

13. Двигатели с катящимся ротором
Принципиальной особенностью двигателей с катящимся ротором (ДКР), отличающей их от других машин, является эксцентричное расположение ротора в расточке статора. Вращающий момент здесь создается за счет сил одностороннего магнитного притяжения.
Принцип
действия ДКР рассмотрим
с помощью рис. 6.7, на котором изображен
статор с эксцентрично расположенным
ротором. Допустим, что обмотка статора
создает несимметричное магнитное поле,
максимум которого в данный момент
приходится на т.А. Несимметричное поле
создает силу одностороннего магнитного
притяжения, под действием которой ротор
будет соприкасаться со статором в той
же т. А (рис.6.7,а). По мере вращения
магнитного поля сила одностороннего
притяжения перемещается по расточке
статора с синхронной скоростью. В любой
момент времени ее можно разложить на
составляющие
![]() и
и![]() (рис. 6.7,б). Видно, что
(рис. 6.7,б). Видно, что![]() ,
притягивая ротор к статору, заставляет
его катиться по внутреннему диаметру
последнего с синхронной скоростью.
Ротор же медленно поворачивается вокруг
собственного центра, причем в
противоположном направлении. (На рис.
6.7. поле статора повернулось на
,
притягивая ротор к статору, заставляет
его катиться по внутреннему диаметру
последнего с синхронной скоростью.
Ротор же медленно поворачивается вокруг
собственного центра, причем в
противоположном направлении. (На рис.
6.7. поле статора повернулось на![]() против часовой стрелки, а точка
против часовой стрелки, а точка
![]() ,
принадлежащая телу ротора, повернулась
по часовой стрелке на угол
,
принадлежащая телу ротора, повернулась
по часовой стрелке на угол
![]() ,
который заметно меньше
,
который заметно меньше![]() ).
Это вращение и является выходным.
).
Это вращение и является выходным.

Рис. 6.7. К вопросу о принципе действия ДКР
В
конечном итоге при повороте поля статора
на один оборот
![]() ротор повернется на угол, равный разности
длин окружностей статора и ротора,
деленной на радиус ротора
ротор повернется на угол, равный разности
длин окружностей статора и ротора,
деленной на радиус ротора![]() :
:
![]() .
.
Переходя
к частоте вращения и учитывая, что
![]() ,
получим
,
получим
 (6.14)
(6.14)
Так
как в ДКР
![]() ,
то
,
то![]() существенно меньше
существенно меньше![]() ,
т.е. коэффициент редукции здесь весьма
значительный:
,
т.е. коэффициент редукции здесь весьма
значительный:
![]() .
(6.15)
.
(6.15)
В
ДКР различают два момента: электромагнитный
момент
![]() ,
вызывающий вращение центра ротора
вокруг центра статора со скоростью
,
вызывающий вращение центра ротора
вокруг центра статора со скоростью![]()
![]() (6.16)
(6.16)
и
момент
![]() ,
приложенный к ротору и вызывающий
медленное вращение ротора вокруг
собственного центра со скоростью
,
приложенный к ротору и вызывающий
медленное вращение ротора вокруг
собственного центра со скоростью![]() .
.
![]() (6.17)
(6.17)
где
![]() – сила, возникающая в точке касания
ротора о статор, равная по значению
– сила, возникающая в точке касания
ротора о статор, равная по значению
![]() и противоположно ей направленная.
и противоположно ей направленная.
Выражение
![]() зависит от типа двигателя, электромагнитных
нагрузок и способа питания. Для большинства
из них
зависит от типа двигателя, электромагнитных
нагрузок и способа питания. Для большинства
из них
![]() ,
(6.18)
,
(6.18)
где:
![]() –
максимальное значение вращающего
момента, зависящее от значений магнитного
потока статора и эксцентриситета;
–
максимальное значение вращающего
момента, зависящее от значений магнитного
потока статора и эксцентриситета;
![]() – угол между вектором НС статора и
продольной осью ротора, под которой
понимают линию, проходящую через центр
ротора и точку касания ротора и статора.
– угол между вектором НС статора и
продольной осью ротора, под которой
понимают линию, проходящую через центр
ротора и точку касания ротора и статора.
Двигатели
с катящимся ротором могут работать в
синхронном и асинхронном режимах.
Определяется это соотношением силы
трения
![]() в точке касания и составляющей
в точке касания и составляющей![]() .
Если
.
Если![]() ,
проскальзывание невозможно и ДКР
работает в синхронном режиме. В противном
случае ротор вращается с проскальзыванием
и машина переходит в асинхронный режим.
,
проскальзывание невозможно и ДКР
работает в синхронном режиме. В противном
случае ротор вращается с проскальзыванием
и машина переходит в асинхронный режим.
Несимметричное
вращающееся магнитное поле
может быть получено различными способами,
например, наложением униполярного поля,
созданного тороидальной обмоткой
постоянного тока, на двухполюсное
симметричное вращающееся поле обмотки
переменного тока (рис. 6.8, а), или наложением
вращающегося двухполюсного поля на
вращающееся же четырехполюсное поле
(рис. 6.8,б). Этот способ основан на том,
что сила одностороннего магнитного
притяжения пропорциональна квадрату
нормальной составляющей индукции:
![]() .
В ряде современных ДКР несимметричное
поле создают с помощью специальных схем
обмоток и электронных схем питания их.
.
В ряде современных ДКР несимметричное
поле создают с помощью специальных схем
обмоток и электронных схем питания их.
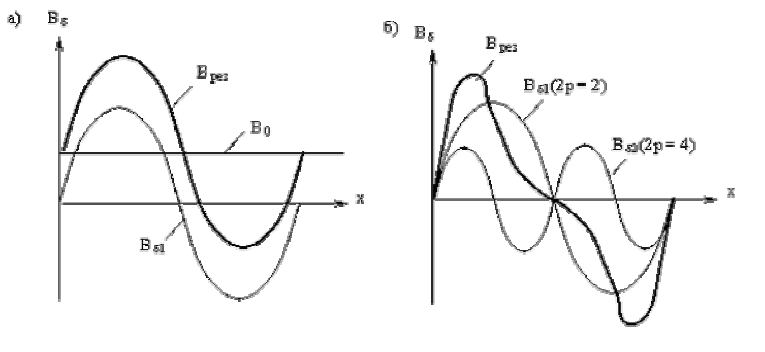
Рис. 6.8. Способы получения несимметричного магнитного поля
В настоящее время существует большое количество исполнений ДКР, весьма разнообразных по роду тока, по характеру изменения скорости, по форме обкатываемых поверхностей, по назначению и т.д.
На рис. 6.9 показана конструктивная схема ДКР с униполярным возбуждением. Тот факт, что в этом двигателе не ротор катится по статору, а катокротора катится по катку статора, не меняет сути дела, а лишь повышает надежность машины, поскольку катки можно сделать из износостойкой стали.
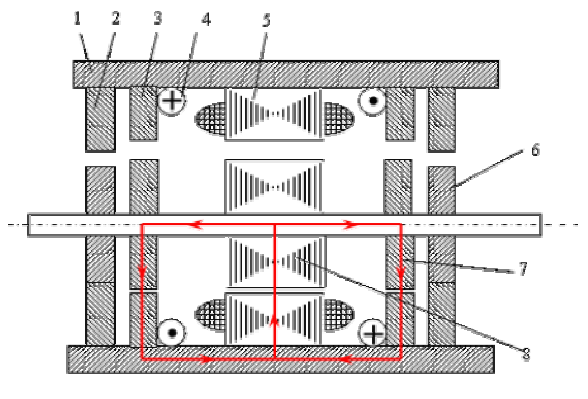
рис. 6.9: 1 – корпус; 2 – стальной каток статора; 3 – ферромагнитное кольцо; 4 – тороидальная катушка, питаемая постоянным током и создающая униполярное магнитное поле; 5 – статор с обмоткой, создающей вращающееся магнитное поле; 6 – стальной каток ротора; 7 – магнитопровод, необходимый для замыкания униполярного потока; 8 – сердечник ротора без обмотки.
Достоинства двигателей с катящимся ротором
1) возможность получения очень малых скоростей (коэффициент редукции достигает 1500);
2) хорошее быстродействие (время разгона не превышает 0,01 с);
3) большие пусковые моменты;
4)
небольшая кратность пускового тока
![]() ;
;
5) отсутствие подшипников, что обеспечивает работу машины практически без смазки.
Недостатки двигателей с катящимся ротором
1) сложность конструкции звена, обеспечивающего передачу несоосного вращения на вал машины. Требуются механизмы типа кардана, альстома, сешерона;
2) вибрации и шум, обусловленные действием центробежных и аксиальных сил, вызванных
несоосным вращением больших масс;
3) неизбежный технологический разброс размеров обкатываемых поверхностей, а следовательно, и разброс выходных скоростей вращения ДКР;
4) сравнительно небольшой срок службы вследствие износа поверхностей катков.