


Chapter 2 Mathematics
2
2.1Notation
Mathematics is, of course, a vast subject, and so here we concentrate on those mathematical methods and relationships that are most often applied in the physical sciences and engineering.
Although there is a high degree of consistency in accepted mathematical notation, there is some variation. For example the spherical harmonics, Ylm, can be written Ylm, and there is some freedom with their signs. In general, the conventions chosen here follow common practice as closely as possible, whilst maintaining consistency with the rest of the handbook.
In particular:
scalars |
a |
|
|
general vectors |
a |
||||
unit vectors |
aˆ |
|
|
scalar product |
a · b |
||||
vector cross-product |
a×b |
gradient operator |
|
||||||
|
2 |
|
|
|
|
df |
|||
Laplacian operator |
|
|
derivative |
|
|
etc. |
|||
|
|
|
dx |
||||||
partial derivatives |
|
∂f |
etc. |
derivative of r with |
˙r |
||||
∂x |
respect to t |
||||||||
|
|
|
L dl |
||||||
nth derivative |
|
dnf |
|
closed loop integral |
|||||
|
dxn |
||||||||
closed surface integral |
S |
ds |
matrix |
A or aij |
|||||
|
x |
|
|
|
|
n |
|||
mean value (of x) |
|
|
binomial coe cient |
r |
|||||
factorial |
! |
|
|
unit imaginary (i2 = −1) |
i |
||||
exponential constant |
e |
|
|
modulus (of x) |
|x| |
||||
natural logarithm |
ln |
|
|
log to base 10 |
log10 |
||||
20 |
Mathematics |
|
|
2.2 Vectors and matrices
Vector algebra
|
Scalar producta |
a · b = |a||b| cosθ |
|
|
|
|
|
|
|
|
(2.1) |
|
|
||||
|
|
|
|
|
|
|
|
|
xˆ |
yˆ |
zˆ |
|
|
|
a |
||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
a×b = |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
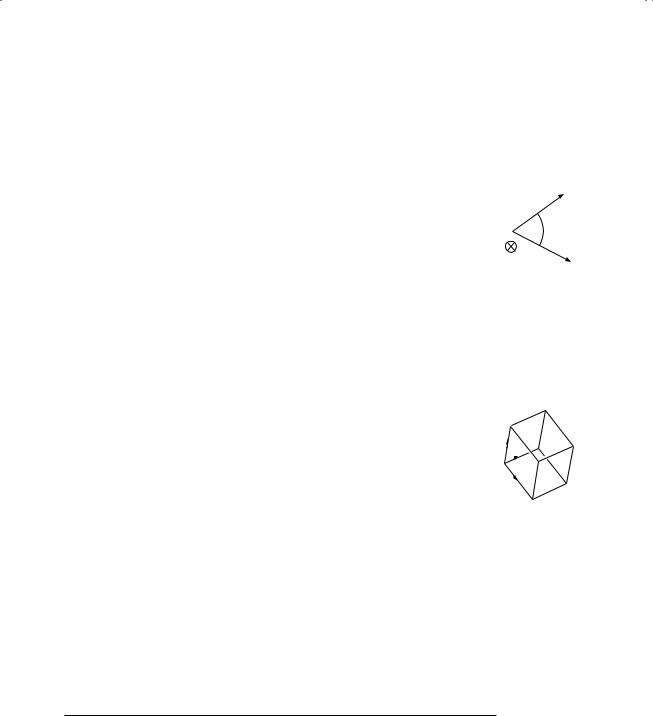
Vector productb |
a b |
|
sinθnˆ = ax |
ay |
az |
|
(2.2) |
|
θ |
|||||||
|
|
|
| || | |
|
|
|
bx |
by |
bz |
|
|
|
b |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nˆ |
(in) |
|
|
a · b = b · a |
|
|
|
|
|
|
|
|
|
|
|
(2.3) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Product rules |
a×b = −b×a |
|
|
|
|
|
|
|
|
|
(2.4) |
|
|
|||
|
|
a · (b + c) = (a · b) + (a · c) |
|
|
|
(2.5) |
|
|
|||||||||
|
|
a×(b + c) = (a×b) + (a×c) |
|
|
|
(2.6) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Lagrange’s |
(a×b) · (c×d ) = (a · c)(b · d ) − (a · d )(b · c) |
(2.7) |
|
|
||||||||||||
|
identity |
|
|
||||||||||||||
|
|
|
|
ax |
ay |
az |
|
|
|
|
|
|
|
||||
|
|
(a×b) c = bx |
by |
bz |
· |
|
|
(2.8) |
|
|
|||||||
|
|
· |
|
|
× |
· |
|
|
|
× |
|
|
|
|
|
||
|
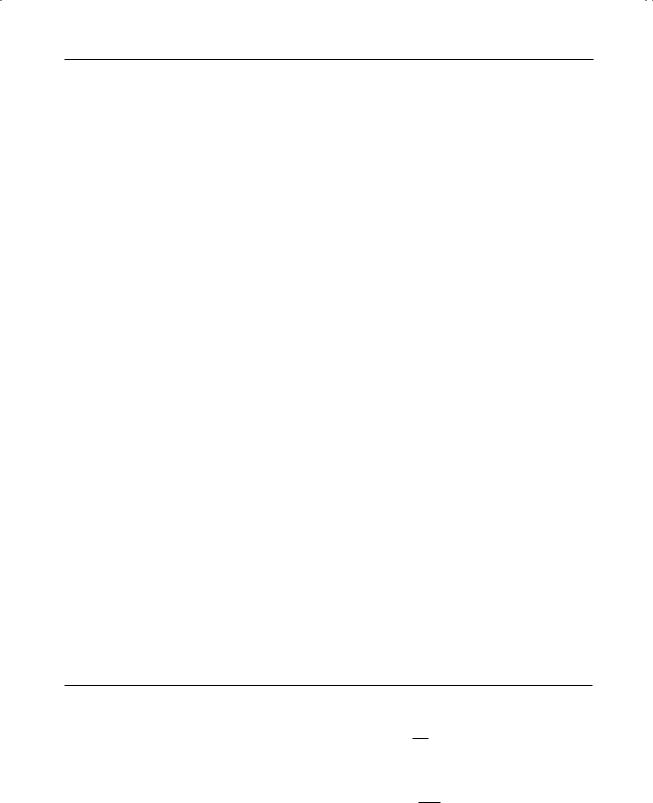
Scalar triple |
cx |
cy |
cz |
|
|
|
|
|
a |
|
||||||
|
product |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.9) |
|
c |
|
|
|
= (b c) |
|
a = (c a) b |
|
|
||||||||||
|
|
|
= volume of parallelepiped |
(2.10) |
b |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||||
|
Vector triple |
(a×b)×c = (a · c)b − (b · c)a |
|
|
|
(2.11) |
|
|
|||||||||
|
product |
a×(b×c) = (a · c)b − |
(a · b)c |
|
|
|
(2.12) |
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
a = (b |
|
c)/[(a |
b) |
· |
c] |
|
|
|
(2.13) |
|
|
||||
|
|
|
× |
|
× |
|
|
|
|
|
|
|
|
|
|||
|
|
b = (c |
|
a)/[(a |
b) |
· |
c] |
|
|
|
(2.14) |
|
|
||||
|
Reciprocal vectors |
|
× |
|
|
× |
b) |
|
c] |
|
|
|
(2.15) |
|
|
||
|
|
c = (a |
|
b)/[(a |
· |
|
|
|
|
|
|
||||||
|
|
|
× |
|
× |
|
|
|
|
|
|
|
|
|
|||
|
|
(a · a) = (b · b) = (c · c) = 1 |
|
|
(2.16) |
|
|
||||||||||
|
Vector a with |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
respect to a |
a = (e1 · a)e1 + (e2 · a)e2 + (e3 |
· a)e3 |
(2.17) |
|
|
|||||||||||
|
nonorthogonal |
|
|
||||||||||||||
|
basis {e1,e2,e3}c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Also known as the “dot product” or the “inner product.” |
|
|
|
|
|
|
||||||||||
bAlso known as the “cross-product.” nˆ is a unit vector making a right-handed set with a and b. cThe prime ( ) denotes a reciprocal vector.
2.2 Vectors and matrices
Common three-dimensional coordinate systems
z
ρ
|
|
point P |
|
|
θ |
|
|
|
r |
|
|
|
|
y |
|
x |
φ |
|
|
|
|
|
|
|
|
ρ = (x2 + y2)1/2 |
(2.21) |
x = ρcosφ = rsinθcosφ |
(2.18) |
r = (x2 + y2 + z2)1/2 |
|
y = ρsinφ = rsinθsinφ |
(2.19) |
(2.22) |
|
|
|
||
z = rcosθ |
(2.20) |
θ = arccos(z/r) |
(2.23) |
|
|
||
|
|
φ = arctan(y/x) |
(2.24) |
|
|
|
|
coordinate system: |
rectangular |
spherical polar |
cylindrical polar |
coordinates of P : |
(x,y,z) |
(r,θ,φ) |
(ρ,φ,z) |
volume element: |
dx dy dz |
r2 sinθ dr dθ dφ |
ρ dρ dz dφ |
metric elementsa (h1,h2,h3): |
(1,1,1) |
(1,r,rsinθ) |
(1,ρ,1) |
aIn an orthogonal coordinate system (parameterised by coordinates q1,q2,q3), the di erential line element dl is obtained from (dl)2 = (h1 dq1)2 + (h2 dq2)2 + (h3 dq3)2.
21
2
Gradient
Rectangular |
f = |
∂f |
|
|
|
∂f |
|
∂f |
|
|
|
|
f |
scalar field |
||||||||||||
coordinates |
|
|
|
xˆ + |
|
|
|
|
|
|
yˆ |
+ |
|
|
|
zˆ |
|
|
|
(2.25) |
|
|
||||
∂x |
∂y |
∂z |
|
|
|
ˆ |
unit vector |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Cylindrical |
f = |
∂f |
|
|
|
1 ∂f ˆ |
∂f |
|
|
|
|
ρ |
distance from the |
|||||||||||||
coordinates |
|
|
|
ρˆ + |
|
|
|
|
|
|
φ + |
|
zˆ |
|
|
|
(2.26) |
|
z axis |
|||||||
∂ρ |
r |
∂φ |
∂z |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Spherical polar |
f = |
∂f |
|
|
1 ∂f |
ˆ |
1 |
|
|
∂f |
ˆ |
|
|
|
||||||||||||
coordinates |
∂r |
|
rˆ + |
r |
|
∂θ |
θ + |
rsinθ |
|
∂φ |
φ |
(2.27) |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
General |
|
qˆ1 |
|
∂f |
|
|
|
|
|
|
qˆ2 |
|
∂f |
|
qˆ3 |
|
∂f |
|
|
qi |
basis |
|||||
orthogonal |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f = h1 ∂q1 |
+ h2 ∂q2 |
+ h3 ∂q3 |
|
(2.28) |
hi |
metric elements |
||||||||||||||||||||
coordinates |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 Mathematics
Divergence
Rectangular |
|
|
∂Ax |
|
|
∂Ay |
|
|
∂Az |
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
vector field |
|||||||
· |
A = |
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
(2.29) |
A |
|
ith component |
|||||||||||||
coordinates |
∂x |
|
∂y |
∂z |
|
|
|
|
|
|
|
|
|
i |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
of A |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Cylindrical |
· A = |
1 ∂(ρAρ) |
|
1 ∂Aφ |
|
|
∂Az |
|
|
|
|
|
|
ρ |
|
distance from |
|||||||||||||||
coordinates |
|
|
|
|
|
|
|
|
+ |
|
|
+ |
|
|
|
|
|
|
(2.30) |
|
|
the z axis |
|||||||||
ρ |
∂ρ |
|
|
|
ρ ∂φ |
∂z |
|
|
|
|
|
||||||||||||||||||||
Spherical polar |
|
|
1 ∂(r2Ar) |
|
1 |
|
|
∂(Aθ sinθ) |
1 |
|
∂Aφ |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· A = r2 |
∂r |
|
|
+ rsinθ |
|
|
|
∂θ |
|
+ rsinθ |
|
∂φ |
|
|
|
||||||||||||||||
coordinates |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.31) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
General |
· |
A = |
1 |
|
|
|
∂ |
|
(A1h2h3) + |
|
∂ |
(A2h3h1) |
|
|
|
|
|
|
|||||||||||||
h1h2h3 |
∂q1 |
∂q2 |
|
|
|
qi |
basis |
||||||||||||||||||||||||
orthogonal |
|
|
|
|
|
|
|
(A3h1h2) |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
hi |
metric |
|||||
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
(2.32) |
|
|
elements |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂q3 |
|
|
|||||||||||||
Curl
|
|
|
|
|
|
|
xˆ |
|
|
|
|
yˆ |
|
|
zˆ |
|
|
|
|
|
|
|
|
|
|
|
ˆ |
unit vector |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Rectangular |
× |
A = |
∂/∂x |
|
∂/∂y |
∂/∂z |
|
|
|
|
|
(2.33) |
A |
vector field |
|||||||||||||||
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ai |
ith component |
||
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Ax |
|
|
|
|
|
|
Az |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ay |
|
|
|
|
|
|
|
|
|
|
|
|
|
of A |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Cylindrical |
|
|
|
ρˆ /ρ |
|
|
|
φ |
|
|
zˆ/ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
A = |
∂/∂ρ |
|
∂/∂φ |
∂/∂z |
|
|
|
|
|
(2.34) |
ρ |
distance from |
||||||||||||||||
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
the z axis |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
ˆ |
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Aρ |
|
|
|
|
ρAφ |
|
|
Az |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Spherical polar |
|
|
|
rˆ |
/(r |
|
sinθ) |
|
θ/(rsinθ) |
|
φ/r |
|
|
|
|
|
|
|
|
||||||||||
|
A = |
|
∂/∂r |
|
|
|
∂/∂θ |
|
|
∂/∂φ |
(2.35) |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ar |
|
|
|
|
rAθ |
|
|
rAφ sin |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ |
|
|
|
|
|
|
|
||||||||
General |
|
|
|
|
|
|
|
|
|
qˆ1h1 |
qˆ2h2 |
qˆ3h3 |
|
|
|
|
|
|
|
qi |
basis |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
orthogonal |
× |
A = |
|
|
1 |
|
|
|
∂/∂q |
|
|
∂/∂q |
|
∂/∂q |
|
|
|
(2.36) |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
h h h |
|
|
|
|
1 |
|
|
2 |
|
3 |
|
|
|
|
|
|
|
hi |
metric |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
coordinates |
|
|
|
1 2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
elements |
||||
|
|
|
|
|
|
|
|
h2A2 |
h3A3 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
h1A1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Radial formsa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1/r) = |
−r |
|
(2.41) |
|
||||||||
r = |
|
|
|
(2.37) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r31 |
|
|
|
|||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
· r = 3 |
|
(2.38) |
|
|
|
|
|
|
|
|
|
|
· (r/r2) = |
|
|
(2.42) |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|||||||||||||||||
r2 = 2r |
|
(2.39) |
|
|
|
|
|
|
|
|
|
|
|
(1/r2) = |
|
−2r |
(2.43) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r4 |
|
|
|
|||||
· (rr) = 4r |
|
(2.40) |
|
|
|
|
|
|
|
|
|
|
· (r/r3) = 4πδ(r) |
(2.44) |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aNote that the curl of any purely radial function is zero. δ(r) is the Dirac delta function.

2.2 Vectors and matrices |
23 |
|
|
Laplacian (scalar)
Rectangular |
|
2 |
|
∂2f |
|
∂2f |
|
∂2f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
coordinates |
f = |
|
|
|
+ |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.45) |
|
f scalar field |
|
|
|||||||||
|
∂x2 |
∂y2 |
∂z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ distance |
|
||||
Cylindrical |
|
2 |
1 |
|
∂ |
|
|
∂f |
|
|
|
1 ∂2f |
|
|
∂2f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
f = |
|
|
|
|
|
ρ |
|
|
+ |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
(2.46) |
|
|
|
|
|||||||||||
coordinates |
|
ρ |
|
∂ρ |
|
∂ρ |
ρ2 |
|
∂φ2 |
∂z2 |
|
|
|
|
|
|
|
|
|
|
z axis |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
from the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Spherical |
|
|
1 |
∂ |
|
|
∂f |
|
|
1 |
|
|
|
∂ |
|
|
|
∂f |
|
|
1 |
|
∂2f |
|
|
|
|
|
|||||||||||||||||
polar |
2f = |
|
|
r2 |
|
|
+ |
|
|
|
|
|
sinθ |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
r2 |
∂r |
∂r |
r2 sinθ |
∂θ |
∂θ |
r2 sin2 θ |
∂φ2 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.47) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
General |
|
2f = |
|
1 |
|
|
|
∂ |
|
|
h2h3 ∂f |
+ |
∂ |
|
h3h1 |
∂f |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
∂q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
orthogonal |
|
h1h2h3 |
h1 ∂q1 |
|
|
|
∂q2 |
h2 |
∂q2 |
|
|
|
|
|
|
qi basis |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
h1h2 |
|
∂f |
|
|
|
|
|
|
|
hi metric |
|
|
|||
coordinates |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
(2.48) |
|
elements |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂q3 |
h3 |
∂q3 |
|
|
|
|
|||||||||||||||||
Di erential operator identities |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(fg) ≡ f g + g f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.49) |
|
|
|
|
|
|
|
|
|||||||||
· (fA) ≡ f · A + A · f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.50) |
|
|
|
|
|
|
|
|
||||||||||||||
×(fA) ≡ f ×A + ( f)×A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.51) |
|
|
|
|
|
|
|
|
||||||||||||||
(A · B) ≡ A×( ×B) + (A · )B + B×( ×A) + (B · )A |
|
|
(2.52) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
· (A×B) ≡ B · ( ×A) − A · ( ×B) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.53) |
|
f,g |
|
scalar fields |
|
|
||||||||||||||||||
×(A×B) ≡ A( · B) − B( · A) + (B · )A − (A · )B |
|
|
|
|
|
(2.54) |
|
A,B |
|
vector fields |
|
|
|||||||||||||||||||||||||||||||||
· ( f) ≡ 2f ≡ f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.55) |
|
|
|
|
|
|
|
|
|||||||||
×( f) ≡ 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.56) |
|
|
|
|
|
|
|
|
||
· ( ×A) ≡ 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.57) |
|
|
|
|
|
|
|
|
||
×( ×A) ≡ ( · A) − 2A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.58) |
|
|
|
|
|
|
|
|
||||||||||||||
Vector integral transformations |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Gauss’s |
|
|
V ( · A) dV = Sc A · ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
vector field |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dV |
volume element |
|
|
||||||||||||||||||||||||
(Divergence) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.59) |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sc |
closed surface |
|
|
||||||||||||||||||||||||||
theorem |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
volume enclosed |
|
|
|||
|
|
|
S ( ×A) · ds = L A · dl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
surface |
|
|
||||||||||||||||||||||
Stokes’s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.60) |
|
ds |
surface element |
|
|
||||||||||||||||||||||||
theorem |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
loop bounding S |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dl |
line element |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Green’s first |
|
|
S (f g) · ds = V · (f g) dV |
|
|
|
|
|
|
(2.61) |
|
f,g |
scalar fields |
|
|
||||||||||||||||||||||||||||||
theorem |
|
|
|
|
|
|
|
|
|
|
|
= V [f 2g + ( f) · ( g)] dV |
|
|
(2.62) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Green’s second |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
S [f( g) − g( f)] · ds = V (f g − g f) dV |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
theorem |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.63) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 Mathematics
Matrix algebraa
|
|
a11 |
a12 |
· · · |
a1n |
|
|
|
|
|
|
a21 |
a22 |
a2n |
|
A |
m by n matrix |
||
Matrix definition |
|
A = ... |
... |
· · · ... |
|
(2.64) |
aij |
matrix elements |
|
|
|
|
a |
· · · |
a |
|
|
|
|
|
|
a |
· · · |
|
|
|
|
||
|
|
m1 |
m2 |
|
mn |
|
|
|
|
Matrix addition |
|
C = A + B |
if |
cij = aij + bij |
(2.65) |
|
|
||
Matrix |
|
C = AB if |
cij = aikbkj |
|
(2.66) |
|
|
||
|
(AB)C = A(BC) |
|
|
|
(2.67) |
|
|
||
multiplication |
|
|
|
|
|
|
|||
|
A(B + C) = AB + AC |
|
|
(2.68) |
|
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Transpose matrix |
b |
a˜ij = aji |
|
|
|
|
(2.69) |
˜aij |
transpose matrix |
|
|
|
|
|
|
||||
|
|
˜ |
˜ ˜ |
|
|
(2.70) |
|
(sometimes aijT , or aij ) |
|
|
|
(AB...N) = N...BA |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
complex conjugate (of |
Adjoint matrix |
|
A† = A˜ |
|
|
|
|
(2.71) |
|
each component) |
(definition 1)c |
|
(AB...N)† = N† ...B†A† |
|
(2.72) |
† |
adjoint (or Hermitian |
|||
|
|
|
|
|
|
|
|
|
conjugate) |
|
|
|
|
|
|
|
H |
Hermitian (or |
|
Hermitian matrixd |
H† = H |
|
|
|
|
(2.73) |
|||
|
|
|
|
|
|
|
|
|
self-adjoint) matrix |
|
|
|
|
|
|
|
|
|
|
examples: |
|
|
|
|
|
|
|
|
|
A = |
a11 |
a12 |
a13 |
|
|
|
a21 |
a22 |
a23 |
|
|
|
a31 |
a32 |
a33 |
|
|
A˜ = |
|
a11 |
a21 |
a31 |
|
a12 |
a22 |
a32 |
|||
|
|
|
|
|
|
|
a13 |
a23 |
a33 |
|
|
|
b11 |
b12 |
b13 |
|
|
|
|
B = |
b21 |
b22 |
b23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
b31 |
b32 |
b33 |
|
|
|
|
|
a11 + b11 |
a12 + b12 |
a13 |
+ b13 |
|
||
A + B = |
a21 + b21 |
a22 + b22 |
a23 |
+ b23 |
|||
|
|
|
|
|
|
|
|
|
a31 + b31 |
a32 + b32 |
a33 |
+ b33 |
|
||
|
a11 b11 |
+ a12 b21 + a13 b31 |
a11 b12 + a12 b22 + a13 b32 |
a11 b13 |
+ a12 b23 |
+ a13 b33 |
|
AB = |
a21 b11 |
+ a22 b21 + a23 b31 |
a21 b12 + a22 b22 + a23 b32 |
a21 b13 |
+ a22 b23 |
+ a23 b33 |
|
|
|
|
|
|
|
|
|
|
a31 b11 |
+ a32 b21 + a33 b31 |
a31 b12 + a32 b22 + a33 b32 |
a31 b13 |
+ a32 b23 |
+ a33 b33 |
|
aTerms are implicitly summed over repeated su ces; hence aikbkj equals bSee also Equation (2.85).
cOr “Hermitian conjugate matrix.” The term “adjoint” is used in quantum physics for the transpose conjugate of a matrix and in linear algebra for the transpose matrix of its cofactors. These definitions are not compatible, but both are widely used [cf. Equation (2.80)].
dHermitian matrices must also be square (see next table).
2.2 Vectors and matrices |
25 |
|
|
Square matricesa
|
|
|
|
|
|
|
|
|
|
trA = aii |
|
|
|
|
|
|
|
|
|
|
|
|
(2.74) |
|
A |
|
|
square matrix |
|
|
|||||||||
|
Trace |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aij |
|
|
matrix elements |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
tr(AB) = tr(BA) |
|
|
|
|
|
|
|
(2.75) |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aii |
|
|
implicitly = i aii |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
detA = ijk...a1ia2j a3k ... |
|
|
|
|
|
(2.76) |
|
tr |
|
|
trace |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Determinant |
b |
|
|
|
|
= ( |
− |
1)i+1ai1Mi1 |
|
|
|
|
|
(2.77) |
|
det |
|
|
determinant (or |A|) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.78) |
|
Mij |
|
minor of element aij |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= ai1Ci1 |
|
|
|
|
|
|
|
|
|
|
Cij |
|
|
cofactor of the |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
det(AB...N) = detAdetB...detN |
|
|
(2.79) |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
element aij |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
adj |
|
|
adjoint (sometimes |
|
|
|||
|
Adjoint matrix |
|
|
|
|
|
˜ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
= Cji |
|
|
|
|
|
|
|
(2.80) |
|
|
|
|
|
|
|
ˆ |
|
|
|||||||||||||||
|
(definition 2)c |
|
adjA = Cij |
|
|
|
|
|
|
|
|
|
|
|
|
written A) |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
transpose |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
aij−1 = |
|
Cji |
|
= |
adjA |
|
|
|
|
|
|
(2.81) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Inverse matrix |
|
|
|
|
detA |
detA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
AA−1 = 1 |
|
|
|
|
|
|
|
|
|
|
|
(2.82) |
|
1 |
|
|
unit matrix |
|
|
||||||||||||||||||
|
(detA = 0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
(AB...N)−1 = N−1 ...B−1A−1 |
|
|
|
(2.83) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Orthogonality |
|
aij aik = δjk |
|
|
|
|
|
|
|
|
|
|
|
(2.84) |
|
δjk |
|
|
Kronecker delta (= 1 |
|
|
|||||||||||||||||
|
condition |
|
|
|
|
|
i.e., A˜ = A−1 |
|
|
|
|
|
|
|
(2.85) |
|
|
|
|
|
if i = j, = 0 otherwise) |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
If |
|
|
|
|
˜ |
|
|
A is symmetric |
|
|
|
(2.86) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
Symmetry |
|
|
|
|
A = A, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
If |
|
|
|
|
|
˜ |
|
A is antisymmetric |
(2.87) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
A = −A, |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Unitary matrix |
|
U† = U−1 |
|
|
|
|
|
|
|
|
|
|
|
(2.88) |
|
U |
|
|
unitary matrix |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
† |
|
|
|
Hermitian conjugate |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
examples: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
a11 |
|
a12 |
a13 |
|
|
|
|
|
|
|
|
|
|
|
B = |
b11 |
b12 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
A = a21 |
|
a22 |
a23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b21 b22 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
a31 a32 |
a33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
trA = a11 + a22 + a33 |
|
|
|
|
|
|
|
|
|
|
|
|
trB = b11 + b22 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
detA = a11 a22 a33 − a11 a23 a32 − a21 a12 a33 + a21 a13 a32 + a31 a12 a23 − a31 a13 a22 |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
detB = b11 b22 − b12 b21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
a22 a33 − a23 a32 |
|
|
a12 a33 + a13 a32 |
|
|
a12 a23 − a13 a22 |
|
|
|
|
|
|||||||||||||||||||
|
|
A−1 = |
|
|
1 |
|
|
a21 a33 + a23 a31 |
|
−a11 a33 |
− |
a13 a31 |
|
|
a11 a23 + a13 a21 |
|
|
|
|
|
|||||||||||||||||||
|
|
detA |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
−a21 a32 |
− |
a22 a31 |
|
− |
|
|
|
|
|
−a11 a22 |
− |
a12 a21 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
a11 a32 + a12 a31 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
B−1 = |
|
|
1 |
|
|
|
|
b22 |
−b12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
detB |
|
−b21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
b11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
aTerms are implicitly summed over repeated su ces; hence aikbkj equals |
k aikbkj . |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
b |
ijk... is defined as the natural extension of Equation (2.443) to |
n |
dimensions (see page 50). M |
ij |
is the determinant |
|
|||||||||||||||||||||||||||||||||
|
|
- |
|
|
|
ij = (−1) |
i+j |
M |
|
|
|
|
|||||||||||||||||||||||||||
of the matrix |
A |
with the ith row and the jth column deleted. The cofactor C |
|
|
ij . |
|
|
|
|
||||||||||||||||||||||||||||||
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Or “adjugate matrix.” See the footnote to Equation (2.71) for a discussion of the term “adjoint.” |
|
|||||||||||||||||||||||||||||||||||||

26 Mathematics
Commutators
Commutator |
[A,B] = AB − BA = −[B,A] |
(2.89) |
[·,·] commutator |
definition |
|||
|
|
|
|
Adjoint |
[A,B]† = [B†,A†] |
(2.90) |
† adjoint |
|
|
|
|
Distribution |
[A + B,C] = [A,C] + [B,C] |
(2.91) |
|
|
|
|
|
Association |
[AB,C] = A[B,C] + [A,C]B |
(2.92) |
|
|
|
|
|
Jacobi identity |
[A,[B,C]] = [B,[A,C]] − [C,[A,B]] |
(2.93) |
|
|
|
|
|
Pauli matrices
|
σ1 = 0 |
1 |
σ2 = |
0 |
i |
|
σ |
Pauli spin matrices |
|||
Pauli matrices |
1 |
0 |
|
i |
−0 |
|
1i |
2 |
× |
2 unit matrix |
|
1 |
0 |
|
1 |
0 |
|
|
|
|
|||
|
|
|
|
2 |
= −1 |
||||||
|
σ3 = 0 |
−1 |
1 = 0 |
1 |
(2.94) |
i |
i |
|
|||
Anticommuta- |
σiσj + σj σi = 2δij 1 |
|
|
|
(2.95) |
δij |
Kronecker delta |
||||
tion |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cyclic |
σiσj = iσk |
|
|
|
|
(2.96) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
permutation |
(σi)2 = 1 |
|
|
|
|
(2.97) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rotation matricesa
Rotation |
|
|
|
|
1 |
|
0 |
|
0 |
|
|
|
Ri(θ) |
matrix for rotation |
|
|
R1(θ) = |
0 |
|
cosθ |
|
sinθ |
|
(2.98) |
|
about the ith axis |
|||||
about x1 |
|
|
|
|
|||||||||||
|
|
|
|
0 |
− sinθ |
|
cosθ |
|
θ |
rotation angle |
|
||||
Rotation |
|
|
|
|
cosθ |
0 |
− |
sinθ |
|
|
|
|
|
||
|
R2(θ) = |
0 |
1 |
0 |
|
(2.99) |
|
|
|
||||||
about x2 |
|
|
|
|
|
||||||||||
|
|
|
|
sinθ |
0 |
|
cosθ |
|
|
|
|
||||
Rotation |
|
|
|
|
|
cosθ sinθ 0 |
|
|
α |
rotation about x3 |
|||||
|
R3 |
(θ) = |
|
sinθ cosθ |
0 |
(2.100) |
|
|
|
||||||
about x3 |
|
|
|
|
|||||||||||
|
|
|
|
− |
|
β |
rotation about x2 |
||||||||
|
|
|
|
0 |
|
0 |
|
1 |
|
γ |
rotation about x3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Euler angles |
|
|
|
|
|
|
|
|
|
|
|
|
R |
rotation matrix |
|
|
cosγcosβ cosα |
sinγsinα |
|
|
cosγcosβ sinα+ sinγcosα |
cosγsinβ |
|||||||||
R(α,β,γ) = |
sinγcosβ cosα |
−cosγsinα |
|
− |
sinγcosβ sinα+ cosγcosα |
− sinγsinβ |
|||||||||
|
− |
|
|
sinβ cos−α |
|
|
|
sinβ sinα |
cosβ |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.101) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aAngles are in the right-handed sense for rotation of axes, or the left-handed sense for rotation of vectors. i.e., a vector v is given a right-handed rotation of θ about the x3-axis using R3(−θ)v → v . Conventionally, x1 ≡ x, x2 ≡ y, and x3 ≡ z.