


Геометрически это означает нахождение такой точки на оси абсцисс, что перпендикуляр, восстановленный в этой точке, делит площадь под кривой функции принадлежности на две равные части.
Метод центра максимумов. Дефаззификация нечёткого множества  осуществляется по формуле
осуществляется по формуле
где  – множество всех элементов из интервала[
– множество всех элементов из интервала[
 ], имеющих максимальную степень принадлежности нечёткому множеству
], имеющих максимальную степень принадлежности нечёткому множеству  .
.
Таким образом, находится среднее арифметическое значение элементов множества  , имеющих максимальные степени принадлежностей. Если множество X конечно, то формула приводится к виду
, имеющих максимальные степени принадлежностей. Если множество X конечно, то формула приводится к виду
где 

 – мощность множества
– мощность множества  .
.
Теория нечётких множеств и её приложения используется при управлении сложными и трудно описываемыми математически технологическими процессами. Фаззи управление не требует знания точной модели объекта. Оно организует приближённую стратегию управления, моделируя способ мышления человека и задавая алгоритм решения в лингвистичеcких переменных. Реализация управления осуществляется фаззи– контроллером с применением фаззи – логики.
ТЕМА 2. ЭЛЕМЕНТЫ ТЕОРИИ ГРАФОВ И ЕЕ ПРИЛОЖЕНИЯ
Первая работа по графам была опубликована математиком Эйлером в 1736 году. Она содержала решение задачи о кенигсбергских мостах: можно ли совершить прогулку таким образом, чтобы, выйдя из любого места города, вернуться в него, пройдя в точности один раз по каждому мосту (рис. 2.1, а).
По условию задачи не имеет значения, как проходит путь по частям суши а, b, с, d, поэтому их можно представить точками или вершинами. А так как связи осуществляются через семь мостов, то каждый из них можно изобразить линией, соединяющей эти вершины (рис. 2.1, б). Эйлер дал отрицательный ответ на вопрос задачи.
Начало развития теории графов как самостоятельной математической дисциплины положено Д. Кенигом, выпустившим в 1936 году книгу « Теория конечных и бесконечных графов». В настоящее время круг задач, решаемых с помощью аппарата теории графов, очень разнообразен: анализ и синтез цепей и систем, проектирование каналов связи и исследование процессов передачи ин-
22

формации, автоматизация проектирования, теория кодирования и теория игр, выбор оптимальных маршрутов и потоков в сетях и т. д.
c |
|
|
c |
а |
d |
а |
d |
a |
b |
|
b |
|
|
||
|
|
б |
Рис. 2.1
2.1. Основные понятия и определения. Способы задания графов
Ориентированный граф G представляет собой множество элементов с их отображениями в этом множестве и обозначается символомG = (X, Г), где X ={x1, x2 ,..., xn } – множество элементов, а Г: Х→Х – множество, определяющее
закон отображения. Поясним данное определение посредством описания различных способов задания графа: аналитического, геометрического и матричного.
X |
При аналитическом способе задания для каждого элемента хi |
множества |
|||
должно |
быть |
определено |
отображениеГ . Пусть, |
например, |
|
|
|
|
|
xi |
|
X ={x1, x2 , x3 , x4}, |
а Г x1 ={x2 , x3}, Г x2 ={x3}, Г x3 ={x2 , x4}, Г x4 ={x1, x4}. Эти |
||||
множества однозначно определяют ориентированный граф G.
При геометрическом способe задания графа элементы множества X изображаются точками плоскости и называются вершинами графа. Линии, соединяющие любые пары точек xi , x j , из которых x j является отображением xi ,
называются дугами, или ориентированными ребрами. Дуги графа имеют направление, обозначаемое стрелкой в направлении от xi к x j .
На рис. 2.2 приведен пример графа, который выше был задан аналитически. Вершины графа могут располагаться в произвольном порядке и соединяться прямыми или кривыми линиями. Ес-
ли xi = x j , |
то дуга изображается линией |
без |
стрелки и |
называется петлей. Каждую |
дугу |
( xi , x j ) можно обозначить буквой vkÎV , где V –
множество упорядоченных дуг рассматриваемого графа. Тогда граф G можно определить также как G = (X,V), где V – множество упорядоченных пар ( xi , x j ) = v k . Две вершины xi и x j называются
|
|
v2 |
|
v3 |
|
|
x2 |
x3 |
|
|
|
v1 |
v4 |
v6 |
|
|
|
|
v5 |
|
x1 |
x4 |
v7 |
Рис. 2.2
23
смежными, если существует соединяющая их дуга vk = (xi , x j ) . Если вершина
хj является одним из концов дугиvk, то говорят, что они инцидентны, т. е. вершина инцидентна дуге, а дуга инцидентна вершине. Таким образом, смежность – отношение между однородными объектами, инцидентность – между разнородными.
При матричном способе задания ориентированный граф можно описать матрицей смежности, или матрицей инцидентности. Матрица смежности RG ориентированного графа G(X, Г) с n вершинами – это квадратная матрица порядка n, элементы rij которой определяются следующим образом:
r |
ì1, |
если есть дуга, идущая из x |
i |
в x |
j |
; |
= í |
в противном случае. |
|
|
|||
ij |
î0, |
|
|
|
|
Матрица инцидентности AG ориентированного графа G(X, Г) – это прямоугольная матрица размером n×
m (n – число вершин, m – число дуг), элементы аij которой определяются следующим образом:
ì1, |
если j - я дуга выходит из i - й вершины; |
ï |
|
aij = í- 1, есть j - я дуга заходит в i - ю вершину; |
|
ï0, |
если i - я вершина не инцидентна j - й дуге. |
î |
|
Для графа, изображенного на рис. 2.2, матрицы смежности и инцидентности имеют вид
|
|
|
x1 x2 x3 x4 |
|
|
|
|
|
|
|
v1 v2 |
v3 |
v4 |
v5 v6 |
v7 |
|||||
|
x1 é0 1 1 0 ù |
|
|
|
|
x1 é 1 0 |
0 |
1 |
-1 0 0 ù |
|||||||||||
R |
= x2 |
ê0 0 1 0ú |
, |
A |
|
= x2 |
ê-1 -1 1 |
0 |
0 |
0 0 ú . |
||||||||||
G |
x |
3 |
ê |
0 1 0 1ú |
|
G |
|
x |
3 |
ê |
0 |
1 |
-1 -1 0 |
1 0 |
ú |
|||||
|
x |
ê |
1 0 0 1 |
ú |
|
|
|
|
x |
ê |
0 |
0 |
0 |
0 |
1 |
-1 |
1* |
ú |
||
|
4 |
ë |
û |
|
|
|
|
4 |
ë |
û |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Знаком * в матрице AG помечена петля v7 |
при вершине х4 . |
|
|
|
||||||||||||||||
Полустепень исхода вершины xi |
– число дуг, |
исходящих из вершины xi , |
||||||||||||||||||
обозначается r+ (x ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полустепень захода вершины xi – |
число |
дуг, |
заходящих в |
вершину xi , |
||||||||||||||||
обозначается r- (xi ) .
Иногда граф рассматривают без учета ориентации его дуг, в этом случае граф называют неориентированным.
24
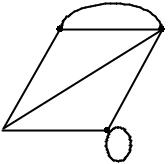
На рис. 2.3 изображен неориентированный граф, который получен из графа на рис. 2.2 удалением стрелок с дуг.
Такой неориентированный граф называется соотнесенным данному ориентированному. Будем обозначать неориентированные графы символом D = ( X ,V ) , где V – множество неупо-рядоченных пap (хi, хj) = vk
|
|
v2 |
x2 |
v3 |
x3 |
|
||
v1 |
v4 |
v6 |
|
|
v5
x1
x4 v7
Рис. 2.3
Матрица смежности RD неориентированного графа D = ( X ,V ) с n вер-
шинами – это квадратная матрица порядка n, элементы rij которой определяются следующим образом:
rij |
ì l, если i - я и j - я вершины соединены l ребрами; |
|
= í |
0, в противном случае. |
|
|
î |
|
Матрица смежности неориентированного графа всегда симметрична относительно главной диагонали.
Матрица инцидентности АD неориентированного графаD = ( X ,V )
представляет собой прямоугольную матрицу размером n×m (n – число вершин, m – число ребер), элементы aij которой определяются следующим образом:
aij |
= |
ì1, если i - я вершина инцидентна j - му ребру; |
||||||||
í |
|
|
|
|
|
|
|
|||
|
|
|
î 0, в противном случае. |
|
|
|
|
|
||
Для графа, изображенного на рис. 2.3, матрицы смежности и инцидентно- |
||||||||||
сти имеют вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 x2 x3 x4 |
|
|
v1 v2 v3 v4 v5 v6 v7 |
|
|||
|
|
x1 é0 1 1 1 ù |
|
x1 é1 0 0 1 1 |
0 0 ù |
|||||
RD |
= |
x |
ê1 0 2 0 ú , |
AD = |
x |
ê1 1 1 0 0 |
0 0 ú |
|||
|
2 ê |
ú |
|
2 ê |
1 |
0 |
ú . |
|||
|
|
x3 ê1 2 0 1ú |
|
x3 ê0 1 1 1 0 |
ú |
|||||
|
|
x4 ë1 0 1 1û |
|
x4 ë0 0 0 0 1 |
1 1 |
û |
||||
Степенью вершины xi |
в графе D называется число ребер, инцидентных |
|||||||||
вершине xi . Обозначается |
ri = r(xi ) . |
Вершина хk степени rk |
=1 называется |
|||||||
концевой, или |
|
висячей вершиной. Вершина |
|
степени нуль– |
изолированная |
|||||
вершина. Сумма степеней вершин графа равна удвоенному |
числу его ребер: |
|||||||||
åri = 2m . |
|
|
|
|
|
|
|
|
|
|
25