

19.1. Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Технологический самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из–за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна веерообразная шихтовка пакетов – смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
Параметрический самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С
целью устранения параметрического
самохода асинхронные исполнительные
двигатели изготавливаются с роторами,
имеющими большое активное сопротивление.
В результате момент однофазной машины
становится не движущим (+) а тормозящим
(–), в чем легко убедиться, рассматривая
характеристики двух однофазных двигателей
с различными критическими скольжениями:
![]() и
и![]() (рис. 1.14,а и б).
(рис. 1.14,а и б).
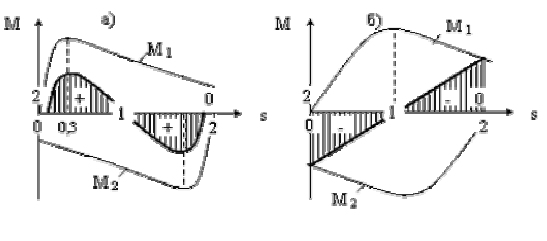
Рис. 1.14.
Механические характеристики однофазного
двигателя с
![]() (а) и
(а) и ![]() (б)
(б)
Таким
образом, критические скольжения
асинхронных исполнительных двигателей
должны быть равными или большими единицы.
В реальных двигателях
![]() ,
а отдельных случаях даже
,
а отдельных случаях даже![]() .
.
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В
отличии от известной схемы [1], здесь
отсутствуют индуктивные сопротивления
ротора, которыми мы пренебрегли ввиду
их малости по сравнению с активными
сопротивлениями
![]() .
.
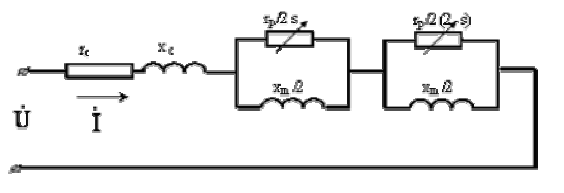
Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
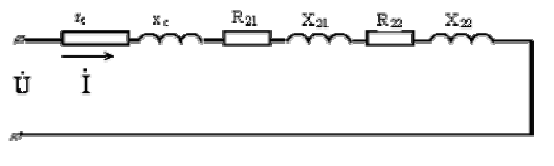
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей
![]()
Самоход
будет отсутствовать, если электромагнитная
мощность машины будет равна нулю или
даже отрицательной, т.е. ![]() .
Это приводит к условию
.
Это приводит к условию
![]() (1.12)
(1.12)
Полные сопротивления вторичного контура преобразованных схем замещения
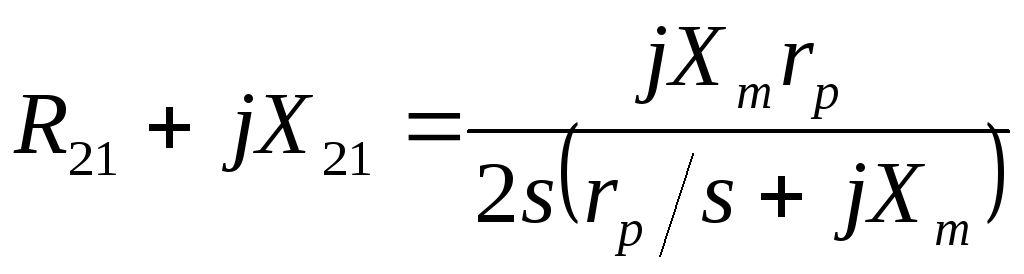
![]()
Их активные составляющие соответственно
 ;
;
Подставляя
значения ![]() и
и![]() в
(1.12), получим
в
(1.12), получим
![]()
Если
учесть, что для режима электромагнитного
тормоза начальное скольжение
![]() ,
окончательно
,
окончательно
![]()
Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.