перед этим
подшипниковые щиты должны быть закреплены
на статоре. Обычно лобовые части покрывают
специальным компаундом для предохранения
их от металлической стружки.
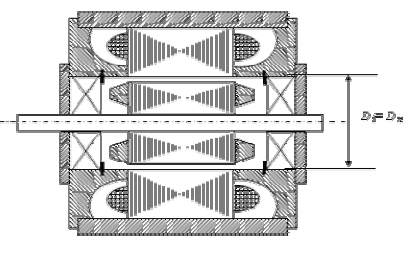
Рис. 1.18. Асинхронный исполнительный двигатель "сквозной" конструкции
"Сквозная"
конструкция позволяет получать воздушные
зазоры в 0,03–0,05 мм, что на уменьшения
момента инерции их выполняют с малым
диаметром и увеличенной длиной ротора.
Обычно
![]() .
.
Малые
воздушные зазоры резко уменьшают
намагничивающий ток, увеличивают КПД,
![]() ,
вращающий момент двигателя. Однако
сравнительно большой момент инерции
(по отношению к двигателям с полым
немагнитным ротором) приводит к увеличению
электромеханической постоянной времени.
,
вращающий момент двигателя. Однако
сравнительно большой момент инерции
(по отношению к двигателям с полым
немагнитным ротором) приводит к увеличению
электромеханической постоянной времени.