

17. Исполнительные двигатели постоянного тока
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических, а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.
17.1 Якорное управление исполнительным двигателем

Рис. 17.1. Схема включения исполнительного двигателя при якорном управлении
Схема
включения двигателя с якорным управлением
показана на рис. 2.1. Напряжение возбуждения
подается на обмотку полюсов, напряжение
управления – на обмотку якоря. Коэффициент
сигнала a здесь равен
![]() .
Для двигателей с постоянными магнитами
.
Для двигателей с постоянными магнитами![]() .
Регулирование частоты вращения
осуществляется изменением напряжения
управления.
.
Регулирование частоты вращения
осуществляется изменением напряжения
управления.
При
отсутствии насыщения
![]() ,
а поскольку
,
а поскольку![]() ,
магнитный поток возбуждения также
остается постоянным, т.е.
,
магнитный поток возбуждения также
остается постоянным, т.е. ![]() .
.
Ток якоря
![]() ,
,
где
![]() – ЭДС якоря;
– ЭДС якоря;![]() –
сопротивление якорной цепи.
–
сопротивление якорной цепи.
Вращающий момент двигателя
![]()
Выразим
момент в относительных единицах, приняв
за базовый момент пусковой момент,
развиваемый двигателем при
![]() и
и
![]()
![]()
Тогда
относительное значение момента
![]()
![]() (17.1)
(17.1)
Частота
вращения при холостом ходе (
![]() и
и![]() )
)
![]() (17.2)
(17.2)
Откуда
находим ![]() .
Подставляя это значение в (2.1), получим
.
Подставляя это значение в (2.1), получим
![]() (17.3)
(17.3)
где
![]() –
относительная частота вращения двигателя.
–
относительная частота вращения двигателя.
![]() (17.4)
(17.4)
Уравнение
(2.3) есть уравнение механической
характеристики
исполнительного
двигателя при якорном управлении. Решив
его относительно
![]() ,
получим уравнение регулировочной
характеристики.
,
получим уравнение регулировочной
характеристики.
Механическая
мощность в относительных единицах
![]() .
Угловую скорость, при которой наступает
максимум мощности, найдем известным
приемом
.
Угловую скорость, при которой наступает
максимум мощности, найдем известным
приемом![]() ,
откуда
,
откуда![]() ,
а максимальное значение механической
мощности будет
,
а максимальное значение механической
мощности будет
![]()
Мощность управления
Приняв
за базовую единицу мощность управления
при коротком замыкании
![]()
![]()
![]()
![]() .
Получим мощность управления в относительных
единицах.
.
Получим мощность управления в относительных
единицах.
Мощность возбуждения
![]()
На рис. 17.2,а представлены механические, на рис. 17.2,б – регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления.
Механические характеристики линейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала
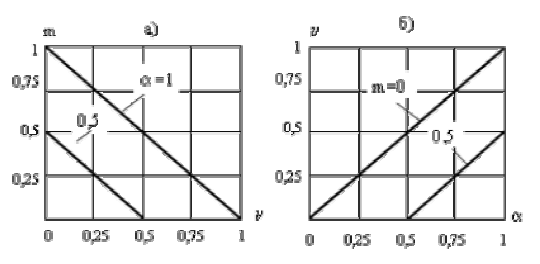
Рис.17.2. Механические (а) и регулировочные (б) характеристики исполнительного
двигателя постоянного тока при якорном управлении
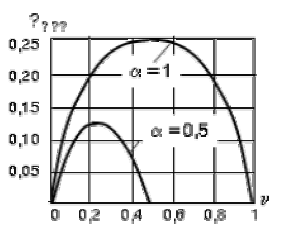
Рис. 17.3. Зависимость механической мощности от скорости вращения
при якорном управлении
Регулировочные характеристики линейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления.
Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока.
В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей.
Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же – она небольшая по величине, что также характерно для машин постоянного тока.
Максимум
механической мощности в сильной степени
зависит от коэффициента сигнала и даже
при
![]() не превышает 1/4 базовой мощности.
не превышает 1/4 базовой мощности.