

14.2. Конструкция и принцип действия пьезоэлектрических микродвигателей
В настоящее время известно более 50 различных конструкций ПМД. Рассмотрим некоторые из них.
К неподвижному пьезоэлементу (ПЭ)– статору – прикладывается переменное трехфазное напряжение (рис. 7.1). Под действием электрического поля конец ПЭ последовательно изгибаясь в трех плоскостях, описывает круговую траекторию. Штырь, расположенный на подвижном конце ПЭ, фрикционно взаимодействует с ротором и приводит его во вращение.
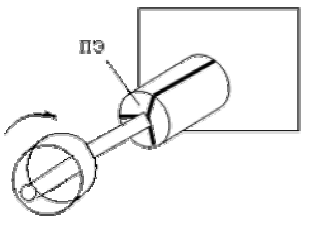
Рис. 7.1.
Большое практическое значение получили шаговые ПМД (рис. 7.2.).
Электромеханический преобразователь, например, в виде камертона 1 передает колебательные движения стержню 2, который перемещает ротор 3 на один зубец. При движении стержня назад собачка 4 фиксирует ротор в заданном положении.
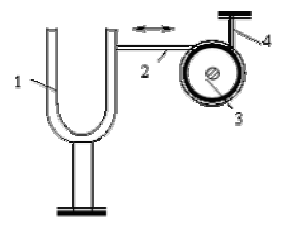
Рис. 7.2.
Мощность описанных выше конструкций не превышает сотые доли ватта, поэтому использование их в качестве силовых приводов весьма проблематично. Наиболее перспективными оказались конструкции, в основе которых лежит принцип весла (рис. 7.3).
Вспомним, как движется лодка. За время, пока весло находится в воде, его движение преобразуется в линейное перемещение лодки. В паузах между гребками лодка движется по инерции.
Основными элементами конструкции рассматриваемого двигателя являются статор и ротор (рис. 7.4). На основании 1 установлен подшипник 2. Ротор 3, выполненный из твердого материала (сталь, чугун, керамика и пр.) представляет собой гладкий цилиндр.
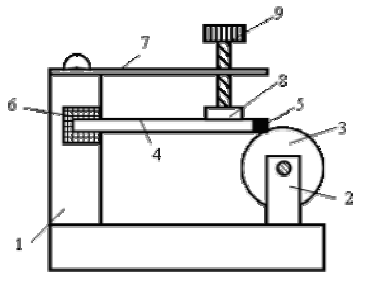
Рис. 7.4.
Неотъемлемой частью ПМД является акустически изолированная от основания и оси ротора электромеханическая колебательная система – осциллятор (вибратор). В простейшем случае он состоит из пьезопластины 4 вместе с износостойкой прокладкой 5.
Второй конец пластины закреплен в основании с помощью эластичной прокладки 6 из фторопласта, резины или другого подобного материала. Осциллятор прижимается к ротору стальной пружиной 7, конец которой через эластичную прокладку 8 давит на вибратор. Для регулирования степени прижатия служит винт 9.
Чтобы объяснить механизм образования вращающего момента, вспомним маятник. Если маятнику сообщить колебания в двух взаимно перпендикулярных плоскостях, то в зависимости от амплитуд, частоты и фаз возмущающих сил его конец будет описывать траекторию от круга до сильно вытянутого эллипса. Так и в нашем случае. Если подвести к пьезопластине переменное напряжение определенной частоты, ее линейный размер будет периодически изменяться: то увеличиваться, то уменьшаться, т.е. пластина будет совершать продольные колебания (рис. 7.5,а).
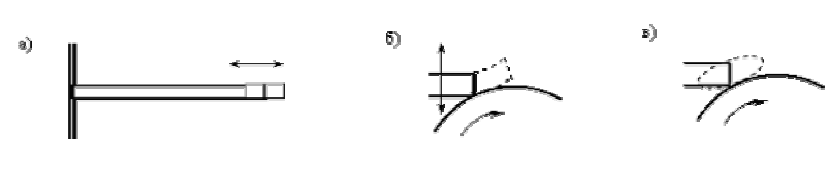
Рис. 7.5
При
увеличении длины пластины ее конец
вместе с ротором переместится и в
поперечном направлении (рис. 7.5,б). Это
эквивалентно действию поперечной
изгибающей силы, которая вызывает
поперечные колебания. Сдвиг фаз продольных
и поперечных колебаний зависит от
размеров пластины, рода материала,
частоты питающего напряжения и в общем
случае может изменяться от
![]() до
до![]() .
При сдвиге фаз, отличном от
.
При сдвиге фаз, отличном от![]() и
и![]() ,
контактная точка движется по эллипсу.
В момент соприкосновения с ротором
пластина передает ему импульс движения
(рис. 7.5,в).
,
контактная точка движется по эллипсу.
В момент соприкосновения с ротором
пластина передает ему импульс движения
(рис. 7.5,в).
Линейная скорость вращения ротора зависит от амплитуды и частоты смещения конца осциллятора. Следовательно, чем больше напряжение питания и длина пьезоэлемента, тем больше должна быть линейная скорость вращения ротора. Однако не следует забывать, что с увеличением длины вибратора, уменьшается частота его колебаний.
Максимальная
амплитуда смещения осциллятора
ограничивается пределом прочности
материала или перегревом пьезоэлемента.
Перегрев материала свыше критической
температуры – температуры Кюри, приводит
к потере пьезоэлектрических свойств.
Для многих материалов температура Кюри
превышает
![]() ,
поэтому максимальная амплитуда смещения
практически ограничивается пределом
прочности материала. С учетом двукратного
запаса по прочности принимают
,
поэтому максимальная амплитуда смещения
практически ограничивается пределом
прочности материала. С учетом двукратного
запаса по прочности принимают![]() .
.
Угловая скорость ротора
![]() ,
,
где
![]() – диаметр ротора.
– диаметр ротора.
Отсюда частота вращения в оборотах в минуту
![]()
Если
диаметр ротора
![]() см,
то
см,
то![]() об/мин.
Таким образом, изменяя только диаметр
ротора, можно в широких пределах изменять
частоту вращения машины.
об/мин.
Таким образом, изменяя только диаметр
ротора, можно в широких пределах изменять
частоту вращения машины.
Уменьшение напряжения питания позволяет снизить частоту вращения до 30 об/мин при сохранении достаточно высокой мощности на единицу массы двигателя. Армируя вибратор высокопрочными сапфировыми пластинами, удается поднять частоту вращения до 10000 об/мин. Это позволяет в широкой области практических задач выполнять привод без использования механических редукторов.