

25.1. Максимальный синхронизирующий момент
![]() .
.
Если предположить отсутствие насыщения магнитной цепи, то Фвп= kфUв. Поскольку Еm=4,44fWфkоФвп, то Еm = keUв. С учетом этих соотношений можно записать Мm = kUв 2sinj2/Zф.
В свою очередь sinj2 = xф/Zф, где
Тогда окончательное значение максимального синхронизирующего момента будет
 (5.3)
(5.3)
Из формулы (5.3) видно, что максимальный синхронизирующий момент в сильной мере зависит от напряжения возбуждения и от соотношения активного и реактивного сопротивления вторичной цепи. Его наибольшее значение найдем из условия dMm/dxф=0, решив которое получим xф=rф. Таким образом, максимальный синхронизирующий момент будет наибольшим при равенстве активного и реактивного сопротивления вторичной цепи.
25.2. Факторы, влияющие на точность работы сельсинов в индикаторном режиме
В реальных условиях угол поворота сельсина–приемника немного отличается от угла поворота сельсина–датчика, т.е. точность передачи угла не является абсолютной. Различают статическую и динамическую точности. К тому же для датчика и приемника ее определяют по разному.
Статическая точность сельсина–приемника характеризуется погрешность Dq, которая определяется как полу сумма максимального положительного qmax+ и максимального отрицательного qmax– отклонений ротора приемника от соответствующего положения ротора датчика за один оборот в установившемся режиме:
![]() .
.
По величине погрешности Dq индикаторные сельсины–приемники делятся на четыре класса точности: I класс – Dq<030'; II класс – Dq<45'; III класс – Dq<060'; IV класс Dq <90'.
Точность работы сельсинов–приемников в индикаторном режиме определяется рядом факторов, главными из которых являются: 1) удельный синхронизирующий момент – Муд; 2) момент сопротивления на валу – Мсп; 3) добротность – Д; 4) время успокоения – tу.
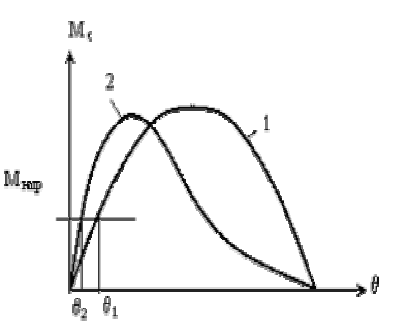
Рис.
Удельный синхронизирующий момент – это момент при угле рассогласования в один градус. Он является важнейшим фактором, определяющим точность работы, ибо именно он, а не максимальный синхронизирующий момент, определяет чувствительность системы передачи угла. Действительно, чем выше Муд, тем выше крутизна начальной части характеристики Mс=f(q), тем меньше ошибка рассогласования, в чем легко убедится, рассматривая рис. 5.10. Поскольку Муд= Mmsin10, все сказанное про Мm справедливо и для Муд, т.е. его зависимость от U2 и соотношения rф и xф.
Большую крутизну начальной части характеристики Mс=f(q) имеют, как правило, явнополюсные сельсины, поэтому для работы в индикаторных схемах целесообразнее применять сельсины указанной конструкции. В этом, в явнополюсности, состоит первое отличие индикаторных сельсинов от трансформаторных.
Часто от одного датчика работает несколько приемников. В этом случае удельный момент каждого сельсина–приемника будет
![]() ,
,
где n – число приемников; Муд.1– удельный момент при работе "один на один".
Момент сопротивления. Поскольку в индикаторных схемах на приемной оси небольшой момент сопротивления, то данный фактор в основном определяется моментом сопротивления в самом сельсине–приемнике. В бесконтактных сельсинах он зависит от качества сборки и изготовления сельсина, от качества и чистоты подшипников. В контактных сельсинах к этим обстоятельствам добавляются чистота и состояние скользящих контактов, давление щеток на кольца и т.п.
Добротность есть интегральный показатель точности работы сельсина–приеника. Она равна Д=Муд/Мсп. Чем выше добротность, тем выше точность работы системы.
Время
успокоения
– время, в течение которого ротор
приемника останавливается после вывода
его из согласованного положения на
![]() .
В современных сельсинах оно составляет
0,5–
1,5 с, что достигается установкой
электрических или механических демпферов.
Наличие таких демпферов
отличает сельсины–приемники от
сельсинов– датчиков.
.
В современных сельсинах оно составляет
0,5–
1,5 с, что достигается установкой
электрических или механических демпферов.
Наличие таких демпферов
отличает сельсины–приемники от
сельсинов– датчиков.
Следует сказать, что на точность работы влияют некоторые факторы технологического и конструкционного характера, такие например, как электрическая и магнитная асимметрия, высшие гармоники магнитного поля, механический небаланс ротора и ряд других. Бороться с ними можно путем тщательного изготовления каждой детали и всего сельсина в целом, выполнением скоса пазов, выбором благоприятного соотношения числа зубцовых делений в пределах полюсной дуги, применением специальных (синусных) обмоток, веерообразной шихтовкой.
Точность
сельсинов–датчиков определяется иначе,
чем сельсинов–приемников. За
ошибку датчика принимают ошибку
асимметрии,
т.е. отклонение фактических положений
ротора, в которых ЭДС равна нулю, от
теоретических, отстоящих друг от друга
на
![]() .
Ее, как и у приемника, определяют полу
суммой положительных и отрицательных
отклонений за один оборот ротора. В
зависимости от погрешности сельсины–датчики
подразделяют на семь классов точности:
отDq<1'
для I класса до Dq<30'
для VII класса точности.
.
Ее, как и у приемника, определяют полу
суммой положительных и отрицательных
отклонений за один оборот ротора. В
зависимости от погрешности сельсины–датчики
подразделяют на семь классов точности:
отDq<1'
для I класса до Dq<30'
для VII класса точности.
Динамическая точность сельсина–приемника является разностью угловых положений датчика и приемника при вращении датчика с постоянной или переменной скоростью. Динамическая точность заметно меньше статической, поскольку кроме трансформаторной ЭДС в обмотках синхронизации наводятся ЭДС вращения, создающие дополнительные токи и моменты, ухудшающие работу индикаторной схемы.