

12. Тихоходные двигатели
В технике часто возникает потребность в двигателях с низкими скоростями вращения (от единиц до нескольких десятков оборотов в минуту) без использования механических редукторов. Применение редукторов нежелательно по причинам их повышенного шума, значительных масс и габаритов, люфтов и ряда других отрицательных последствий. Малые скорости вращения микродвигателей можно получить следующими принципиально разными способами:
1)выполнением
дробных обмоток, т.е. обмоток с числом
пазов на полюс и фазу
![]() ;
;
2)использованием принципа электромагнитной редукции;
3)выполнением двигателей с катящимся или волновым ротором.
12.1. Дробные обмотки
Получение
малых скоростей путем увеличения числа
пар полюсов (при
![]() )
в микромашинах невозможно из–за
ограниченных габаритов последних. Это
тем более затруднительно, что во многих
случаях они выполняются на повышенные
частоты (200, 400 и более герц). Использование
обмоток с
)
в микромашинах невозможно из–за
ограниченных габаритов последних. Это
тем более затруднительно, что во многих
случаях они выполняются на повышенные
частоты (200, 400 и более герц). Использование
обмоток с
![]() позволяет решить задачу. Однако не
всякое значение q даст положительный
результат.
позволяет решить задачу. Однако не
всякое значение q даст положительный
результат.
В нашем случае число пазов на полюс и фазу можно записать в виде
![]() ,
(6.1)
,
(6.1)
где:
![]() – число пазов статора;
– число пазов статора;![]() – число пар полюсов;
– число пар полюсов;![]() – число фаз;
– число фаз;![]() и
и![]() – положительные числа.
– положительные числа.
Для того чтобы получить удовлетворительные обмотки, надо выполнить ряд условий:
1)
![]() и
и![]() должны быть несократимыми числами;
должны быть несократимыми числами;
2)знаменатель
дроби
![]() не должен быть кратным числу фаз. Другими
словами, для трехфазных обмоток
не должен быть кратным числу фаз. Другими
словами, для трехфазных обмоток![]() не должно быть кратным 3, а для двухфазных
– четным числом;
не должно быть кратным 3, а для двухфазных
– четным числом;
3)
![]() и
и![]() связаны соотношением , где
связаны соотношением , где![]() –
целое число.
–
целое число.
Иногда
возникает задача выполнить обмотку с
максимальным числом пар полюсов в
статоре с заданным числом пазов
![]() .
Тогда
.
Тогда
![]() .
(6.2)
.
(6.2)
В
этом случае числитель дроби
![]() выбирается
из условия
выбирается
из условия
![]() (6.3)
(6.3)
Кривая
НС обмоток с дробным
![]() содержит большое число высших гармоник.
Причем, чем ближе
содержит большое число высших гармоник.
Причем, чем ближе![]() к предельному значению, тем ярче выражены
эти гармоники. Поэтому значительная
часть момента двигателя теряется на
преодоление тормозных составляющих.
Энергетические показатели таких
двигателей, как правило, невысокие.
к предельному значению, тем ярче выражены
эти гармоники. Поэтому значительная
часть момента двигателя теряется на
преодоление тормозных составляющих.
Энергетические показатели таких
двигателей, как правило, невысокие.
В
качестве примера выполним двухфазную
обмотку с числом пазов
![]() и максимально возможным числом пар
полюсов.
и максимально возможным числом пар
полюсов.
Решая (6.2), получаем
![]() .
.
Из
условия (6.3) находим числитель дроби
![]() :
:
![]() ,
т.е.
,
т.е.
![]() .
.
Следовательно
![]() .
.
Шаг обмотки по пазам
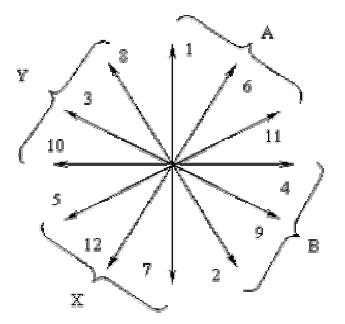
Рис. 6.1. Звезда пазовых ЭДС
Находим угол сдвига пазовых ЭДС в электрических градусах
![]() .
.
Строим звезду пазовых ЭДС (рис. 6.1) и разбиваем ее на фазные зоны (в нашем случае на
4) Рисуем пазы, указываем направление токов, приняв, что в зонах Y, A они текут вверх, а в зонах B, X – вниз (рис. 6.2)
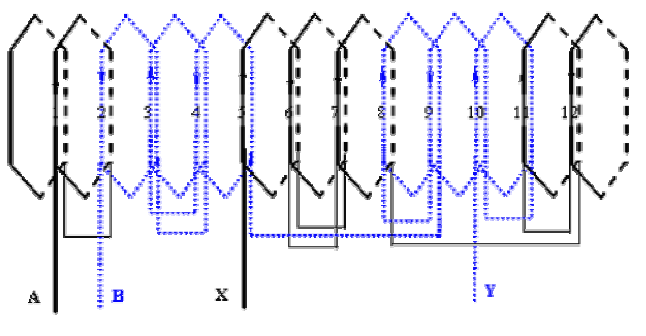
Рис. 6.2. Схема
дробной обмотки (![]() )
)
Наконец соединяем катушки наиболее короткими перемычками и получаем нужную обмотку.
На
рис. 6.3 для момента времени, когда ток в
фазах А и Y равен
![]() ,
построена диаграмма НС. Видно, что кривая
намагничивающих сил далеко не
синусоидальная, т.е. она содержит большое
число ярко выраженных гармоник. Однако
обмотка все–таки создает магнитное
поле с 10 полюсами.
,
построена диаграмма НС. Видно, что кривая
намагничивающих сил далеко не
синусоидальная, т.е. она содержит большое
число ярко выраженных гармоник. Однако
обмотка все–таки создает магнитное
поле с 10 полюсами.
Задачи:
1) Построить кривую НС для момента времени, когда ток в фазе А максимальный, а в фазе В равен нулю.
2)
Перечислить все возможные значения
дробного
![]() ,
если
,
если
![]() ,
,
![]() .
При каком
.
При каком
![]() гармонический
состав поля будет наиболее благоприятным?
гармонический
состав поля будет наиболее благоприятным?
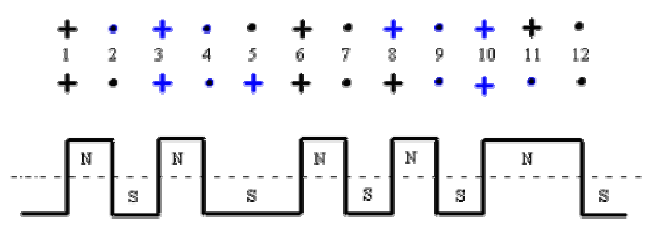
Рис. 6.3. Кривая
намагничивающих сил дробной обмотки
(![]() )
)