


74 |
Dynamics and mechanics |
|
|
3.5Rigid body dynamics
Moment of inertia tensor
Moment of |
|
Iij = (r2δij − xixj ) dm |
|
|
|
(3.136) |
r |
r2 = x2 + y2 + z2 |
|||||||
inertia tensora |
|
|
|
|
δij |
Kronecker delta |
|||||||||
I = % |
(y2 + z2) dm |
|
− xy dm |
|
− xz dm |
|
|
I |
moment of inertia |
||||||
|
|
|
|
tensor |
|||||||||||
− xy dm |
% |
(x2%+ z2) dm |
|
−% yz dm |
|
dm |
mass element |
||||||||
|
% xz dm |
|
|
yz dm |
|
(x2%+ y2) dm |
|
|
xi |
position vector of |
|||||
|
|
|
|
|
− % |
|
% |
|
|
|
dm |
||||
− % |
|
|
|
|
|
|
|
(3.137) |
Iij |
components of I |
|||||
|
|
I12 = I12 − ma1a2 |
|
|
|
|
(3.138) |
Iij |
tensor with respect |
||||||
Parallel axis |
|
|
|
|
|
|
to centre of mass |
||||||||
|
I11 = I11 + m(a22 + a32) |
|
|
|
(3.139) |
ai,a |
position vector of |
||||||||
theorem |
|
Iij = Iij + m(|a|2δij − aiaj ) |
|
|
|
(3.140) |
|
centre of mass |
|||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
m |
mass of body |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Angular |
|
J = Iω |
|
|
|
|
|
|
|
|
(3.141) |
J |
angular momentum |
||
momentum |
|
|
|
|
|
|
|
|
|
ω |
angular velocity |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rotational |
|
1 |
|
|
1 |
|
|
|
|
|
|
T |
kinetic energy |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
kinetic energy |
|
T = 2 ω · J = 2 Iij ωiωj |
|
|
|
(3.142) |
|||||||||
|
|
|
|
|
|
||||||||||
aIii are the moments of inertia of the body. Iij |
(i = j) are its products of inertia. The integrals are over the body |
||||||||||||||
volume. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Principal axes
Principal |
I = |
I1 |
0 |
0 |
|
|
|
|
I |
principal moment of |
|||
|
|
|
|
inertia tensor |
|||||||||
moment of |
0 |
I2 |
0 |
|
|
(3.143) |
|
||||||
|
|
Ii |
principal moments of |
||||||||||
inertia tensor |
|
0 |
0 |
I3 |
|
|
|
|
|
inertia |
|||
|
|
|
|
|
|
|
J |
angular momentum |
|||||
Angular |
|
|
|
|
|
|
|
|
|
|
|||
J = (I1ω1,I2ω2,I3ω3) |
|
|
(3.144) |
ωi |
components of ω |
||||||||
momentum |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
along principal axes |
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
Rotational |
T = |
1 |
(I1ω12 + I2ω22 + I3ω32) |
|
|
(3.145) |
T |
kinetic energy |
|||||
kinetic energy |
|
|
|
||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
Moment of |
T = T (ω1,ω2,ω3) |
|
|
(3.146) |
|
|
|
||||||
inertia |
Ji = |
∂T |
(J is ellipsoid surface) |
(3.147) |
|
|
I3 |
||||||
|
|
||||||||||||
ellipsoida |
|
|
|||||||||||
|
|
|
|
|
|||||||||
∂ωi |
|
|
|
||||||||||
Perpendicular |
|
|
|
|
≥ I3 |
generally |
|
|
|
I1 |
|
I2 |
|
I1 + I2 |
|
|
(3.148) |
|
|
|
|||||||
axis theorem |
|
to 3-axis |
|
|
|
||||||||
|
|
|
"= I3 |
flat lamina |
|
|
|
lamina |
|||||
|
I1 = I2 = I3 |
asymmetric top |
|
|
|
||||||||
|
|
|
|
|
|
||||||||
Symmetries |
I1 = I2 = I3 |
symmetric top |
|
(3.149) |
|
|
|
||||||
|
I1 = I2 = I3 |
spherical top |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aThe ellipsoid is defined by the surface of constant T .
3.5 Rigid body dynamics |
75 |
|
|
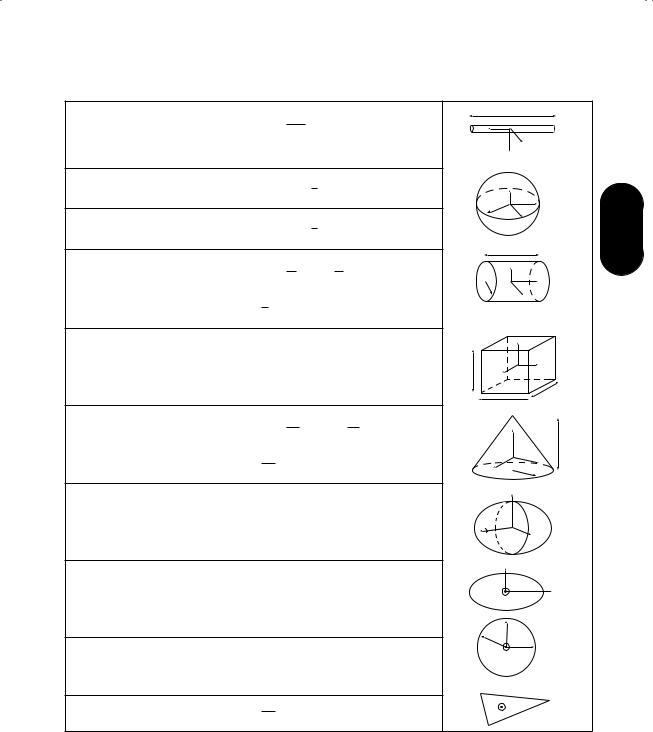
Moments of inertiaa
|
I1 = I2 = |
ml2 |
|
|
|
|
(3.150) |
|
|
|
|
l |
|
Thin rod, length l |
12 |
|
|
|
|
|
|
I3 |
|
|
I2 |
||
|
I3 0 |
|
|
|
|
|
(3.151) |
|
|
I1 |
|||
|
|
|
|
|
|
|
|
|
|
||||
Solid sphere, radius r |
|
|
2 |
2 |
|
|
|
|
|
|
|
I1 |
|
I1 = I2 = I3 = 5 mr |
|
|
|
(3.152) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
r |
|
I3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Spherical shell, radius r |
|
|
2 |
2 |
|
|
|
|
|
|
|
I2 |
3 |
I1 = I2 = I3 = 3 mr |
|
|
(3.153) |
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
l |
|||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
Solid cylinder, radius r, |
I1 = I2 = |
4 r2 + l3 |
|
(3.154) |
|
r |
|
I1 |
I3 |
||||
length l |
I3 = 1 mr2 |
|
|
|
|
(3.155) |
|
|
|
|
I2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 = m(b2 + c2)/12 |
|
|
|
|
|
|
|
I1 |
||||
|
|
|
(3.156) |
|
|
|
|
|
|
||||
Solid cuboid, sides a,b,c |
2 |
2 |
)/12 |
|
|
(3.157) |
|
|
|
|
|
I3 |
|
I2 = m(c |
+ a |
|
|
a |
|
I2 |
|
|
|||||
|
I3 = m(a2 + b2)/12 |
|
|
(3.158) |
|
|
|
||||||
|
|
|
|
|
|
|
|
b |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
h2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||
Solid circular cone, base |
I1 = I2 = |
20 m r2 + |
4 |
(3.159) |
|
|
|
I3 |
h |
||||
radius r, height hb |
3 |
|
|
|
|
|
|
|
|
|
I2 |
||
|
I3 = 10 mr2 |
|
|
|
|
(3.160) |
|
|
|
|
I1 |
r |
|
Solid ellipsoid, semi-axes |
I1 = m(b2 + c2)/5 |
|
|
|
(3.161) |
|
|
|
|
I3 |
|||
I2 = m(c2 + a2)/5 |
|
|
|
(3.162) |
|
|
a |
|
c |
b I2 |
|||
a,b,c |
I3 = m(a2 + b2)/5 |
|
|
|
(3.163) |
|
|
I1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
I1 = mb2/4 |
|
|
|
|
(3.164) |
|
|
|
|
I2 |
I1 |
|
Elliptical lamina, |
|
|
|
|
|
|
|
b |
|||||
I2 = ma2/4 |
|
|
|
|
(3.165) |
|
|
|
|
I3 |
a |
||
semi-axes a,b |
I3 = m(a2 + b2)/4 |
|
|
|
(3.166) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
I2 |
|
Disk, radius r |
I1 = I2 = mr2/4 |
|
|
|
(3.167) |
|
|
r |
|
I3 |
I1 |
||
I3 = mr2/2 |
|
|
|
|
(3.168) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
I3 = m (a2 + b2 + c2) |
|
|
|
|
|
|
a |
|
||||
Triangular platec |
|
(3.169) |
|
b |
I3 |
c |
|||||||
|
36 |
|
|
|
|
|
|
|
|
|
|
||
aWith respect to principal axes for bodies of mass m and uniform density. The radius of gyration is defined as k = (I/m)1/2.
bOrigin of axes is at the centre of mass (h/4 above the base).
cAround an axis through the centre of mass and perpendicular to the plane of the plate.
76 Dynamics and mechanics
Centres of mass
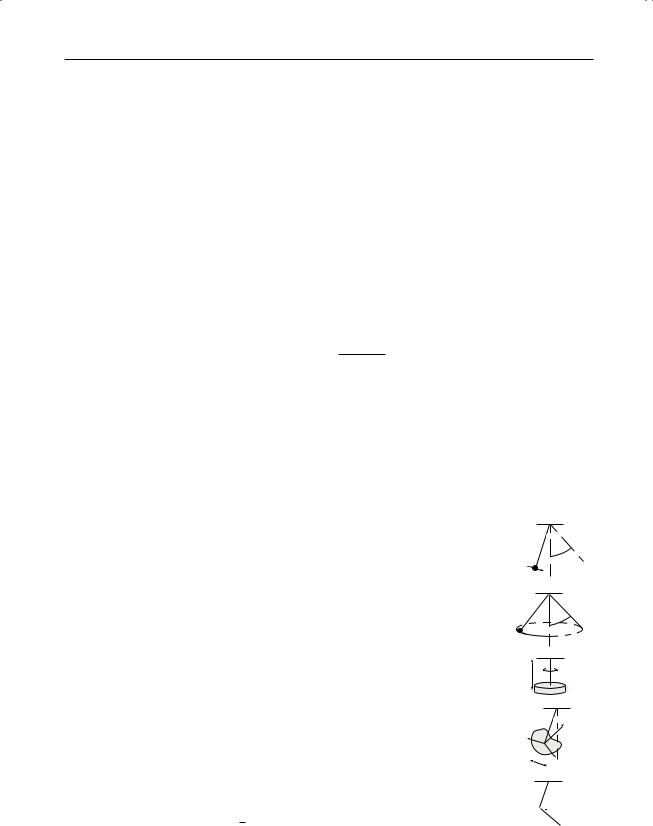
Solid hemisphere, radius r |
d = 3r/8 |
from sphere centre |
(3.170) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Hemispherical shell, radius r |
d = r/2 |
|
from sphere centre |
(3.171) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sector of disk, radius r, angle |
2 |
|
sinθ |
|
|
||||||||
2θ |
d = |
|
|
|
r |
|
|
|
|
|
from disk centre |
(3.172) |
|
3 |
|
θ |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Arc of circle, radius r, angle |
|
|
sinθ |
|
from circle centre |
(3.173) |
|||||||
2θ |
d = r |
|
|
|
|
||||||||
|
θ |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Arbitrary triangular lamina, |
d = h/3 |
|
perpendicular from base |
(3.174) |
|||||||||
height ha |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Solid cone or pyramid, height |
d = h/4 |
|
perpendicular from base |
(3.175) |
|||||||||
h |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Spherical cap, height h, |
solid: |
|
d = |
3 |
(2r − h)2 |
from sphere centre |
(3.176) |
||||||
|
|
||||||||||||
sphere radius r |
shell: |
|
|
|
|
4 3r − h |
|
(3.177) |
|||||
|
|
d = r − h/2 from sphere centre |
|||||||||||
Semi-elliptical lamina, |
d = |
4h |
|
from base |
|
(3.178) |
|||||||
height h |
|
|
|
||||||||||
3π |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ah is the perpendicular distance between the base and apex of the triangle.
Pendulums
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
period |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
gravitational acceleration |
|
Simple |
P = 2π |
l |
|
|
|
θ02 |
+ · · · |
|
|||||||||||
1 + |
(3.179) |
l |
length |
||||||||||||||||
pendulum |
|
|
|
|
|
|
|||||||||||||
g |
16 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
θ0 |
maximum angular |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
displacement |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Conical |
P = 2π |
l cosα |
1/2 |
|
|
|
|
|
|
||||||||||
pendulum |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.180) |
α |
cone half-angle |
|||
|
|
|
g |
|
|
|
|
|
|
|
|||||||||
Torsional |
|
|
lI0 |
|
1/2 |
|
|
|
|
|
|
I0 |
moment of inertia of bob |
||||||
|
|
|
|
|
|
|
|
|
|
|
C |
torsional rigidity of wire |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
penduluma |
P = 2π C |
|
|
|
|
|
|
|
(3.181) |
||||||||||
|
|
|
|
|
|
|
|
(see page 81) |
|||||||||||
|
P 2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
distance of rotation axis |
|
|
|
1 |
|
|
(ma2 + I1 cos2 γ1 |
|
|
from centre of mass |
|||||||||||
|
|
|
m mass of body |
||||||||||||||||
Compound |
mga |
|
|||||||||||||||||
pendulumb |
+ I2 cos2 γ2 + I3 cos2 γ3) |
1/2 |
|
Ii |
principal moments of |
||||||||||||||
|
|
(3.182) |
|
inertia |
|||||||||||||||
|
|
γi |
angles between rotation |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
axis and principal axes |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Equal |
|
|
|
|
|
|
|
l |
|
|
|
|
|
1/2 |
|
|
|
|
|
double |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
P 2π (2 ± √ |
2)g |
|
|
(3.183) |
|
|
|||||||||||||
pendulumc |
|
|
|
|
|||||||||||||||
l  θ0
θ0
m
l  α
α
m

l I0
I1 |
a |
I3 |
|
|
I2 |
l
 m
m
l 
 m
m
aAssuming the bob is supported parallel to a principal rotation axis. bI.e., an arbitrary triaxial rigid body.
cFor very small oscillations (two eigenmodes).
3.5 Rigid body dynamics |
77 |
|
|
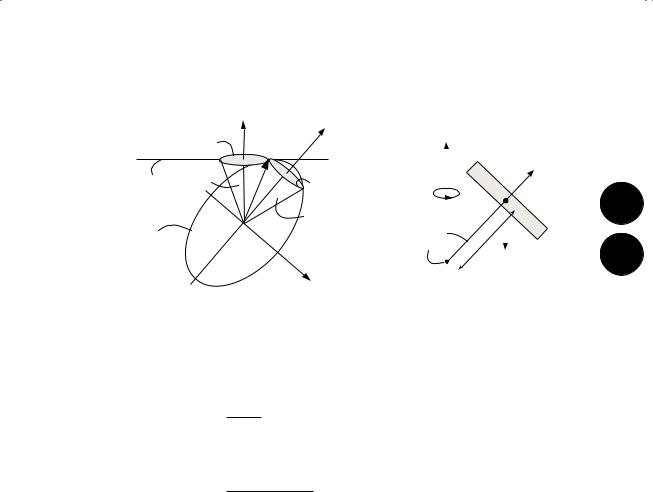
Tops and gyroscopes
|
|
|
|
|
|
J |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
herpolhode |
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
space |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J 3 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
invariable |
cone |
|
|
|
|
|
|
|
|
|
|
polhode |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ωp |
|
|
|
|
|
|
|
|
|||
|
plane |
|
|
|
|
|
|
|
|
|
|
|
body |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||
|
moment |
|
|
|
|
|
|
|
|
|
|
|
cone |
|
|
|
|
|
θ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
of inertia |
|
|
|
|
|
|
|
|
|
|
|
|
|
support point |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
||||
|
ellipsoid |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
mg |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
prolate symmetric top |
|
|
|
gyroscope |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
G1 = I1ω˙1 + (I3 − I2)ω2ω3 |
(3.184) |
G |
i |
|
rotation) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
external couple (= 0 for free |
|
|
||||
Euler’s equationsa |
G2 = I2ω˙2 + (I1 − I3)ω3ω1 |
(3.185) |
Ii |
|
|
principal moments of inertia |
|
|
||||||||||||||||
|
|
G3 = I3ω˙3 + (I2 − I1)ω1ω2 |
(3.186) |
ωi |
|
angular velocity of rotation |
|
|
||||||||||||||||
Free symmetric |
Ωb = |
|
I1 − I3 |
ω3 |
|
|
|
|
(3.187) |
Ωb |
|
body frequency |
|
|
||||||||||
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
Ωs |
|
space frequency |
|
|
|||||||
topb (I3 < I2 = I1) |
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ωs = |
|
|
|
|
|
|
|
|
|
|
(3.188) |
J |
|
|
total angular momentum |
|
|
|||||||
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Free asymmetric |
|
|
|
(I1 |
− |
I3)(I2 |
− |
I3) |
|
|
|
|
|
|
|
|
|
|
||||||
top |
c |
Ωb2 = |
|
|
I1I2 |
|
|
ω32 |
(3.189) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ωp |
|
precession angular velocity |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Ω2 I |
cosθ |
− |
ΩpJ3 + mga = 0 |
(3.190) |
θ |
|
|
angle from vertical |
|
|
||||||||||||
Steady gyroscopic |
p 1 |
|
|
|
|
|
|
|
|
(slow) |
|
J3 |
|
angular momentum around |
|
|
||||||||
|
|
|
|
|
|
Mga/J3 |
|
|
|
|
|
|
|
symmetry axis |
|
|
||||||||
precession |
Ωp "J3/(I1 cosθ) |
|
(fast) |
(3.191) |
m |
|
|
mass |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
gravitational acceleration |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
distance of centre of mass |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Gyroscopic |
J32 |
≥ |
4I1mgacosθ |
|
|
|
(3.192) |
|
|
|
from support point |
|
|
|||||||||||
stability |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
moment of inertia about |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
support point |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gyroscopic limit |
J32 I1mga |
|
|
|
|
|
(3.193) |
|
|
|
|
|
|
|
|
|
||||||||
(“sleeping top”) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Nutation rate |
Ωn = J3/I1 |
|
|
|
|
|
|
(3.194) |
Ωn |
|
nutation angular velocity |
|
|
|||||||||||
Gyroscope |
Ωp = |
mga |
(1 − cosΩnt) |
(3.195) |
t |
|
|
time |
|
|
|
|||||||||||||
released from rest |
|
J3 |
|
|
|
|
|
|||||||||||||||||
aComponents are with respect to the principal axes, rotating with the body.
bThe body frequency is the angular velocity (with respect to principal axes) of ω around the 3-axis. The space frequency is the angular velocity of the 3-axis around J , i.e., the angular velocity at which the body cone moves around the space cone.
cJ close to 3-axis. If Ω2b < 0, the body tumbles.

78 Dynamics and mechanics
3.6 Oscillating systems Free oscillations
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
oscillating variable |
Di erential |
|
d2x |
|
|
|
|
dx |
|
|
|
|
|
t |
time |
||
equation |
|
|
|
+ 2γ |
|
|
+ ω02x = 0 |
(3.196) |
γ |
damping factor (per unit |
||||||
|
dt2 |
|
|
|||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
mass) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω0 |
undamped angular frequency |
Underdamped |
x = Ae−γt cos(ωt+ φ) |
(3.197) |
A |
amplitude constant |
||||||||||||
solution (γ < ω0) |
where |
ω = (ω02 − γ2)1/2 |
(3.198) |
φ |
phase constant |
|||||||||||
ω |
angular eigenfrequency |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Critically damped |
x = e−γt(A1 + A2t) |
|
(3.199) |
Ai |
amplitude constants |
|||||||||||
solution (γ = ω0) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Overdamped |
x = e−γt(A1eqt + A2e−qt) |
(3.200) |
|
|
||||||||||||
solution (γ > ω0) |
where |
q = (γ2 − ω02)1/2 |
(3.201) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Logarithmic |
∆ = ln |
|
an |
= |
|
2πγ |
|
(3.202) |
∆ |
logarithmic decrement |
||||||
decrementa |
an+1 |
|
ω |
|
an |
nth displacement maximum |
||||||||||
Quality factor |
Q = |
|
ω0 |
|
π |
|
if Q 1 |
(3.203) |
Q |
quality factor |
||||||
|
2γ |
∆ |
||||||||||||||
aThe decrement is usually the ratio of successive displacement maxima but is sometimes taken as the ratio of successive displacement extrema, reducing ∆ by a factor of 2. Logarithms are sometimes taken to base 10, introducing a further factor of log10 e.
Forced oscillations
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
oscillating variable |
Di erential |
|
d2x |
|
|
|
|
|
dx |
|
|
|
|
|
t |
time |
|||
equation |
|
|
|
+ 2γ |
|
|
|
+ ω02x = F0eiωf t |
(3.204) |
|
|
|||||||
|
dt2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
γ |
damping factor (per unit |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mass) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
x = Aei(ωf t−φ), |
|
where |
|
(3.205) |
ω0 |
undamped angular frequency |
|||||||||||
Steady- |
A = F0[(ω2 |
− |
ω2)2 + (2γωf )2]−1/2 |
(3.206) |
F0 |
force amplitude (per unit |
||||||||||||
|
|
|
|
|
|
0 |
|
f |
|
|
|
mass) |
||||||
state |
|
|
|
|
|
F0/(2ω0) |
(γ ωf ) |
(3.207) |
ωf |
forcing angular frequency |
||||||||
solutiona |
[(ω0 |
− |
ωf )2 + γ2]1/2 |
A |
amplitude |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
tanφ = |
|
|
2γωf |
|
|
|
(3.208) |
φ |
phase lag of response behind |
||||||||
|
ω02 − ωf2 |
|
|
|
driving force |
|||||||||||||
Amplitude |
2 |
2 |
− |
|
|
2 |
|
|
|
|
ωar |
amplitude resonant forcing |
||||||
resonanceb |
ωar = ω0 |
2γ |
|
|
|
|
(3.209) |
|
angular frequency |
|||||||||
Velocity |
ωvr = ω0 |
|
|
|
|
|
|
|
|
|
(3.210) |
ωvr |
velocity resonant forcing |
|||||
resonancec |
|
|
|
|
|
|
|
|
|
|
angular frequency |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Quality |
Q = |
|
ω0 |
|
|
|
|
|
|
|
|
|
|
(3.211) |
Q |
quality factor |
||
factor |
|
2γ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||||||
Impedance |
Z = 2γ + i |
ωf2 − ω02 |
|
(3.212) |
Z |
impedance (per unit mass) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ωf |
|
|
|
|
|
|
|
aExcluding the free oscillation terms.
bForcing frequency for maximum displacement.
cForcing frequency for maximum velocity. Note φ = π/2 at this frequency.