

10. Универсальные коллекторные микродвигатели
Универсальными коллекторными микродвигателями (УКД) называются микродвигатели, которые могут работать от сети постоянного и переменного тока. Эти двигатели находят широкое применение в высокоскоростных приводах (кофемолки, пылесосы, электробритвы и т.п.), т.к. позволяют при питании от сети 50 Гц получать весьма значительные скорости вращения (до 30000 об/мин), чего невозможно добиться с помощью синхронных и асинхронных машин при частоте 50 Гц.
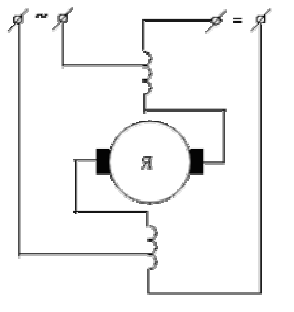
Рис.4.1.Схема включения УКД
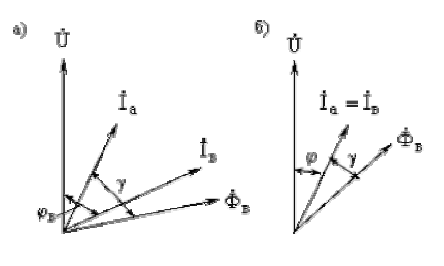
Рис.4.2.Векторные диаграммы двигателей постоянного тока параллельного (а) и последовательного (б) возбуждения при работе на переменном токе
Конструктивно УКД отличаются от машин постоянного тока тем, что у них шихтована вся магнитная система (якорь, полюса, станина); обмотка возбуждения имеет дополнительные отводы и располагается по обеим сторонам от якоря (рис.4.1).
УКД всегда выполняются с последовательным возбуждением без дополнительных полюсов.
Если двигатель постоянного тока параллельного или последовательного возбуждения питать переменным током, двигатель будет развивать вращающий момент определенного направления, поскольку токи якоря и возбуждения будут изменять свои знаки одновременно. Другое дело, что вследствие большой индуктивности параллельной обмотки возбуждения, ток возбуждения будет значительно отставать от напряжения. В результате между током якоря и потоком возбуждения окажется большой угол сдвига, и среднее значение момента станет небольшим. На рис. 4.2 приведены упрощенные векторные диаграммы двигателей параллельного и последовательного возбуждения при работе на переменном токе. Сравнивая эти диаграммы, легко сделать вывод, что УКД с последовательным возбуждение будет более рационален, чем с параллельным.
Работа УКД на постоянном токе ничем не отличается от работы обычного двигателя, а вот на переменном токе есть ряд особенностей.
1.Электромагнитный
момент.
Будем считать, что ток якоря
![]() и магнитный поток
и магнитный поток![]() являются гармоническими функциями
времени (рис.4.3)
являются гармоническими функциями
времени (рис.4.3)
![]() ;
;
![]() ,
(4.1)
,
(4.1)
где
![]() – угол, на который ток якоря опережает
поток возбуждения (рис. 4.4).
– угол, на который ток якоря опережает
поток возбуждения (рис. 4.4).
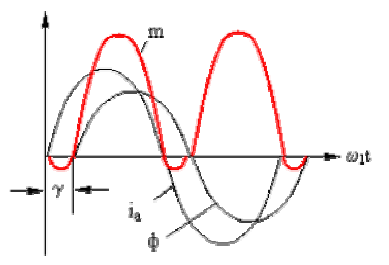
Рис. 4.3.Графики тока, магнитного потока и момента УКД при работе
от сети переменного тока
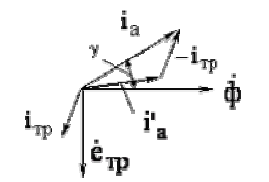
Рис. 4.4. К
вопросу об угле
![]() .
.![]() –
составляющая тока, опережающая
поток
только из–за потерь в стали
–
составляющая тока, опережающая
поток
только из–за потерь в стали
Как
известно из общего курса электрических
машин, ток, создающий магнитный поток,
кроме намагничивающей составляющей
всегда содержит небольшую активную
составляющую, необходимую для покрытия
потерь в стали. По этой причине ток
опережает поток на небольшой угол (его
называют «угол магнитных потерь»; он
порядка
![]() ).
В случае универсального коллекторного
двигателя ток якоря будет опережать
магнитный поток на больший угол (порядка
).
В случае универсального коллекторного
двигателя ток якоря будет опережать
магнитный поток на больший угол (порядка![]() ),
так как он содержит дополнительную
составляющую
),
так как он содержит дополнительную
составляющую![]() ,
необходимую для компенсации
размагничивающего действия коммутирующей
секции (рис. 4.4).
,
необходимую для компенсации
размагничивающего действия коммутирующей
секции (рис. 4.4).
Мгновенное значение электромагнитного момента
 (4.2)
(4.2)
Из рис. 4.3 и формулы (4.2) видно, что момент имеет две составляющие:
• постоянную
![]()
• и переменную, изменяющуюся с двойной частотой
![]()
Из графика момента на рис. 4.3 видно, что в отдельные промежутки времени момент становится даже отрицательным.
Среднее значение момента
Отрицательные значения момента и его пульсации вследствие большой частоты и значительных маховых масс вращающихся частей практически не сказываются на равномерности вращения двигателя. Однако в приводах, где требуется высокая стабильность мгновенной скорости, с ней нельзя не считаться.
2.Номинальная частота вращения. Формула частоты вращения двигателя на постоянном токе хорошо известна:
![]() (4.3)
(4.3)
На переменном токе структура формулы такая же,
![]() (4.4)
(4.4)
но
в числителе формулы (4.4) появляется
дополнительное падение напряжения ![]() .
В результате частота вращения уменьшается.
Чтобы уравнять частоты вращения на
постоянном и переменном токе при
номинальной нагрузке, часть витков
обмотки возбуждения при питании
переменным током отключают, что приводит
к уменьшению магнитного потока и
выравниванию скоростей (см. скоростную
характеристику, показанную на рис.4.5,
где сплошные линии обозначают работу
на постоянном токе, а пунктирные – на
переменном токе).
.
В результате частота вращения уменьшается.
Чтобы уравнять частоты вращения на
постоянном и переменном токе при
номинальной нагрузке, часть витков
обмотки возбуждения при питании
переменным током отключают, что приводит
к уменьшению магнитного потока и
выравниванию скоростей (см. скоростную
характеристику, показанную на рис.4.5,
где сплошные линии обозначают работу
на постоянном токе, а пунктирные – на
переменном токе).
В связи с уменьшением магнитного потока при работе на переменном токе магнитная система двигателя оказывается слабо насыщенной, поэтому скоростная характеристика приближается к гиперболической, а токовая – к параболической.
Ток якоря при работе двигателя от сети переменного тока становится больше, чем при работе от сети постоянного тока из–за наличия реактивной составляющей и большей активной составляющей вследствие возрастания потерь в стали. По этим же причинам КПД машины получается меньшим.
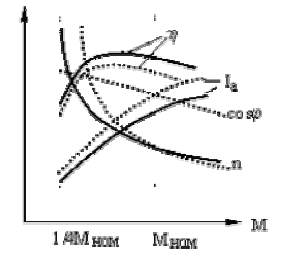
Рис.4.5. Рабочие характеристики УКД
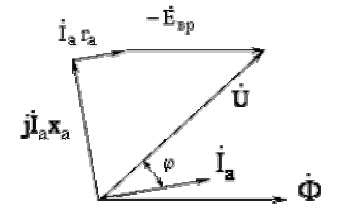
Рис.4.6. Векторная диаграмма УКД при работе на переменном токе
Уравнение напряжения двигателя на переменном токе значительно сложнее, чем на постоянном токе, т.к. приходится учитывать ЭДС, которые индуцируются в обмотке якоря и обмотке возбуждения пульсирующим полем возбуждения, полем поперечной реакции якоря, полями рассеяния. Но если пренебречь насыщением и потерями в стали, выразить ЭДС через ток и соответствующие индуктивные сопротивления, уравнение напряжения можно привести к виду
![]() (4.5)
(4.5)
где
![]() и
и
![]() –
активные и реактивные сопротивления
якорной цепи.
–
активные и реактивные сопротивления
якорной цепи.
По уравнению (4.5) на рис. 4.6 построена векторная диаграмма УКД при работе на переменном токе.
3. Коммутация. При работе на переменном токе в коммутирующей секции кроме реактивной ЭДС наводится еще и трансформаторная ЭДС, т.к. секция пронизывается пульсирующим потоком возбуждения (рис.4.7,а).
Реактивная ЭДС совпадает с током якоря. Трансформаторная ЭДС, будучи производной магнитного потока, перпендикулярна ему (рис. 4.7,б). В этих условиях результирующая ЭДС коммутирующей секции может достигать весьма больших значений, особенно в период пуска, когда ток якоря наибольший. По указанным причинам коммутация машины на переменном токе заметно ухудшается по сравнению с работой на постоянном токе.
Установка дополнительных полюсов позволила бы скомпенсировать реактивную ЭДС. Трансформаторную же ЭДС скомпенсировать нельзя. При этом дополнительные полюса и компенсационные обмотки усложнили бы конструкцию машины, поэтому в микродвигателях они не применяются.
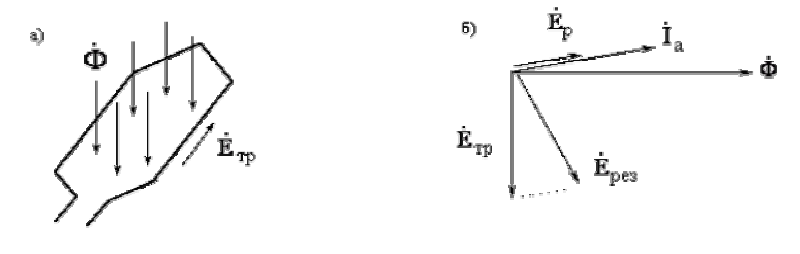
Рис. 4.7. Возникновение трансформаторной ЭДС в коммутируемой секции (а) и векторная
диаграмма ЭДС коммутируемой секции (б)
Частота вращения УКМД регулируется так же, как и в любом двигателе последовательного возбуждения: либо изменением подводимого напряжения, либо шунтированием обмотки якоря или обмотки возбуждения.
К числу недостатков универсальных коллекторных двигателей, кроме отмеченных выше, следует отнести радиопомехи и значительный шум, создаваемый ими при работе с высокой скоростью вращения.
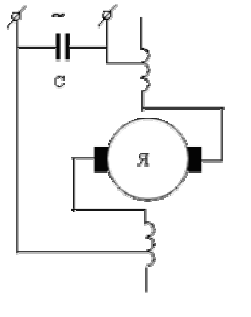
Рис. 4.8. Схема простейшего фильтра
Для борьбы с радиопомехами выполняют экранирование машины и симметрирование обмотки возбуждения, применяют электрические фильтры.
Корпус машины уже является экраном и поэтому в известном смысле поглощает радиопомехи. Со стороны коллектора часто на торец корпуса надевают защитный металлический колпак, вентиляционные отверстия закрывают медной или латунной сеткой, а выступающий конец вала замыкают специальной щеткой на корпус двигателя. Внутренние соединения обмоток выполняют экранированным проводами, причем экран соединяют с заземленным корпусом. Симметрирование обмотки возбуждения сводится к выполнению ее по обе стороны от якоря.
В простейшем виде электрический фильтр представляет собой конденсатор, включенный между проводами сети (рис.4.8).
Вопросы:
1)При каком условии график мгновенных значений момента не будет содержать
отрицательных составляющих?
2)Почему
с ростом нагрузки
![]() двигателя уменьшается?
двигателя уменьшается?