

Корольов / Теория связи
.pdfпогрешности оценивания вероятностей PF и PD зависят лишь от величин PD или
PF и числа N экспериментов, т.е., в принципе, могут быть сделаны сколь угод-
но малыми при достаточно больших объемах вычислений на ЭВМ. Действительно, рассмотрим оценку PD , в качестве которой используется
частота PD* = k N , где k – число превышений суммой z порогового уровня z0 в
N , где k – число превышений суммой z порогового уровня z0 в
серии из N опытов. Поскольку k подчиняется биномиальному закону распределения (1.7) с параметром p = PD , то дисперсия ошибки оценивания вероятно-
сти правильного обнаружения определяется следующим образом:
2 |
|
|
2 |
|
|
1 |
2 |
|
|
k − NP |
|
|
|
|
|||||
M {(PD* − PD ) |
}= M |
D |
|
= |
|
|
M {(k − NPD ) |
}= PD (1 − PD ) N . |
|
N |
2 |
||||||||
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналогично и M {(PF* − PF )2 }= PF (1 − PF ) N . Итак, задавая погрешности оцени-
N . Итак, задавая погрешности оцени-
вания PD или PF , можно с помощью этих формул определить необходимое чис-
ло N повторений эксперимента.
Метод статистического моделирования во многих случаях требует проведения очень большого числа экспериментов и, следовательно, значительного машинного времени. Например, при PF =10−4 , M {(PF* − PF )2 }PF = 0,01 получаем
N =108 , иобщее количество 108 n формируемых на ЭВМ псевдослучайных чисел, а также операций по вычислению li (yi(j )) весьма велико. Для современных ЭВМ решение задач статистического моделирования часто требует десятков или сотен часов непрерывной работы. Поэтому анализ помехоустойчивости радиосистем требует в сложных случаях искусного сочетания аналитических методов и экспериментов на ЭВМ.
3.2. Оптимальная демодуляция при когерентном приеме сигналов
3.2.1. Оптимальные алгоритмы приема при полностью известных сигналах
Методы приема, для реализации которых необходимо точное знание на-
121
чальных фаз приходящих сигналов, называют когерентными.
Предположим что анализируемый сигнал ограничен во времени интервалом [0,T ] и передается в условиях воздействия гауссовского аддитивного белого шума n(t), со спектральной плотностью N0 . Это значит, что при передаче сим-
вола xk принимаемое напряжение имеет вид:
U (t)= Sk (t)+ n(t), |
0 ≤ t ≤ T . |
(3.31) |
||||||
Определим в этих условиях алгоритм работы оптимального демодулято- |
||||||||
ра, основанного на правиле максимального правдоподобия: |
|
|||||||
Λk (UG)> Λr (UG), |
|
r =1,2,...m , r ≠ k |
(3.32) |
|||||
Рассмотрим вначале левую часть неравенства, где определим знамена- |
||||||||
тель, а затем числитель функции, где |
|
|
||||||
|
|
G |
|
|
|
|
||
Λk (UG)= |
w U |
|
|
|
|
|||
|
G xk |
, |
k =1,2,...m . |
(3.33) |
||||
|
||||||||
|
|
|
|
|
|
|||
|
w U |
|
|
|
|
|||
|
|
|
x0 |
|
|
|||
Многомерная ПРВ при независимых наблюдениях равна произведению одномерных ПРВ [5, 32, 39]:
|
G |
|
|
2FT |
U |
|
|
|
|
2FT |
|
1 |
|
|
− U i2 |
||
|
|
|
|
x |
= ∏ |
|
e |
|
2σ 2 |
|
|||||||
w U x |
|
= ∏w |
i |
|
σ |
2π |
|
|
|
||||||||
|
|
0 |
|
i =1 |
|
|
|
0 |
|
i =1 |
|
|
|
|
|
||
|
|
Поскольку: |
2FT |
|
T |
|
(t)dt , |
||||||||||
|
|
|
∑Ui2 = 2F ∫U 2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
i=1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
2 FT |
|
|
|
1 |
|
− |
|
∑U i2 |
|
|
= |
|
e |
2σ |
2 |
. |
|||
|
|
|
i=1 |
|||||
(σ 2π )2FT |
|
|
|
|
||||
|
σ 2 |
F = N0 , то |
|
|
|
|||
|
G |
|
|
|
|
1 |
T |
(t )dt |
|
|
|
1 |
− |
∫U 2 |
|||
|
N0 |
|||||||
|
|
|
0 |
|
||||
w U |
|
= |
(σ 2π )2FT |
e |
|
|
. |
|
|
|
x0 |
|
|
|
|
|
|
Многомерная ПРВ в числителе (3.33) определяется аналогично:
|
G |
|
|
|
|
1 |
T |
|
|
|
|
1 |
− |
∫[U (t )−Sk (t )]2 dt |
|
||
|
N0 |
|
||||||
|
|
|
0 |
|
||||
w U |
|
= |
(σ 2π )2FT |
e |
|
|
. |
|
|
|
xk |
|
|
|
|
|
|
Подставляя (3.35) и (3.36) в (3.33), находим:
|
|
UG |
|
|
|
|
1 |
T |
2 |
|
1 |
T |
2 |
|
|
|
G |
w |
|
x |
|
|
− |
|
∫[U (t )−Sk (t )] dt |
|
|
∫U |
|
(t )dt |
|
Λk |
(U )= |
|
G |
|
k |
|
= e |
0 |
0 |
|
e |
0 |
0 |
|
, |
|
|
|
|
|
|
|
|
||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
w U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0 |
|
|
|
|
|
|
|
|
|
||
(3.34)
(3.35)
(3.36)
(3.37)
122
Учитывая, что энергия k -го сигнала на выходе канала:
T
E(Sk (t))= Ek = ∫Sk2 (t)dt ,
0
получим следующее выражение:
|
|
2 |
T |
|
(UG)= e |
∫0 U (t )Sk (t )dt |
|
Λk |
N0 |
||
|
0 |
|
|
Ek |
(3.38) |
e−N0 . |
Правило принятия решения (3.32) можно записать в логарифмической
форме: |
|
|
|
|
ln Λk |
0 |
(U )> ln Λr |
(U ). |
(3.39) |
|
|
0 |
|
Подставив (3.37) в (3.39) и умножив обе части неравенства на N0 , полу-
чим:
T∫[U (t)− Sk (t)]2 dt < T∫[U (t)− Sr (t)]2 dt , |
(3.40) |
|
0 |
0 |
|
Проделав аналогичные операции с (3.38) и (3.39), и учитывая Pk = Ek T , полу-
чим:
1 |
T |
P |
|
1 |
T |
|
P |
|
|
|
∫0 U (t)Sk (t)dt − |
k |
> |
|
∫0 |
U (t)Sr (t)dt − |
r |
. |
(3.41) |
T |
T |
T |
T |
||||||
Полученные неравенства представляют собой оптимальное правило принятия решения, согласно которому следует принять решение о передаче символа xk (сигнала Sk (t)), если неравенство выполняется для всех k ≠ r .
3.2.2. Реализация алгоритмов оптимального когерентного приема
Реализация полученных алгоритмов оптимального когерентного приема может быть представлена в виде функциональных схем, состоящих из m ветвей обработки входного напряжения U (t) в соответствии с правилами (3.40) и (3.41)
и устройств сравнения, определяющих номер k -ой ветви в момент t =T . Функциональные узлы могут быть реализованы на аналоговой или циф-
ровой элементной базе.
123
Генераторы опорных сигналов должны формировать сигналы, совпадающие с соответствующими реализациями сигналов, поступающих на вход демодулятора из линии связи.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выполнение неравенства (3.40) означа- |
|
|
|
|
|
|
|
|
|
|
T |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫0 |
|
|
|
|
|
ет, что принимаемое напряжение «ближе» |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
S1 (t ) |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
U (t ) |
|
|
|
|
|
|
|
|
|
|
|
xi (t ) |
всего к образцу сигнала Sk (t). Функцио- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T ] |
|
|
|
t [0,T ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t [T ,2 |
нальная схема оптимальной обработки в |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соответствии с правилом (3.40) называется |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫T |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схемой с квадраторами (рис.3.4). В момент |
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Sm |
(t ) |
|
|
|
окончания обработки t =T |
производится |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сравнение выходов m ветвей интегриро- |
|
вания квадратов разностей |
входного сигнала U (t) и образцов |
сигнала Sk (t), |
|||||||||||||||||||
k =1,2,...m и делается выбор номера k-й ветви по минимуму напряжения. Таким образом принимается решение о том, что передавался k-й сигнал и в момент времени t =T формируется соответствующее сообщение
Функциональная схема оптимальной обработки в соответствии с правилом (3.41) объединяющая генератор опор-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ного сигнала Si (t), перемножитель и инте- |
|
|
|
|
|
|
|
|
∫T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гратор называется схемой на коррелято- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
U (t ) |
|
|
S1 (t ) |
|
|
|
|
2 |
|
|
|
|
|
xi (t) |
|
рах (рис. 3.5). |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
t [0,T ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t [T ,2T ] |
При корреляционном способе ис- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пользуются образцы сообщения, храня- |
|
|
|
|
|
|
|
|
∫0T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
щиеся в памяти приемного устройства. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pm |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Sm (t ) |
|
|
2 |
|
|
|
|
|
|
В соответствии с правилом (3.41) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
входное напряжение U (t) в пределах ин- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тервала наблюдения [0,T ] перемножается |
со всеми эталонными реализациями Si (t) и результат интегрируется на проме-
жутке [0,T ]. В момент t =T из значений интегралов вычитаются слагаемые и выбирается наибольший результат.
124
Наиболее трудно выполнимым требованием в рассмотренных алгоритмах приема сигналов является обеспечение точного фазирования опорных напряжений Si (t) и точного совпадения формы. В то же время есть возможность по-
строения оптимального демодулятора с помощью замены коррелятора линейным фильтром с теми же свойствами. Напряжение на выходе любого линейного фильтра в момент времени t =T определяется интегралом Дюамеля [5, 39]:
Uвых (T ) = T∫U (t) g(T −t)dt , |
(3.42) |
||||
0 |
|
|
|
||
где g(t) – импульсная переходная характеристика фильтра. |
|
||||
Напряжение на выходе коррелятора |
|
||||
|
1 |
T |
U (t) Si (t)dt . |
|
|
Zi (T ) = |
∫0 |
(3.43) |
|||
T |
|||||
Сравнение (3.42) и (3.43) показывает, что напряжения Zi (t) |
и Uвых (T ) сов- |
||||
падают, если импульсная реакция фильтра удовлетворяет условию:
gi (t)= |
1 |
Si (T −t) . |
(3.44) |
|
Т |
||||
|
|
|
Линейный фильтр обладающий импульсной реакцией вида (3.44), называется фильтром согласованным с сигналом Si (t).
Таким образом, функциональная схема оптимальной обработки на корре-
ляторах (рис. 3.5) заменяется схемой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на согласованных фильтрах (рис. 3.6). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В отличие от схемы на корреля- |
U (t ) |
|
|
|
|
|
|
|
|
E1 |
|
|
|
xi |
(t ) |
|
||||
|
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
|
|
|
|
|||||||||||||||
торах, в схеме на СФ не нужны гене- |
t [0,T ] |
|
|
|
|
|
t [T ,2T ] |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
раторы опорных напряжений Si (t), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
точно сфазированные |
с приходящим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Em |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
сигналом. Однако в |
схеме на СФ |
|
|
2 |
|
|
|
|
|
|
|
|
||||||||
должна обеспечена высокая точность выбора момента отсчета t =T , что соз-
дает трудности для практической реализации.
Из-за неравномерности АЧХ и нелинейности ФЧХ форма напряжения на
125
выходе СФ значительно отличается от формы входного сигнала. Однако при приеме дискретных сигналов возможная их форма заранее известна и требуется определить лишь номер переданной реализации.
3.3. Помехоустойчивость приема сигналов с известными параметрами
Помехоустойчивость дискретного канала связи определяется вероятностью ошибочного приема pош сигналов. Рассмотрим определение pош для дво-
ичного канала связи m=2, по которому передается один из двух сигналов или S2 (t). Перепишем правило принятия решения в виде:
Если |
2T∫U (t) [S1 (t)− S2 (t)]dt −[E1 − E2 ]> 0 , |
(3.45) |
|
0 |
|
то принимается решение в пользу S1 (t). |
|
|
Пусть на вход |
схемы оптимальной обработки |
поступает сигнал |
U (t)= S1 (t)+ n(t). В этом случае правильное решение принимается, если неравен-
ство выполняется, и ошибочное, если
2T∫S1 (t) [S1 (t)− S2 (t)]dt + 2T∫n(t) [S1 (t)− S2 (t)]dt − E1 + E2 < 0 . |
(3.46) |
|
0 |
0 |
|
Раскроем скобки первого интеграла, и представим энергию первого и второго сигналов, а также взаимную корреляционную функцию соответственно следующим образом:
E1 = T∫S12 (t)dt , E2 = T∫S22 (t)dt , |
E12 = T∫S1(t) S2 (t)dt . |
|
|
0 |
0 |
0 |
|
неравенство (3.46) принимает вид |
|
|
|
|
E0 +2T∫n(t) [S1(t)− S2 (t)]dt < 0 , |
(3.47) |
|
|
0 |
|
|
где E0 = E1 + E2 −2E12 |
суммарная (эквивалентная) энергия двух сигналов. |
|
|
Последнее слагаемое в правой части неравенства (3.47) гауссовская случайная величина с нулевым математическим ожиданием (средним) и дисперси-
126
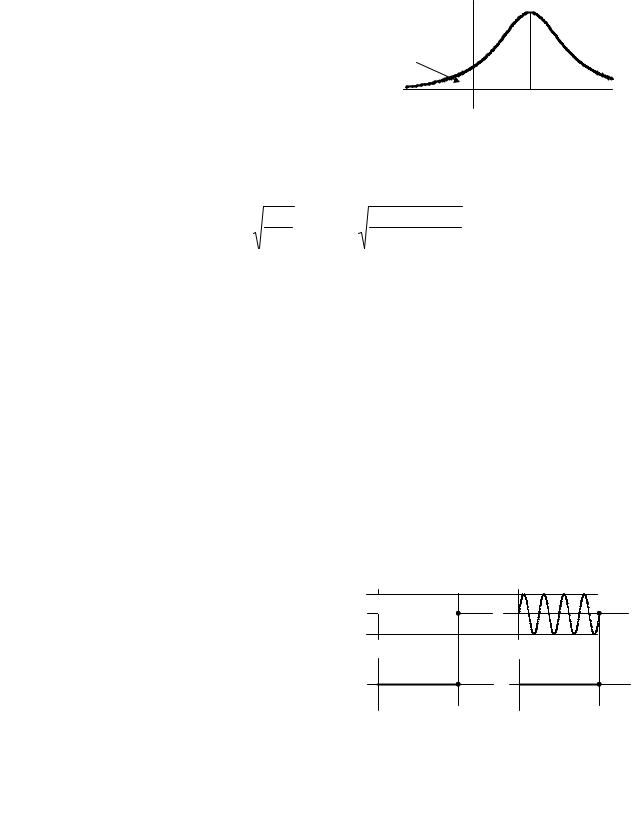
ей σ2 = 2N0 таким образом η = E0 +2T∫n(t) [S1(t)−S2 (t)]dt < 0 |
будет иметь гауссов- |
||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
ское распределение со средним Е0 |
и дисперсией σ2 (рис. 3.7). |
|
|
||||||||||
Вероятность ошибок (рис. |
3.7) |
для рас- |
|
|
w(η) |
|
|
||||||
сматриваемого двоичного канала связи, опре- |
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||
деляется площадью, ограниченной ПРВ w(η) и |
p(η≤ 0) |
|
|
|
|||||||||
осью абсцисс для всех η ≤ 0 . |
|
|
|
|
|
|
|
|
|
0 |
η0 |
η |
|
Формула, |
характеризующая вероятность |
|
|
|
|||||||||
|
|
|
|
|
|
||||||||
ошибочного приема S1 (t) (т.е. принятия реше- |
|
|
|
|
|
|
|||||||
ния о передаче S2 (t), когда передавался S1 (t)), будет следующей: |
|
|
|||||||||||
|
−0,5E0 |
|
E |
|
|
E |
+ E |
|
− 2E |
|
|
|
|
|
|
2 |
|
|
|||||||||
pош = |
|
|
|
0 |
|
|
1 |
|
12 |
|
|
(3.48) |
|
∫w(η)dη =1 − F |
2N0 |
|
=1 − F |
|
2N0 |
. |
|
||||||
|
−∞ |
|
|
|
|
|
|
|
|||||
Из (3.48) следует, что вероятность ошибочного приема элементов двоич- |
||
ного сообщения тем меньше, чем больше эквивалентная энергия E0 и чем |
||
меньше спектральная плотность мощности помех N0 . |
|
|
Оценим влияние структуры передаваемых сигналов на вероятность их |
||
ошибочного приема. Если сигналы близки по форме S1 (t)≈ S2 (t),то E1 = E2 = E12 , |
||
E0 = 0 , и вероятность ошибки максимальна |
pош = 0,5 . |
Такие сигналы разделить |
невозможно, надо использовать сигналы S1 (t) и S2 (t) значительно отличающих- |
||
ся друг от друга. Рассмотрим несколько видов сигналов, применяющихся в сис- |
||
темах связи. Поэтому применение сигна- |
|
|
лов, близких по форме, нецелесообразно. |
s1 (t ) |
S1 (t ) |
Наиболее простым является сигнал с пас- |
|
|
сивной паузой амплитудно - модулирован- |
s2 (t ) |
S2 (t ) |
ный: S1 (t)= S(t), S2 (t)= 0 (рис. 3.8). |
|
|
Тогда энергия первого сигнала равна E : |
|
|
E1 = E , а энергия второго и взаимная энер- |
|
|
гия сигналов равны нулю: E2 = E12 = 0 , тогда E0 = E . |
|
|
Вероятность ошибки определяется выражением: |
|
|
127
|
|
|
|
p |
|
= 0.5 − |
Ф |
|
E |
|
|
|
|
|
|
|
|
|
|
ош |
|
|
. |
|
|
|
|
(3.49) |
|||
|
|
|
|
|
|
0 |
|
2N0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s (t ) |
S |
1 |
(t ) |
|
|
|
|
|
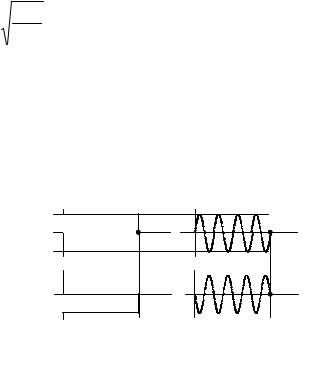
Определим |
pош |
для |
ортогональных |
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигналов |
S1 (t) |
и |
S2 (t) |
(рис. 3.9). Пусть |
||||
s2 (t ) |
S2 (t ) |
|
|
|
E1 = E2 = E . Согласно условию ортогонально- |
||||||||||
|
|
|
|
|
|
|
сти |
E12 = 0 , тогда |
E0 = 2E . При этом вероят- |
||||||
|
|
|
|
|
|
|
ность ошибки: |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.50) |
|
|
|
|
pош = 0.5 −Ф0 |
N0 |
. |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
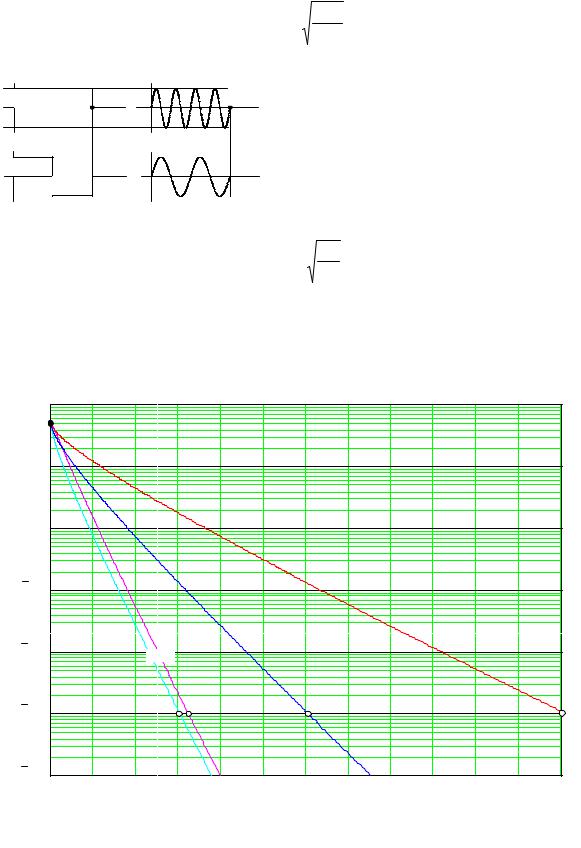
На рис. 3.10 представлены кривые зависимости вероятности ошибок от |
||||||||||||||
отношения сигнал/шум для сигналов: АМн, ЧМн, ФМн, ОФМн. |
|
||||||||||||||
|
Для противоположных сигналов: S1 (t)= S(t), а S2 (t)= −S(t) (рис. 3.11) |
||||||||||||||
|
Тогда E1 = E2 |
= E , |
E12 |
= −E , E0 |
= 4E . |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
128 |
|
|
|
|
|
|
Вероятность ошибки определяется выражением [21, 32, 39]:
p |
|
= 0.5 |
−Ф |
|
2E |
|
|
ош |
|
|
. |
(3.51) |
|||
|
|
0 |
|
2N0 |
|
||
|
|
|
|
|
|
|
В этом случае расчет вероятности ошибки для ОФМн сигналов производится по формуле:
pОФМнКГ := 2 pФМнКГ (1− pФМнКГ ). |
(3.52) |
|
Сравнение различных по форме |
|
|
сигналов (рис. 3.9 – 3.11) показывает, |
s1 (t ) |
S1 (t ) |
что помехоустойчивость противофаз- |
|
|
ных сигналов может быть получена |
s2 (t ) |
S2 (t ) |
при затратах энергии в 2 раза мень- |
|
|
шей, чем при ортогональных сигналах |
|
|
и в 4 раза меньшей, чем при передаче |
|
|
сообщений сигналами с пассивной паузой. |
|
|
3.4. Прием сигналов с неопределенной фазой
Когерентный прием дискретных сигналов основан на точном знании фазы возможных реализаций переданного сигнала на входе демодулятора. Однако при передаче сигналов по каналам радиосвязи фаза принимаемого сигнала обычно является случайной величиной, принимающей значения в пределах от 0 до 2π .
3.4.1. Оптимальный некогерентный приемдискретных сигналов
Способ когерентной обработки сигналов относится к идеализированным условиям, когда неизвестно, какая из заданных реализаций была передана. Форма реализаций, момент прихода и мощность достоверно известны.
Изменение параметров канала связи (µ, τ), изменение режима передаю-
щего устройства и ряд других факторов приводят к тому, что некоторые параметры реализаций сигнала делаются случайными и могут быть оценены с неко-
129
торой погрешностью. Такая ситуация особенно характерна для радиоканалов. Получение алгоритмов оптимальной обработки сигналов со случайными параметрами — проблема значительно более сложная. При ее решении пользуются двумя приемами.
Первый прием характерен для ситуации, когда некоторый случайный параметр γ меняется медленно и за время действия одной реализации его можно считать неизменным. Тогда правило обработки, и схема приемника сохраняются, а параметр для каждого следующего решения экстраполируется по множеству его предыдущих значений. Обычно это удается выполнить с помощью введения автоматических регулировок. Так, например, при неизвестной амплитуде сигнала вводится автоматическая регулировка порогового уровня.
Второй прием применяется в условиях, если параметр γ меняется быстро и за время действия реализации Т он может значительно изменяться. Для получения правила оптимальной обработки в этих условиях составляют функцию правдоподобия Λ1,2 (γ ), как это делалось ранее. Поскольку функция правдоподо-
бия оказывается зависящей от параметра W (γ ), ее усредняют. Для усреднения необходимо знать плотность распределения вероятностей случайного параметра γ . Тогда правило оптимальной обработки принимает вид
∞∫W (γ )Λ1,2 (γ )d ≥C0 ,
−∞
где величина порога C0 зависит от выбранного критерия.
Оптимальный прием сигнала в условиях, когда начальная фаза сигнала является величиной случайной, называют оптимальным некогерентным приемом.
Обычно предполагают, что в пределах периода начальная фаза имеет равновероятное распределение, так что плотность распределения постоянна и равна
W (ϕ)= |
1 |
(ϕ [0,2π]). |
|
2π |
|||
|
|
130