

Среднеквадратический эллипс ошибок, круговая вероятная ошибка
Проанализируем
более подробно характеристики,
используемые для описания свойств
двухмерных гауссовских векторов.
Двухмерный случай весьма важен в задачах
обработки статистической информации.
Так, при решении навигационных задач
на плоскости нередко полагают, что
координаты объекта представляют собой
гауссовский случайный вектор с
математическим ожиданием в точке его
предполагаемого местонахождения. Для
описания неопределенности расположения
точки на плоскости используют введенные
выше эллипсы равных вероятностей, в
частности эллипс, соответствующий
уравнению (3.35) при
![]() .
Поскольку этот эллипс пересекает оси
в точках, совпадающих со значениями
соответствующих СКО, т.е. при
.
Поскольку этот эллипс пересекает оси
в точках, совпадающих со значениями
соответствующих СКО, т.е. при![]() ,
а при
,
а при![]()
![]() ,
он получил наименованиесреднеквадратического
эллипса ошибок, или стандартного эллипса
[23]. В
навигационных приложениях для его
описания используют параметры
эллипса:
большую
,
он получил наименованиесреднеквадратического
эллипса ошибок, или стандартного эллипса
[23]. В
навигационных приложениях для его
описания используют параметры
эллипса:
большую
![]() ималую
ималую
![]() полуоси
и дирекционный
угол
полуоси
и дирекционный
угол
![]() ,
задающий ориентацию большой полуоси
относительно оси
,
задающий ориентацию большой полуоси
относительно оси![]() .
Эти три параметра полностью определяют
матрицу ковариаций двухмерной гауссовской
плотности. На рис. 3.4 изображен частный
случай, когда
.
Эти три параметра полностью определяют
матрицу ковариаций двухмерной гауссовской
плотности. На рис. 3.4 изображен частный
случай, когда![]() ,
,
![]() ,
,
![]() ,
и таким
образом
,
и таким
образом
![]() , (3.36)
, (3.36)
т.е. размеры полуосей эллипса определяют значения СКО по каждой координате.
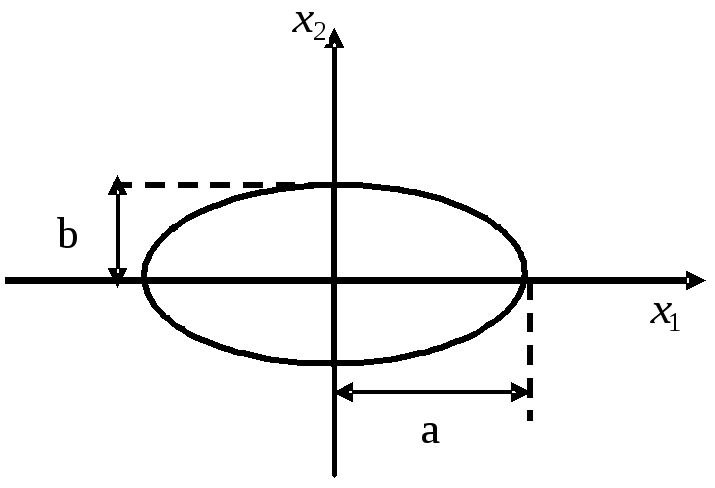
Рис. 1.2.4. Эллипс ошибок для двухмерного гауссовского вектора
с независимыми компонентами
При оценивании
точности местоположения подвижных
объектов весьма важным представляется
умение охарактеризовать неопределенность
местоположения одним
числом. Для
этих целей обычно используют значения
вероятности
попадания
точки на плоскости в ту или иную заданную
область
![]() .
Для двухмерного центрированного
гауссовского вектора с плотностью
.
Для двухмерного центрированного
гауссовского вектора с плотностью

эта вероятность определяется как
 , (3.37)
, (3.37)
Если в качестве
![]() выступает область, ограниченная
выступает область, ограниченная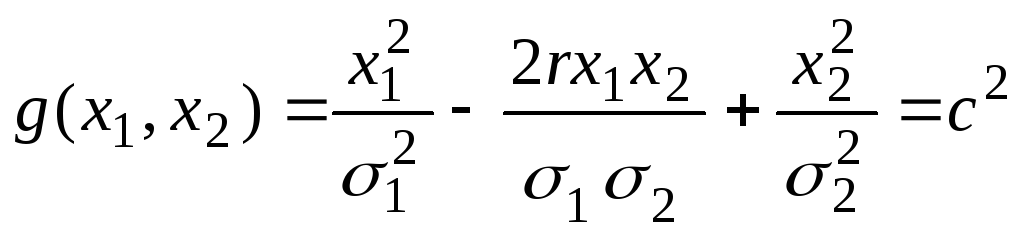
то, переходя к полярным координатам, можно показать, что [44, с. 68]
 . (3.38)
. (3.38)
Для случая
независимых случайных величин при
![]() эллипс превращается в окружность
радиусом
эллипс превращается в окружность
радиусом![]() и, таким образом, из (3.38) получаем, что
вероятность нахождения случайного
вектора в круге с таким радиусом
определяется введенным в разделе 2
распределением Рэлея
и, таким образом, из (3.38) получаем, что
вероятность нахождения случайного
вектора в круге с таким радиусом
определяется введенным в разделе 2
распределением Рэлея
 ,
R>0. (1.39)
,
R>0. (1.39)
Круговая вероятная
ошибка (КВО).
Величина
![]() ,
соответствующая 50-процентному попаданию
гауссовского случайного вектора в круг
заданного радиуса, т.е. когда вероятность
попадания равна 0,5, называетсякруговой
вероятной ошибкой (КВО),
а круг, соответственно, кругом
равных вероятностей.
В англоязычной литературе для круговой
вероятной ошибки используется термин
circular error
probable (CEP).
,
соответствующая 50-процентному попаданию
гауссовского случайного вектора в круг
заданного радиуса, т.е. когда вероятность
попадания равна 0,5, называетсякруговой
вероятной ошибкой (КВО),
а круг, соответственно, кругом
равных вероятностей.
В англоязычной литературе для круговой
вероятной ошибки используется термин
circular error
probable (CEP).
Отметим, что для
независимых
случайных величин с равными
СКО
![]() ,
50-процентное попадание в круг (P=0,5)
достигается при
,
50-процентное попадание в круг (P=0,5)
достигается при
![]() 1,177.
Для круга радиуса
1,177.
Для круга радиуса
![]() обеспечивается попадание с вероятностьюP=0,997.
В случае если
обеспечивается попадание с вероятностьюP=0,997.
В случае если
![]() радиус круга, при котором достигается
вероятность попадания в него, равная
0,5, либо другой вероятности следует
отыскивать с помощью соотношения (3.37).
радиус круга, при котором достигается
вероятность попадания в него, равная
0,5, либо другой вероятности следует
отыскивать с помощью соотношения (3.37).
Радиальная среднеквадратическая ошибка (Distance Root Mean Square (DRMS)
Эта ошибка определяется как
![]() . (3.40)
. (3.40)
Отметим, что вероятность попадания в круг такого радиуса составляет величину 0.65-0.68 в зависимости от значений параметров эллипса рассеивания.
Удвоенная радиальная среднеквадратическая ошибка (2DRMS).
Вероятность попадания в круг такого удвоенного радиуса зависит от конкретных соотношений СКО и коэффициента корреляции, а примерная ее величина определяется как P=0,95.
Понятия, аналогичные приведенным выше, используются и для трехмерного гауссовского вектора. При этом вводится величина сферической вероятной ошибки (СВО) и сферы равных вероятностей (spherical error probable (SEP) и sphere of equal probability (SEP)). Трехмерное гауссовское распределение широко используется при описании ошибок местоположения подвижных объектов в пространстве, в частности для летательных аппаратов.