

20.2. Симметрирование синусно–косинусных поворотных трансформаторов.
С целью устранения искажающего действия поперечного потока Фq, осуществляют так называемое симметрирование поворотного трансформатора. Оно может быть первичным и вторичным.
Первичное
симметрирование
выполняется со стороны статора и
заключается в замыкании компенсационной
обмотки на какое–то сопротивление или
накоротко (рис. 6.4). Условием первичного
симметрирования является равенство
(симметрия) полных сопротивлений цепи
обмотки возбуждения и цепи компенсационной
обмотки:
![]() ,
где
,
где![]() – сопротивление источника. Поскольку
– сопротивление источника. Поскольку
![]() ,
условие симметрии выливается в равенство
,
условие симметрии выливается в равенство
![]() .
Если принять, что внутренне сопротивление
мощного источника равно нулю
.
Если принять, что внутренне сопротивление
мощного источника равно нулю ![]() ,
то и
,
то и ![]() ,
т.е. первичное симметрирование сводится
к замыканию компенсационной обмотки
накоротко.
,
т.е. первичное симметрирование сводится
к замыканию компенсационной обмотки
накоротко.
Сущность
первичного симметрирования состоит в
том, что поперечный поток
![]() ,
пульсируя по оси компенсационной
обмотки, индуцирует в ней ЭДС и ток,
который создает магнитный поток
,
пульсируя по оси компенсационной
обмотки, индуцирует в ней ЭДС и ток,
который создает магнитный поток![]() ,
направленный встречно потоку
,
направленный встречно потоку![]() (рис.6.4,б). В результате поток
(рис.6.4,б). В результате поток![]() и его искажающее действие в значительной
мере уменьшаются.
и его искажающее действие в значительной
мере уменьшаются.

Рис.6.4. К вопросу о первичном симметрировании СКПТ
Достоинством
первичного симметрирование является
то, что при изменении нагрузки
автоматически изменяется величина
потока
![]() ,
вследствие чего степень компенсации
потока
,
вследствие чего степень компенсации
потока![]() остается практически постоянной.
остается практически постоянной.
Недостатком первичного симметрирования служит зависимость тока возбуждения СКПТ от угла поворота ротора
![]()
Вторичное
симметрирование выполняется со стороны
ротора в том случае, когда нагрузка
подключается только к одной обмотке,
например к синусной. Оно заключается в
замыкании второй роторной обмотки на
сопротивление
![]() (рис. 6.5,а). Его сущность состоит в том,
что поперечные составляющие потоков
(рис. 6.5,а). Его сущность состоит в том,
что поперечные составляющие потоков![]() и
и![]() всегда направлены встречно и при
правильном выборе
всегда направлены встречно и при
правильном выборе![]() в значительной мере ослабляют друг
друга (рис. 6.5,б).
в значительной мере ослабляют друг
друга (рис. 6.5,б).
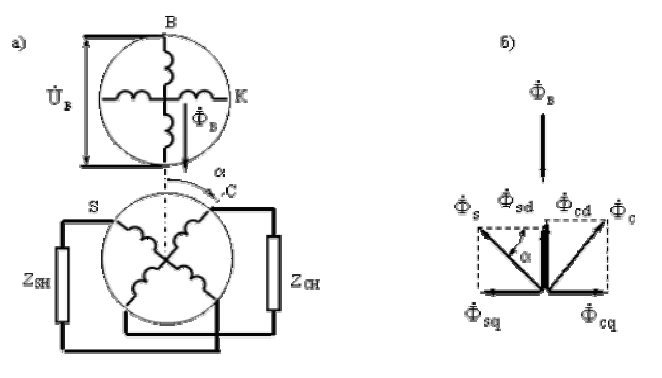
Рис.6.5. К вопросу о вторичном симметрировании СКПТ
При
выполнении вторичного симметрирования
![]() или
или
![]()
Выразим токи роторных обмоток через ЭДС и сопротивления
![]()
При
отсутствии поперечных потоков, учитывая
![]()
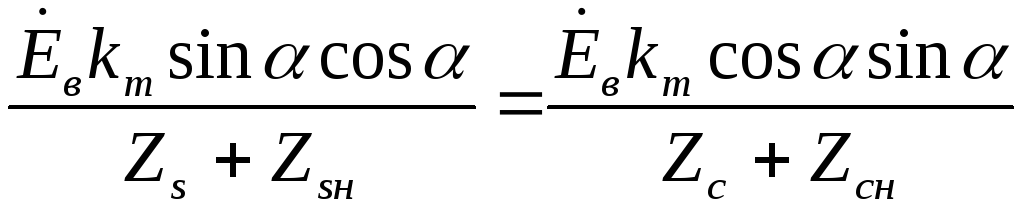
Из
этого уравнения следует, что для
осуществления вторичного симметрирования
необходимо, чтобы симметрирующее
сопротивление ![]() было равно сопротивлению нагрузки
было равно сопротивлению нагрузки ![]() .
.
Недостаток вторичного симметрирования заключается в том, что оно практически выполнимо только при постоянной нагрузке. Достоинством служит независимость тока возбуждения от угла поворота ротора
![]()
![]()
Здесь
![]() и
и
![]() –
сопротивление роторной обмотки и
сопротивление нагрузки, поскольку
–
сопротивление роторной обмотки и
сопротивление нагрузки, поскольку ![]() =
=
![]() и
и ![]() =
=![]() .
.
На практике, там, где это возможно, выполняют одновременно и первичное и вторичное симметрирование СКПТ (рис. 6.6), добиваясь почти полного уничтожения искажающего действия поперечного потока ротора.
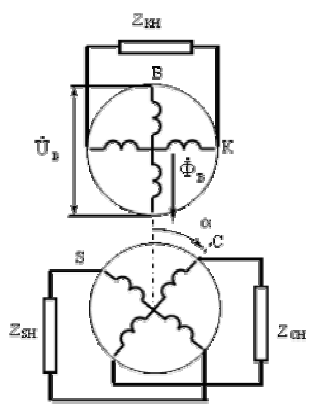
Рис.6.6. Первичное и вторичное симметрирование СКПТ
21. Импульсное управление исполнительным двигателем постоянного тока
В
связи с развитием полупроводниковой
техники все шире применяется импульсное
управление исполнительным двигателем.
Суть его заключается в том, что частоту
вращения двигателя регулируют не
величиной постоянно подводимого
напряжения, а длительностью питания
двигателя номинальным напряжением.
Одна из возможных схем импульсного
управления приведена на рис. 2.7,а.
Там же (рис. 2.7,б)
показаны графики скорости при различных
![]() .
.
В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
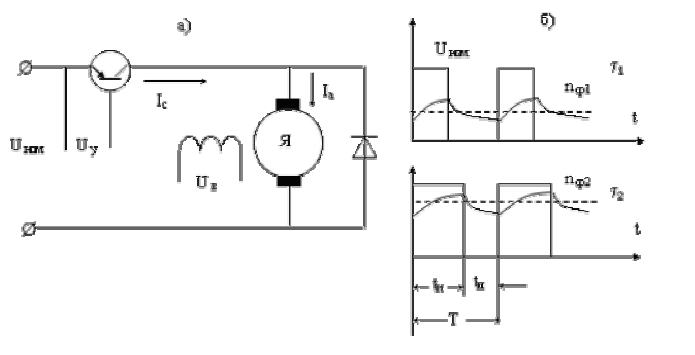
Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б)
при разных τ (τ2 > τ1)
Работа
двигателя состоит из чередующихся
периодов разгона и торможения. И, если
эти периоды малы по сравнению с
электромагнитной постоянной времени
якорной цепи
![]() ,
устанавливается некая средняя скорость,
однозначно определяемая относительной
продолжительностью включения (скважностью)
,
устанавливается некая средняя скорость,
однозначно определяемая относительной
продолжительностью включения (скважностью)![]() ,
где
,
где![]() – длительность импульса напряжения;
– длительность импульса напряжения;
![]() – период.
– период.
Частота управляющих импульсов составляет 200–400 Гц, в результате период управления Т оказывается на 2 порядка меньше электромагнитной постоянной времени обмотки якоря
![]()
Управление,
при котором изменяется соотношение
длительности импульса
![]() и
паузы
и
паузы
![]() при
постоянном периоде
при
постоянном периоде
![]() ,
называетсяширотно–импульсным.
,
называетсяширотно–импульсным.
Если
параметры схемы подобраны так, что
колебания тока, момента и угловой
скорости вращения небольшие, работа
двигателя практически не отличается
от работы при постоянном напряжении,
за которое можно принять среднее
напряжение за период управления
![]() :
:
![]() .
.
Оперируя средними значениями, получим уравнение, аналогичное (2.4), поскольку в данном случае мы имеем якорное управление
![]() .
.
На
рис. 2.8,а
показаны
графики тока сети
![]() и тока якоря
и тока якоря![]() при относительно больших нагрузках.
При малых нагрузках ток двигателя
становится небольшим и появляются
периоды, когда при закрытом электронном
ключе ток якоря уменьшается до нуля.
Говорят, наступил режим прерывистых
токов (рис.2.8,б).
Механические характеристики приобретают
перелом и становятся похожими на
характеристики двигателя при регулировании
реостатом в цепи якоря. В общем случае
они имеют вид, представленный на рис.
2.9. Зона, соответствующая прерывистым
токам, ограничена пунктирной линией.
при относительно больших нагрузках.
При малых нагрузках ток двигателя
становится небольшим и появляются
периоды, когда при закрытом электронном
ключе ток якоря уменьшается до нуля.
Говорят, наступил режим прерывистых
токов (рис.2.8,б).
Механические характеристики приобретают
перелом и становятся похожими на
характеристики двигателя при регулировании
реостатом в цепи якоря. В общем случае
они имеют вид, представленный на рис.
2.9. Зона, соответствующая прерывистым
токам, ограничена пунктирной линией.
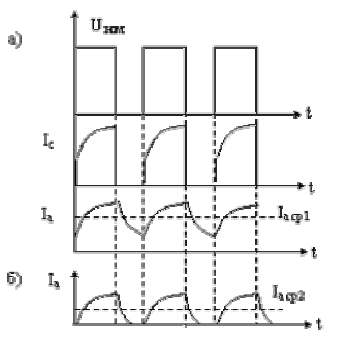
Рис. 2.8. Графики
тока сети
![]() и
тока якоря
и
тока якоря ![]() при больших
нагрузках (а) и тока якоря при
при больших
нагрузках (а) и тока якоря при
малых нагрузках (б)
Критическая относительная частота вращения, при которой наступает перелом, равна
![]()
![]() ,
,
где
![]() ;
;![]() ;
;![]() .
.
Основное преимущество импульсного управления заключается в уменьшении средней потребляемой мощности за счет уменьшения среднего тока.