12.Consider the two-fingered grasp shown in Figure 5.17. Equate the locations of the fingertips with the contact locations on the box. Di erentiate this algebraic constraint and show that it is equivalent to the answer given in the example at the end of Section 5.
13.Give an example of two surfaces in contact which has singular relative curvature form.
14.Calculate the geometric parameters for an ellipsoid, a parabaloid, and a torus.
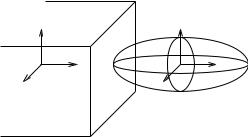
15.The figure below shows an elliptic fingertip in contact with a flat object. The principal axes of the ellipse have length a, b, and c, respectively.
(a)Give an orthonormal coordinate chart for the fingertip around the point of contact as shown in the figure.
(b)Assume the fingertip is in rolling contact with the object. Derive the equations of contact.
(c)Compute the velocity of the fingertip relative to the object which satisfies rolling constraint and produces a contact velocity of α˙ o = (0, v), v R.
16.Derive the equations of contact for a unit sphere in rolling contact with a sphere of radius ρ.
17.Kinematics of planar contact
The kinematics of contact for two planar objects can be obtained by
restricting equation (5.28) to the plane. Let gof = (p, R) SE(2) be the relative configuration of the objects.
(a) Let so R be the point of contact on the object and sf R be the point of contact on the finger. Assume that the surface is
parameterized by arc length, so that k∂ci k = 1 where ci : R →
∂si
R2 is a coordinate chart. Show that the contact coordinates


 O
O