

16.2. Уравнения токов и схемы замещения асинхронных исполнительных двигателей
В общем случае асинхронный исполнительный двигатель является несимметричной двухфазной машиной, для которой можно нарисовать известные четыре схемы замещения. Например, для обмотки управления они имеют следующий вид (рис. 1.3)
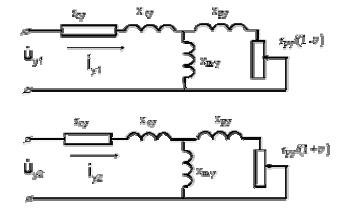
Рис. 1.3. Схемы замещения обмотки управления
Здесь:
![]() ;
;![]() ,
где
,
где![]() – относительная частота вращения.
– относительная частота вращения.
Эти
схемы позволяют получить уравнения
токов, по которым можно вывести уравнения
механических, регулировочных и прочих
характеристик. Однако, полученные
уравнения будут слишком громоздкими.
Для асинхронного исполнительного
двигателя ситуацию можно существенно
упростить, если в схемах замещения
пренебречь всеми сопротивлениями, кроме
активного сопротивления ротора
![]() .
Такие схемы, да и сами двигатели, будем
называть "идеальными" (рис.1.4).
Основанием для идеализации служит тот
факт, что исполнительные двигатели
выполняются с роторами, имеющими большое
активное сопротивление.
.
Такие схемы, да и сами двигатели, будем
называть "идеальными" (рис.1.4).
Основанием для идеализации служит тот
факт, что исполнительные двигатели
выполняются с роторами, имеющими большое
активное сопротивление.
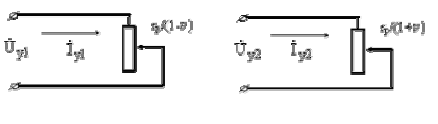
Для последних схем замещения уравнения токов принимают вид:
![]() ;
;
![]() (16.1)
(16.1)
16.3. Характеристики асинхронного исполнительного двигателя при разных способах управления
![]() ,
,![]() Свойства
и поведение асинхронного исполнительного
двигателя определяются механическими
и регулировочными характеристиками.
Свойства
и поведение асинхронного исполнительного
двигателя определяются механическими
и регулировочными характеристиками.
В общем случае напряжения и образуют несимметричную систему векторов (рис.1.5).
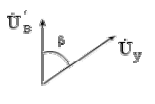
Рис. 1.5.
Используя понятие эффективного коэффициента сигнала, можно записать
![]()
![]()
![]()
Симметричные составляющие напряжения управления будут:
Переходя
от показательных функций к тригонометрическим
и учитывая, что ![]() ,
подставим полученные значения
,
подставим полученные значения ![]() и
и ![]() в (1.1)
в (1.1)
![]()
![]() (16.2)
(16.2)
Электромагнитная
мощность с точки зрения передачи энергии
со статора на ротор представляет собой
сумму электромагнитных мощностей прямой
и обратной последовательностей. При
круговом поле они равны потерям в роторе,
деленным на скольжения /в нашем случае
на
![]() и
и
![]() /
/
![]()
Так как по отношению к полю прямой последовательности машина работает в режиме двигателя, а по отношению к полю обратной последовательности в режиме электромагнитного тормоза, то результирующий момент М равен
![]()
Подставим
в это уравнение квадраты модулей токов
![]() и
и
![]() из
(1.2). После преобразований, получим:
из
(1.2). После преобразований, получим:

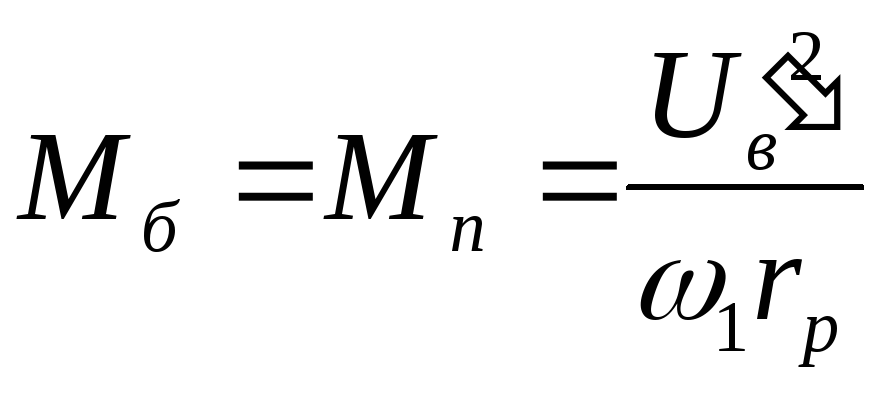
Выразим
момент двигателя в относительных
единицах. За базисный возьмем пусковой
момент, развиваемый двигателем при
круговом поле (![]() ,
,
![]() ,
,
![]() )
)
Тогда
момент в относительных единицах
![]()
![]() (16.3)
(16.3)
Уравнение (1.3) есть аналитическое выражение механических характеристик идеального асинхронного исполнительного двигателя, под которыми понимают зависимость момента от угловой скорости вращения при постоянном коэффициенте сигнала.
Решив
уравнение (1.3) относительно
![]() ,
получим выражениерегулировочных
характеристик,
которые
показывают зависимость угловой скорости
вращения от коэффициента сигнала при
постоянном моменте на валу
,
получим выражениерегулировочных
характеристик,
которые
показывают зависимость угловой скорости
вращения от коэффициента сигнала при
постоянном моменте на валу
 (16.4)
(16.4)
Рассмотрим механические и регулировочные характеристики а также характеристики мощности при различных способах управления идеальным асинхронным исполнительным двигателем.