

-
Способы управления атс, анализ построения управляющих устройств. Требования, предъявляемые к управляющим устройствам.
Способы управления АТС различаются по следующим признакам:
-
Типу приборов управления (релейное, электронное, смешанное – в состав управляющих устройств (УУ) входят эл.-магн. реле и электронные или магнитные приборы);
-
Организации управления (индивидуальному или централизованному);
-
Способу воздействия сигналов набора на коммутационные устройства (непосредственный и косвенный).
При индивидуальном управлении каждый искатель имеет собственное УУ, при централизованном – УУ группы коммутационных приборов или всей АТС объединяются в общий управляющий комплекс.
При непосредственном управлении (АТС ДШ системы) сигналы набора номера, без накопления, воздействуют на искатель (каждый искатель на каждой ступени искания имеет свой индивидуальный управляющий комплект УК) – применяется прямой способ управления, характеризующийся тем, что установление соединения через коммутационную систему происходит одновременно с выбором соединительного пути (работа управляющих комплектов происходит за счет жесткой функциональной связи между отдельными элементами этого комплекта). (см. рис. 1)
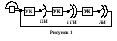
Достоинства: высокая готовность; относительная простота УК.
Недостатки: функционируют только в течение короткого времени установления соединения и бездействуют во время разговора); соединение устанавливается по ступеням искания без учета наличия свободных соединительных путей в последующих соединениях, что приводит к неэффективному использованию коммутационных приборов и УК; УУ не способны к выполнению дополнительных функций, т.к. работают по единственной жестко замонтированной программе.
При косвенном управлениисигналы набора номера накапливаются в специальных устройствах, запоминаются и затем передаются в УУ, которое и воздействует на коммутационное устройство, т.е. набор номера и работа УУ разделены во времени. Косвенное управление м.б. реализовано по замонтированной логике или м.б. программным.
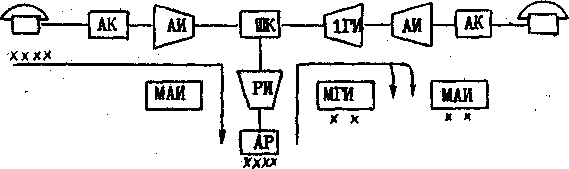
Рис. 2
В АТС координатной системы применяются маркеры – УУ с замонтированной логикой, т.е. программа работы маркера замонтирована в логических связях между функциональными блоками (ФБ) и в схемах ФБ-ов, каждый из которых выполнив свою функцию дает команду к началу действия следующего в логической цепочке ФБ.(рис.3)
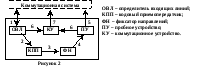
Рисунок 3
1 – определение входящих линий; 2 – прием информации; 3 – расшифровка и передача в ФН; 4 – посылка команды на подключение ПУ к выходам; 5 – проба-определение свободности требуемых выходов; 6 – при свободности выходов – передача информации о входящей и исходящей линии из ОВЛ и ПУ в КУ; 7 – коммутация входа с выходом.
Маркеры управляют искателями используя обходной способ установления соединения, при котором соединение через коммутационную систему (КС) отделено по времени от процесса выбора соединительного пути.
Наибольшая степень централизации УУ с замонтированной логикой достигается при использовании общестанционных маркеров, при этом объем оборудования уменьшается, но по своему устройству они усложняются.
Достоинства: повышается эффективность использования УУ, т.к. оно занято только на время установления (0,1 – 1 с), и обслуживает группу коммутационных приборов; исключает непроизводительные занятия коммутационных приборов.
Недостатки: наличие только одной программы не дает возможности применения дополнительных видов обслуживания, а для изменения программы необходимперемонтаж связей в маркере.
Программные УУ могут быть с замантированной программой и записанной программой.
В УУ с замонтированной программой (рис.4) в целом устранены логические связи между ФБ, и ФБ периферийного УУ становятся исполнителями команд программного устройства (ПУ). ПУ же определяет порядок действия ФБ и берет на себя решение логических задач по установлению соединений по различным алгоритмам. Подача команд из ПУ в ПУУ и прием ответной информации осуществляется через КВВ.
Рисунок 4
Достоинства: большая скорость обработки вызовов; возможность реализации дополнительных видов связи, обслуживания и разделение абонентов по приоритетным группам.
Недостатки: большие затраты на изменение алгоритма функционирования.
Применяется для станций малой и средней емкости, с ограниченным набором команд.
Управление по записанной программе (рис.5) устраняет необходимость многократного обращения к коммутационной периферии.
Вся система управления строится на многопрограммных специализированных машинах в памяти которых записаны программы выполнения всех процессов.

Рисунок 5
Ко всем УУ предъявляются следующие требования: надежность (чем выше надежность, тем меньше отказов в обслуживании вызовов и выше коэффициент готовности САК – системы автоматической коммутации); работа УУ в строгом соответствии с заданными алгоритмами (наличие ошибок приводит к увеличению нагрузки за счет повторных вызовов); высокая скорость обслуживания; повышение эффективности УУ за счет их централизации, что в свою очередь требует увеличения скорости обслуживания УУ.