

Корольов / Теория связи
.pdfкосмические помехи; электризационные помехи; помехи посторонних каналов связи; внутренние шумы.
Атмосферные помехи обусловлены электрическими процессами в атмосфере и, прежде всего, грозовыми разрядами. Энергия этих помех сосредоточена, главным образом, в области ДВ и СВ.
Промышленные помехи возникают из-за резких изменений тока в электрических цепях всевозможных электроустановок. К ним относятся помехи от электротранспорта, электрических моторов, медицинских установок, систем зажигания двигателей и т.д.
Космические помехи создаются радиоизлучением внеземных источников. Они создают общий шумовой фон и в наибольшей степени проявляются на ультракоротких волнах.
Электризационные помехи, часто возникающие во время пурги или песчаной бури, создаются наэлектризованными снежными частицами или песчинками. Эти помехи возникают при скорости ветра свыше 5,5 м/с и ощутимы на частотах ниже 15 МГц.
Помехи посторонних каналов связи – обусловлены работой посторонних радиостанций. С учетом источника происхождения их называют также стационарными. Этот вид помех наиболее характерен для КВ диапазоне.
В зависимости от характера изменения во времени различают флуктуационные, импульсные (сосредоточенные во времени) и узкополосные (сосредоточенные по спектру) помехи.
Флуктуационная помеха представляет собой непрерывное колебание, меняющееся случайным образом. Часто она описывается нормальным законом распределения. Быстрое изменение во времени позволяет заменить реальные флюктуационные помехи так называемым белым шумом - процессом с постоянным спектром.
Импульсные помехи представляет собой случайную последовательность коротких сигналов обычно следующих редко, что реакция приемника на текущий импульс успевает уменьшится до нуля к моменту появления очередного импульса. Типичными примерами таких помех являются сигналы, создаваемые разрядами молний или искрением контактов в электрических двигателях.
Сосредоточенные по спектру помехи занимают сравнительно узкую полосу частот, существенно меньшую полосы частот сигнала. Чаще всего они обусловлены сигналами посторонних радиостанций, или излучениями про-
21
мышленных или медицинских генераторов высокой частоты различного назначения.
В зависимости от характера воздействия различают аддитивную помеху n(t) суммирующуюся с полезным сигналом и мультипликативную помеху µ(t)
U (t)= S(t)+ n(t), |
(1.1) |
где S(t) – переданный сигнал, n(t) – аддитивная помеха; мультипликативная помеха µ(t):
(1.2)
где µ(t) – некоторая случайная функция, отражающая изменение во времени коэффициента передачи канала связи.
В реальных системах связи часто действуют как аддитивная, так и мультипликативная помехи:
U (t)= µ(t)×S(t)+ n(t). |
(1.3) |
1.2.4. Эталонная модель взаимодействия открытых систем
Решение задачи передачи сообщений по системам электрической связи предъявляет к ним определенные требования. Эти требования условно можно разделить на две группы: требования к процессу передачи сообщений и требования к техническим средствам, осуществляющим этот процесс.
Вчисле требований к техническим средствам систем электрической связи выделяют следующие. Во-первых, система связи должна обладать способностью наращивания своих возможностей и исключения не использующихся возможностей. Системы, обладающие такой способностью, называют открытыми. Во-вторых, различные системы связи должны иметь стандартизованные и унифицированные технические устройства, что удешевляет их стоимость и эксплуатацию. В третьих, системы связи различного назначения должны обладать возможностью взаимного обмена сообщениями.
Эти требования породили необходимость единой идеологии проектирования систем связи. Международный консультативный комитет по телефонии и телеграфии в начале 80-х годов предложил такую идеологию, разработав эталонную модель взаимодействия открытых систем (ЭМВОС).
Всоответствии с этой моделью процесс передачи сообщений в системах связи последовательно разбивается на принципиально различающиеся операции. Каждую ив этих операций относят к своему уровню.
Уровни строятся по принципу строгой иерархии: на высшем уровне находятся источник и получатель информации - пользователи системы связи, на
нижнем - среда распространения электромагнитных волн. Высший уровень
22
управляет работой низшего. Каждому уровню соответствует свое техническое устройство или организационная единица системы связи пользователь или должностное лицо, обеспечивающее функционирование системы связи. В некоторых системах связи часть этих устройств может отсутствовать либо выполнять не все функции некоторого уровня.
В ЭМВОС выделяют 7 уровней: пользовательский, представительский, сеансовый, транспортный, сетевой, канальный, физический (рис. 1.4). Полную совокупность средств у одного пользователя, выполняющих операции различных уровней, называют станцией [18, 39].
На пользовательском уровне происходят процессы обработки информации, передаваемой системой связи. Исполнителем функций этого уровня может быть как техническое устройство (ЭВМ), так и человек.
Устройства представительского уровня преобразуют сообщения из формы представления, удобной пользователю, к форме представления, удобной системе связи, и обратно. В частности, на этом уровне происходит сжатие информации, поскольку системе связи всегда удобно, что бы сообщение занимало наименьший объем.
Устройства сеансового уровня обрамляют передаваемое сообщение служебной информацией с тем, чтобы количество топологических вариантов передачи было возможно большим. Выбор наилучшего варианта осуществляется устройствами нижних уровней. Таким образом, этот уровень отвечает за орга-
23
низацию сеанса связи.
На транспортном уровне принимается решение о перемещении данного сообщения к пользователю на уровне выбора необходимых сетей связи. Для этого решается задача межсетевой адресации сообщений и задача передами сообщений между сетями различного рода, называемая задачей шлюзования.
На сетевом уровне решается задача наилучшей доставки сообщения к пользователю в рамках, одной сети связи. Для этого выбирается маршрут движений сообщения подсети, решается задача внутрисетевой адресации пользователей.
Устройства канального уровня обеспечивают защиту передаваемых сообщений от искажений, которые возникают вследствие изменения параметров сигналов в процессе распространения.
Устройства физического уровня обеспечивают преобразование передаваемого сообщения, в сигналы и восстановление сообщения по принятому сигналу.
Правила, по которым взаимодействуют устройства соседних уровней одной станции, называют интерфейсом.
Правила, по которым взаимодействуют устройства одинаковых уровней у различных станций, называют протоколом.
1.2.5. Модели каналов связи и их математическое описание
Точное математическое описание любого реального канала связи обычно весьма сложное. Вместо этого используют упрощенные математические модели, которые позволяют выявить важнейшие закономерности реального канала.
Рассмотрим наиболее простые и широко используемые связи модели каналов.
Непрерывные каналы. Идеальный канал без помех вносит искажения, связанные с изменением амплитуды и временного положения сигнала и представляет собой линейную цепь с постоянной передаточной функцией, обычно сосредоточенной в ограниченной полосе частот. Допустимы любые входные сигналы, спектр которых лежит в определенной полосе частот ∆F , имеющие ограниченную среднюю мощность Pcp [6, 32]. Эта модель использу-
ется для описания каналов малой протяженности с закрытым распространением сигналов (кабель, провод, волновод, световод и т. д.).
Канал с гауссовским белым шумом представляет собой идеальный канал, в котором на сигнал S(t) накладывается помеха:
U (t)= µ S(t −τ )+ n(t). |
(1.4) |
24

Коэффициент передачи µ и запаздывание τ считаются постоянными и известными в точке приема; n(t) – аддитивная помеха. Такая модель, например, соответствует радиоканалам, с приемо-передающими антеннами работающими и находящимися в пределах прямой видимости.
Гауссовский канал с неопределенной фазой сигнала Эта модель отличается от предыдущей модели тем, что в ней запаздывание
является случайной величиной. Для узкополосных сигналов выражение (1.4) при постоянном µ и случайных τ можно представить в виде [6, 32]:
|
|
~ |
(t) sin Θ]+ n(t), |
(1.5) |
|
~ |
U (t)= µ [S(t) cos Θ− S |
||
где |
(t) – преобразование Гильберта от сигнала S(t); |
|
||
S |
|
|||
Θ = −ω0τ – случайная фаза.
Распределение вероятностей Θ предполагается заданным, чаще всего равномерным на интервале от 0 до 2π . Эта модель удовлетворительно описывает те же каналы, что и предыдущая, если фаза сигнала в них флуктуирует. Флуктуации фазы обычно вызываются небольшими изменениями протяженности канала, свойств среды, в которой проходит сигнал, а также фазовой нестабильностью опорных генераторов.
Дискретно-непрерывные каналы. Дискретно-непрерывный канал имеет дискретный вход и непрерывный выход. Примером такого канала является канал, образованный совокупностью технических средств между выходом кодера канала и входом демодулятора (см. рис. 1.3). Для его описания необходимо знать алфавит входных символов xi , i =1,2,...,m , вероятности появления символов алфавита p(xi ), полосу пропускания непрерывного канала FНК , входящего в рассматриваемый канал и плотности распределения вероятностей (ПРВ)
U (t) |
|
|
|
|
|
|
|
|
w |
x появления сигнала U (t) на выходе канала при условии, что переда- |
|||||||
|
i |
|
|
|
|
|
|
|
вался символ xi . |
|
|
|
|
|
|
|
|
Зная вероятности p(xi ) и ПРВ w U (t)x |
по формуле Байеса можно найти |
|||||||
|
|
|
|
|
|
i |
|
|
апостериорные вероятности передачи символа xi : |
||||||||
|
|
|
|
p(x ) w U (t) |
|
|
|
|
|
x |
|
|
i |
|
x |
|
|
|
|
|
|
i |
|
, |
||
|
p i |
U (t) |
= |
|
|
|||
|
m |
U (t) |
||||||
|
|
|
|
∑p(xi |
) w |
xi |
|
|
|
|
|
|
i=1 |
|
|
||
Решение о переданном символе xi обычно принимается из условия максимума
p (xi )U(t) .
25
Дискретные каналы. Примером дискретного канала без памяти может служить m-ичный канал. Канал передачи полностью описывается если заданы [20, 21] алфавит источника xi , i =1,2,...,m , вероятности появления символов
алфавита |
p(xi ), скорость передачи символов VИ , алфавит получателя y j , |
||||
j =1,2,..., n |
и значения переходных вероятностей |
y |
j |
|
появления символа |
p |
x |
||||
|
|
|
|
i |
|
y j при условии передачи символа xi .
Первые две характеристики определяются свойствами источника сообщений, скорость VИ – полосой пропускания непрерывного канала, входящего в состав дискретного. Объем алфавита выходных символов зависит от алго-
ритма работы решающей схемы; переходные вероятности p y j xi находятся
на основе анализа характеристик непрерывного канала.
Стационарным называется дискретный канал, в котором переходные ве-
роятности p y j xi не зависят от времени.
Дискретный канал называется каналом без памяти, если переходные ве-
роятности |
y |
j |
|
|
|
|
|
p |
x не зависят от того, какие символы передавались и принима- |
||||||
|
|
|
i |
|
|
|
|
лись ранее. |
|
|
|
|
|
|
|
0 |
q = 1 − pош |
0 |
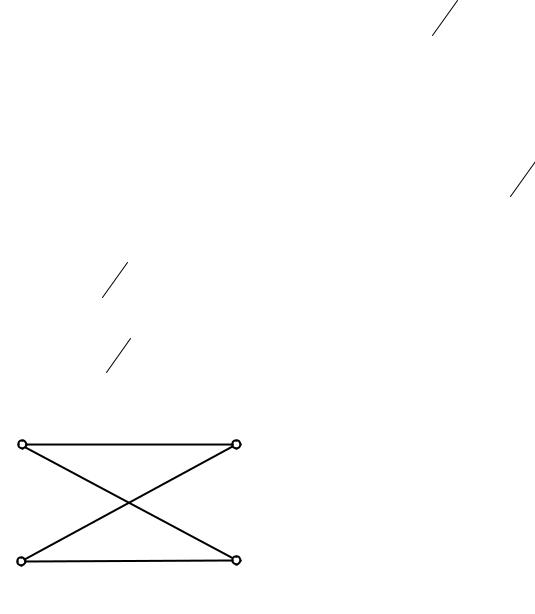
В качестве примера рассмотрим дво- |
||||
ичный канал |
(рис. 1.5). В этом случае |
||||||
|
|
|
|||||
|
pош |
|
|
m = n = 2 , т.е. |
на входе канала алфавит ис- |
||
|
|
|
|
|
точника и алфавит получателя состоит из |
||
|
pош |
|
|
двух символов «0» и «1». |
|||
1 |
|
|
|
1 |
Стационарный двоичный канал назы- |
||
q = 1 − pош |
вается симметричным, если алфавиты на |
||||||
входе и выходе совпадают. Каждый пере-
 данный кодовый символ может быть принят ошибочно с фиксированной вероятностью pош и правильно с вероятностью
данный кодовый символ может быть принят ошибочно с фиксированной вероятностью pош и правильно с вероятностью
q =1− pош .
Необходимо отметить, что в общем случае в дискретном канале объемы алфавитов входных и выходных символов могут не совпадать. Примером может быть канал со стиранием (рис. 1.6). Алфавит на его выходе содержит один добавочный символ по сравнению с алфавитом на входе. Этот добавочный символ (символ стирания «? ») появляется на выходе канала тогда, когда анализируемый сигнал не удается отождествить ни с одним из передаваемых
26

символов. Стирание символов при применении соответствующего помехоустойчивого кода позволяет повысить помехоустойчивость.
Большинство реальных каналов имеют «память», которая проявляется в
том, что вероятность ошибки в очеред- |
0 |
q = 1 − (pc + pош ) |
0 |
|
ном символе зависит от того, какие |
p |
|||
символы передавались до него и как они |
|
ош |
|
|
|
|
|
||
были приняты. Первый факт обусловлен |
|
p |
? |
|
межсимвольными искажениями, являю- |
|
pc |
||
щимися результатом рассеяния сигнала |
|
c |
|
|
1 |
pош |
1 |
||
в канале, а второй – изменением отно- |
||||
шения сигнал-шум в канале или харак- |
|
q = 1 − (pc + pош ) |
|
|
|
|
|
тера помех. В постоянном симметричном ка-
нале без памяти условная вероятность
ошибочного приема ( i +1 )-го, символа если i -й символ принят ошибочно, равна безусловной вероятности ошибки. В канале с памятью она может быть больше или меньше этой величины.
Наиболее простой моделью двоичного канала с памятью является марковская модель, которая задается матрицей переходных вероятностей:
1 |
− p |
p |
|
, |
p = |
1 |
1 |
|
|
p2 |
1− p2 |
|
||
где p1 – условная вероятность принять (i +1)-й символ ошибочно, если i -й принят правильно; 1− p1 – условная вероятность принять (i +1)-й символ правильно, если i -й принят правильно; p2 – условная вероятность принять (i +1)-й символ ошибочно, если i -й принят ошибочно; 1− p2 – условная вероятность принять (i +1)-й символ правильно, если i -й принят ошибочно.
Безусловная (средняя) вероятность ошибки в рассматриваемом канале должна удовлетворять уравнению:
x |
i+1 x |
|
= p2 |
pош (xi |
)+ p1 pправ (xi ) или |
|||
p |
|
|||||||
|
i |
|
|
|
|
|
|
|
|
x |
|
|
|
|
p1 |
|
. |
|
p |
i+1 |
x = |
1 |
+ p + p |
|||
|
|
|
i |
|
2 |
|||
|
|
|
|
|
|
1 |
|
|
Данная модель имеет достоинство – |
простоту использования, не всегда |
|||||||
адекватно воспроизводит свойства реальных каналов. Большую точность позволяет получить модель Гильберта для дискретного канала с памятью. В такой модели канал может находиться в двух состояниях S1 и S2 . В состоянии S1 ошибок не происходит; в состоянии S2 ошибки возникают независимо с вероятностью p2 .
27
Также считаются известными вероятности перехода p S1 |
|
из состояния S1 в S2 |
|||
|
|
|
|
S2 |
|
и вероятности перехода p S2 |
S |
|
из состояния S2 в состояние S1 . В этом случае |
||
|
1 |
|
|
|
|
простую марковскую цепь образует не последовательность ошибок, а последовательность переходов:
|
|
|
|
|
|
|
− |
S |
2 |
|
|
S |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
p |
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
p = |
|
S |
|
|
|
|
|
S |
|
. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
p |
1 |
|
|
|
|
1− p |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При этом достаточно легко выразить безусловные вероятности нахождения |
|||||||||||||||||||||||||||||||
канала в состояниях S1 и S2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
S |
|
|
|
|
|
|
||||
|
|
p |
1 S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
2 |
|
|
|
|
|
|
||||
p(S1 )= |
|
|
|
|
2 |
|
|
|
|
, |
|
|
p(S2 )= |
|
|
|
|
|
1 |
|
|
|
|
|
. |
||||||
S |
S |
|
|
|
S |
|
S |
|
|
|
S |
|
S |
|
|
|
S |
S |
|
|
|||||||||||
|
p 1 |
2 |
|
+ p |
|
2 |
|
|
|
|
|
|
|
|
p |
2 |
|
+ p |
1 |
2 |
|
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||
Безусловная вероятность ошибки в этом случае может быть определена по формуле:
|
|
|
|
|
|
S |
2 S |
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
||
|
|
p = p2 p(S2 )= p2 |
|
|
|
1 |
|
|
|
|
. |
||
|
|
S |
|
S |
|
S |
S |
|
|
||||
|
|
|
|
p |
2 |
+ p 1 |
2 |
|
|||||
|
|
|
|
|
|
1 |
|
|
|
|
|||
Наиболее часто при использовании модели Гильберта для двоичного кана- |
|||||||||||||
ла полагают p2 |
= |
1 |
, т.е. состояние S2 |
|
рассматривается как полный обрыв связи. |
||||||||
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Это согласуется с представлением о канале, в котором действуют коммутационные помехи.
Возможен другой подход к построению математических моделей каналов, при котором вся предыстория до некоторого фиксированного момента времени t0 заменяется заданием некоторого начального состояния цепи. Зная характеристики цепи, начальное состояние и сигнал, действующий только на промежутке от t0 до t1 , можно определить сигнал на выходе и новое состояние цепи в любой момент времени t >t0 .
Состоянием цепи называется минимальное множество величин, в которое входит n элементов, однозначно определяющих поведение цепи в момент времени t . Элементы этого множества называют переменными состояния, которые обычно рассматривают как составляющие компоненты n -мерного вектора. Для любой цепи можно записать два уравнения, позволяющих по состоянию в момент t0 и сигналу, поступающему на вход, найти выходной сигнал и состояние в мо-
28
мент t >t0 . Эти матричные уравнения называют уравнением состояния и уравне- |
||||||||
нием наблюдения. |
|
|
|
|
|
|
|
|
1.3. Способы описания сигналов и помех |
|
|
||||||
1.3.1. Сигнал и его математическая модель |
|
|
||||||
Сигналы можно классифицировать по форме, информативности и харак- |
||||||||
теристикам. |
|
|
|
|
|
|
|
|
Из простых по форме сигналов в электросвязи наибольшее применение |
||||||||
находят гармонические и импульсные сигналы. |
|
|
|
|||||
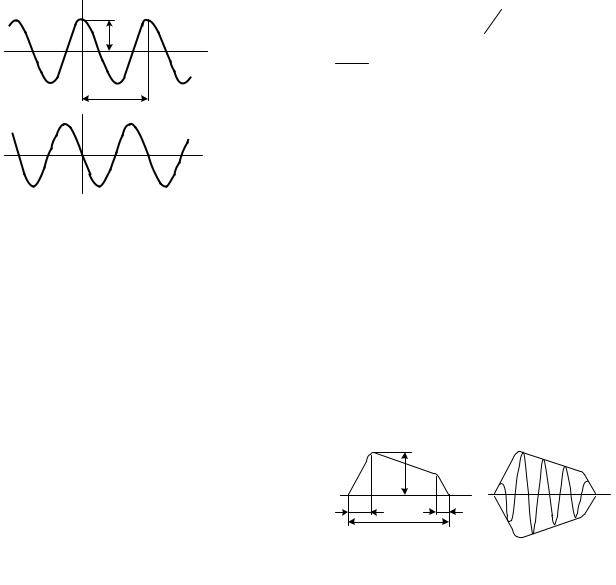
Гармонический сигнал (рис. 1.7), записывается в виде: |
|
|||||||
|
S(t)= A0 cos(ωt +ϕ0 ), |
|
|
(1.6) |
||||
S(t ) |
где |
A0 |
– |
максимальное |
значение (амплитуда); |
|||
ω = 2πf |
– угловая частота; |
f = 1 |
– циклическая |
|||||
|
||||||||
A0 |
|
|
|
|
|
T |
|
|
частота; ϕ0 |
= 2πτи – начальная фаза. |
|||||||
|
||||||||
|
|
|
|
T |
|
|
|
|
S(t ) |
|
Для представленных на рис. 1.7. гармони- |
||||||
ческих сигналов значения начальной фазы при- |
||||||||
|
||||||||
|
нимают значения: ϕ0 |
= 0 (рис. 1.7, а); ϕ0 = 900 (рис. |
||||||
|
1.7, б). |
|
|
|
|
|
||
|
|
Импульсными являются сигналы, отличные |
||||||
|
от нуля в течение ограниченного времени. Эти |
|||||||
|
сигналы существуют лишь в пределах конечного |
|||||||
отрезка ( t1 , t2 ). При этом различают видеоимпульсы (рис. 1.8, а) и радиоим- |
||||||||
пульсы (рис. 1.8, б). Если sB (t) - видеоимпульс, то соответствующий ему радио- |
||||||||
импульс описывается выражением: |
SP (t)= sB (t)cos(ωt +ϕ0 ) |
(частота ω0 и началь- |
||||||
ная фаза ϕ0 могут быть произвольными). В радиоимпульсе sB (t) называется |
||||||||
огибающей, а функция cos(ωt +ϕ0 ) |
– заполнением. Параметрами видеоимпульса |
|||||||
принято считать его амплитуду A0 , дли- |
sB (t) |
|
S P (t) |
|
||||
тельность τи , длительность фронта |
tф , |
|
|
|||||
|
A0 |
|
|
|||||
длительность спада |
tc . Происхождение |
|
|
|
||||
|
|
|
|
|||||
термина «видеоимпульс» связано с тем, |
τ |
и |
|
|
||||
|
|
|
|
|||||
что впервые такие импульсы начали |
|
|
|
|
||||
применять для описания сигналов в те- |
|
|
|
|
||||
левидении. |
|
|
|
|
|
|
|
|
В электросвязи наибольшее применение находят одиночные импульсы |
||||||||
|
|
|
29 |
|
|
|
|
|
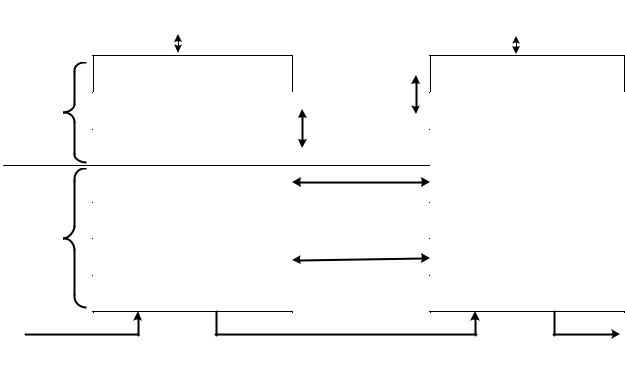
или периодические последовательности импульсов, форма которых приближается к прямоугольной. Для периодической последовательности импульсов, вводится понятие скважности, определяемой как отношение периода к длительности импульса:  .
.
По информативности сигналы классифицируются на детерминированные и случайные.
Детерминированным называется сигнал, изменение которого во времени полностью предопределено заранее. Математическим описанием такого сигнала служит детерминированная функция времени S(t). Это означает, что любому моменту времени ti соответствует определенное значение функции S(ti ). Детерминированные сигналы подразделяются на периодические и непериодические. Для периодического сигнала существует такой интервал времени Т (пери-
од), что k = 0, ±1, ± 2, ...
Случайным (или нерегулярным) сигналом называется сигнал, изменение которого во времени точно предсказать невозможно. Математическое описание подобных сигналов осуществляется с помощью случайных функций. Для случайной функции ее значение при фиксированном аргументе ti – случайная величина.
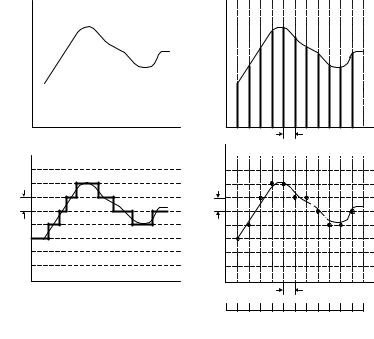
U(t) |
U (t) |
U(t) |
U(t) |
∆U |
∆U |
|
|
Сигналы, связанные с пе- |
||||
|
редачей сообщений и воздейст- |
|||||
|
вием помех в системах связи, |
|||||
|
относятся к разряду случайных |
|||||
|
сигналов. |
Такими |
|
случайными |
||
∆t |
сигналами являются, например, |
|||||
напряжения или токи, соответ- |
||||||
|
||||||
|
ствующие речи, музыке, после- |
|||||
|
довательности |
телеграфных |
||||
|
знаков и т.п. |
|
|
|||
|
|
По характеристикам в за- |
||||
∆t |
висимости |
от области опреде- |
||||
ления |
и |
области |
|
возможных |
||
|
|
|||||
|
значений |
функции |
различают |
|||
следующие виды сигналов (рис. 1.9).
Сигналы первого вида (рис. 1.9, а), называемые непрерывными, задаются на конечном или бесконечном временном интервале и могут принимать любые значения в некотором диапазоне. Примером является сигнал на выходе микро-
30