

22.2. Асинхронный тахогенератор
Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой – генераторной обмотки (ГО) снимается выходное напряжение (рис. 4.1).
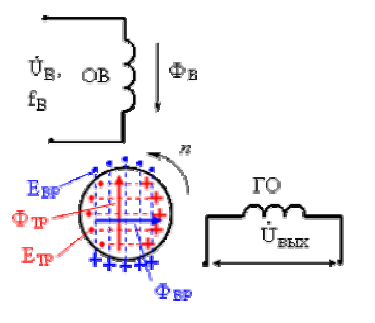
Рис. 4.1. К вопросу о принципе действия асинхронного тахогенератора
Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах).
При
питании обмотки возбуждения переменным
током частоты
![]() возникает
пульсирующий магнитный поток
возникает
пульсирующий магнитный поток
![]() ,
который во вращающемся роторе индуцирует
два вида ЭДС: трансформаторную ЭДС –
,
который во вращающемся роторе индуцирует
два вида ЭДС: трансформаторную ЭДС –
![]() (показана
внутри ротора) и ЭДС вращения –
(показана
внутри ротора) и ЭДС вращения –
![]() (показана снаружи ротора).
(показана снаружи ротора).
В
контурах, перпендикулярных оси обмотки
возбуждения, под действием трансформаторной
ЭДС протекают токи и возникает поток
![]() ,
который в соответствии с принципом
Ленца направлен встречно потоку обмотки
возбуждения, однако его действие
компенсируется увеличением тока
возбуждения. Так как ось генераторной
обмотки перпендикулярна потоку
,
который в соответствии с принципом
Ленца направлен встречно потоку обмотки
возбуждения, однако его действие
компенсируется увеличением тока
возбуждения. Так как ось генераторной
обмотки перпендикулярна потоку
![]() ,
он не будет индуцировать в ней никакой
ЭДС.
,
он не будет индуцировать в ней никакой
ЭДС.
В
контурах, параллельных оси обмотки
возбуждения, но теперь уже под действием
ЭДС вращения тоже протекают токи, которые
создают свой поток
![]() .
Он, пульсируя по оси генераторной
обмотки, и наводит в ней выходную ЭДС.
.
Он, пульсируя по оси генераторной
обмотки, и наводит в ней выходную ЭДС.
Если
принять, что магнитный поток возбуждения
является гармонической функцией времени
![]() ,
то мгновенное значение ЭДС вращения
будет
,
то мгновенное значение ЭДС вращения
будет![]() .
Ток, созданный этой ЭДС,
.
Ток, созданный этой ЭДС,![]() .
(Индуктивным сопротивление ротора можно
пренебречь, поскольку он немагнитный,
да к тому же выполнен из материала с
высоким удельным сопротивлением). При
отсутствии насыщения магнитный поток
пропорционален току
.
(Индуктивным сопротивление ротора можно
пренебречь, поскольку он немагнитный,
да к тому же выполнен из материала с
высоким удельным сопротивлением). При
отсутствии насыщения магнитный поток
пропорционален току![]() .
Тогда мгновенное значение выходной ЭДС
будет
.
Тогда мгновенное значение выходной ЭДС
будет![]() .
Угловая частота сети
.
Угловая частота сети![]() .
Так как ЭДС изменяется по гармоническому
закону, ее действующее значение будет
.
Так как ЭДС изменяется по гармоническому
закону, ее действующее значение будет
![]() .
.
Таким образом, величина выходной ЭДС асинхронного тахогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения.
При
подключении нагрузки выходное напряжение
![]() станет
меньше ЭДС
станет
меньше ЭДС
![]() на
величину внутреннего падения напряжения
на
величину внутреннего падения напряжения
![]()
![]()
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики [1]
(4.2)
где
![]() – коэффициент трансформации АТГ; –
напряжение возбуждения;
– коэффициент трансформации АТГ; –
напряжение возбуждения;![]() – относительная частота вращения;
– относительная частота вращения;![]() и
и![]() – комплексные коэффициенты, зависящие
от величины и характера нагрузки
– комплексные коэффициенты, зависящие
от величины и характера нагрузки![]() ,
от параметров схемы замещения АТГ.
,
от параметров схемы замещения АТГ.
Как
следует из выражения (4.2), выходное
напряжение
![]() не
является линейной функцией относительной
угловой скорости вращения
не
является линейной функцией относительной
угловой скорости вращения
![]() .
Нелинейность создает квадратичная
зависимость
.
Нелинейность создает квадратичная
зависимость![]() .
Если
.
Если![]() ,
то
,
то
![]() становится
пропорциональным
становится
пропорциональным
![]() ,
а тахогенератор считаетсяидеальным.
При проектировании АТГ выражение
,
а тахогенератор считаетсяидеальным.
При проектировании АТГ выражение
![]() стремятся уменьшить как за счет уменьшения
стремятся уменьшить как за счет уменьшения![]() так
и за счет уменьшения
так
и за счет уменьшения
![]() .
.
Так
как
![]() ,
то с целью уменьшения
,
то с целью уменьшения![]() тахогенераторы проектируют на большую
частоту
тахогенераторы проектируют на большую
частоту![]() .
Правда при этом не уменьшают
.
Правда при этом не уменьшают
![]() ,
поскольку при
,
поскольку при
![]() ,
слабее проявляется магнитная несимметрия
машины. Обычно
,
слабее проявляется магнитная несимметрия
машины. Обычно
![]() .
.
Комплексный коэффициент В [1]:
![]() ,
,
где
![]() – полное сопротивление обмотки
возбуждения статора АТГ. Ясно, что с
увеличением
– полное сопротивление обмотки
возбуждения статора АТГ. Ясно, что с
увеличением ![]() ,
коэффициент
,
коэффициент
![]() будет
уменьшаться. Вот почему ротор АТГ
выполняют из материала с высоким удельным
сопротивлением (фосфористой или
марганцевой бронзы, манганина и др.)!
Повышению линейности выходной
характеристики способствует и работа
при больших сопротивлениях нагрузки
будет
уменьшаться. Вот почему ротор АТГ
выполняют из материала с высоким удельным
сопротивлением (фосфористой или
марганцевой бронзы, манганина и др.)!
Повышению линейности выходной
характеристики способствует и работа
при больших сопротивлениях нагрузки
![]() .
К уменьшению
.
К уменьшению
![]() и
и![]() обычно
не прибегают т.к. первое снижает крутизну
выходной характеристики, а второе –
увеличивает габариты АТГ.
обычно
не прибегают т.к. первое снижает крутизну
выходной характеристики, а второе –
увеличивает габариты АТГ.