

21.1. Динамические характеристики исполнительных двигателей постоянного тока
Механические характеристики исполнительных двигателей постоянного тока линейные, поэтому для них выражение электромеханической постоянной времени будет иметь известный вид (1.11).
При
якорном управлении характеристики
параллельные, т.е. пусковой момент и
угловая скорость холостого хода
изменяются пропорционально коэффициенту
сигнала:
![]() ,
,![]() .
В этом случае постоянная времени, а
следовательно и быстродействие, не
зависят от коэффициента сигнала.
.
В этом случае постоянная времени, а
следовательно и быстродействие, не
зависят от коэффициента сигнала.
При
полюсном управлении пусковой момент
прямо– а угловая частота вращения
холостого хода обратно пропорциональны
коэффициенту сигнала:
![]() ,
,![]() .
Постоянная времени будет
.
Постоянная времени будет![]() .
Видно, что при полюсном управлении
быстродействие в сильной степени зависит
от коэффициента сигнала, ухудшаясь с
его уменьшением.
.
Видно, что при полюсном управлении
быстродействие в сильной степени зависит
от коэффициента сигнала, ухудшаясь с
его уменьшением.
21.2. Конструкции исполнительных двигателей постоянного тока
По конструкции исполнительные двигатели можно разделить на двигатели с ферромагнитным якорем и малоинерционные, не имеющие ферромагнитного сердечника якоря.
Двигатели с ферромагнитным якорем и обмоткой возбуждения отличаются от обычных машин лишь тем, что имеют полностью шихтованную магнитную систему (якорь, полюса, станину), что продиктовано стремлением уменьшить потери в стали и увеличить быстродействие в переходных режимах. Это двигатели серий СЛ, МИ, ПБС и др. Есть двигатели (серии ДП и ДПМ), в которых роль обмотки возбуждения выполняют постоянные магниты. В остальном они ничем не отличаются от названных выше.
Существуют двигатели, например серии МИГ, в которых обмотка якоря располагается не в пазах (их нет), а непосредственно на поверхности якоря, закрепляясь на ней с помощью специального клея и бандажей. "Беспазовое" исполнение обмотки значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает быстродействие. Недостатком гладкого якоря является большой немагнитный промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения.
Малоинерционные двигатели выпускаются двух типов: 1) с дисковым якорем и печатной обмоткой; 2) с полым немагнитным якорем и обычной обмоткой. Один из вариантов двигателя первого типа показан на рис. 2.14. В его состав входят: дисковый якорь 1, выполненный из тонкого изоляционного материала, на обеих сторонах которого фотохимическим методом нанесена обмотка якоря; кольца 2 и 3 из магнитомягкой стали, по которым замыкается магнитный поток, созданный постоянными магнитами 4, и щетки 5, непосредственно касающиеся оголенных проводников якоря. Как видно, здесь отсутствует отдельный коллектор.
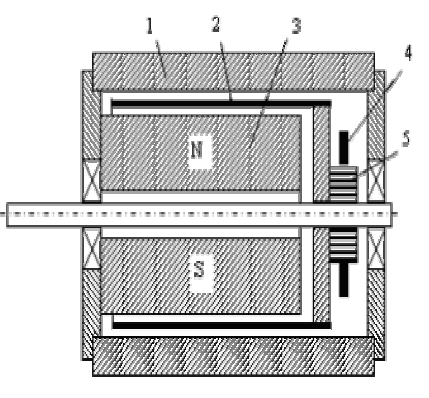
Двигатель второго типа показан на рис. 2.15.
Якорь малоинерционных двигателей примерно в 8 раз легче, а момент инерции в 5¸ 10 раз меньше, чем у обычного двигателя. В результате их постоянные времени в 2¸ 2,5 раза меньше. К тому же они имеют практически безыскровую коммутацию, поскольку их секции обладают меньшей индуктивностью. К недостаткам таких двигателей можно отнести большой воздушный зазор, а, следовательно, большие габариты по сравнению с обычными машинами.
22. Тахогенераторы
22.1. Общие сведения
Тахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал.
Главное требование, предъявляемое к тахогенераторам, заключается в линейности выходной характеристики – пропорциональной зависимости между выходным напряжением U и угловой скоростью вращения n:
![]() ,
(4.1)
,
(4.1)
где:
k,
k’ –
коэффициенты пропорциональности;
![]() – угол поворота.
– угол поворота.
Из уравнения (4.1) видно, что тахогенераторы можно использовать для измерения скорости вращения и для электромеханического дифференцирования, если за входной сигнал принять угол поворота ротора.
По роду тока тахогенераторы можно разделить на ТГ переменного и ТГ постоянного тока.