


Chapter 3 Dynamics and mechanics
3
3.1Introduction
Unusually in physics, there is no pithy phrase that sums up the study of dynamics (the way in which forces produce motion), kinematics (the motion of matter), mechanics (the study of the forces and the motion they produce), and statics (the way forces combine to produce equilibrium). We will take the phrase dynamics and mechanics to encompass all the above, although it clearly does not!
To some extent this is because the equations governing the motion of matter include some of our oldest insights into the physical world and are consequentially steeped in tradition. One of the more delightful, or for some annoying, facets of this is the occasional use of arcane vocabulary in the description of motion. The epitome must be what Goldstein1 calls “the jabberwockian sounding statement” the polhode rolls without slipping on the herpolhode lying in the invariable plane, describing “Poinsot’s construction” – a method of visualising the free motion of a spinning rigid body. Despite this, dynamics and mechanics, including fluid mechanics, is arguably the most practically applicable of all the branches of physics.
Moreover, and in common with electromagnetism, the study of dynamics and mechanics has spawned a good deal of mathematical apparatus that has found uses in other fields. Most notably, the ideas behind the generalised dynamics of Lagrange and Hamilton lie behind much of quantum mechanics.
1H. Goldstein, Classical Mechanics, 2nd ed., 1980, Addison-Wesley.
64 Dynamics and mechanics
3.2 Frames of reference Galilean transformations
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
r,r |
position in frames S |
m |
|
Time and |
r = r + vt |
|
|
|
|
(3.1) |
|
and S |
S |
|
positiona |
t = t |
|
|
|
|
(3.2) |
v |
velocity of S in S |
r |
r |
|
|
|
|
|
|
|
t,t |
time in S and S |
|
|
|
|
|
|
|
|
|
vt |
|
||
Velocity |
u = u + v |
|
|
|
|
(3.3) |
u,u |
velocity in frames S |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
and S |
|
|
|
p = p + mv |
|
|
|
|
|
p,p |
particle momentum |
|
|
Momentum |
|
|
|
|
(3.4) |
|
in frames S and S |
|
|
|
|
|
|
|
|
|
|
m |
particle mass |
|
|
|
|
|
|
|
|
|
|
|
|
|
Angular |
J = J + mr ×v + v×p t |
|
(3.5) |
J ,J |
angular momentum |
|
|
|||
momentum |
|
|
in frames S and S |
|
|
|||||
Kinetic |
T = T + mu · v + |
1 |
mv |
2 |
(3.6) |
T ,T |
kinetic energy in |
|
|
|
energy |
|
2 |
|
|
frames S and S |
|
|
|||
aFrames coincide at t = 0.
Lorentz (spacetime) transformationsa
|
|
|
|
v2 |
|
−1/2 |
|
γ |
Lorentz factor |
|
|||
Lorentz factor |
|
(3.7) |
c |
speed of light |
in |
|
|||||||
γ = 1 − c2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
v |
velocity of S |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Time and position |
|
|
|
|
|
|
|
|
|
|
|
||
x = γ(x + vt ); |
x = γ(x |
− |
vt) |
(3.8) |
x,x |
x-position in frames |
|||||||
y = y ; |
y = y |
|
|
|
(3.9) |
||||||||
|
|
|
|
|
S and S (similarly |
||||||||
z = z ; |
z = z |
|
|
|
|
(3.10) |
t,t |
for y and z) |
|
|
|||
t = γ t + |
v |
x !; t = γ t− |
v |
x! |
|
time in frames S and |
|||||||
(3.11) |
|
S |
|
|
|||||||||
c2 |
c2 |
|
|
|
|||||||||
Di erential |
dX = (cdt,− dx,− dy,− dz) |
|
X |
spacetime four-vector |
|||||||||
four-vectorb |
(3.12) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aFor frames S and S coincident at t = 0 in relative motion along x. See page 141 for the transformations of electromagnetic quantities.
bCovariant components, using the (1,−1,−1,−1) signature.
S S
 v
v
x x
Velocity transformationsa
Velocity |
|
|
|
|
|
|
|
|
γ |
Lorentz factor |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= [1 − (v/c)2]−1/2 |
|
|
|
|
||
ux = |
ux + v |
; |
|
|
ux |
= |
ux − v |
|
(3.13) |
|
|
|
|
|
|
1 + uxv/c2 |
|
|
|
|
velocity of S in S |
|
|
|
|
||||||
|
|
|
|
|
|
1 − uxv/c2 |
|
|
v |
|
S |
||||
|
uy |
|
|
|
u |
|
uy |
|
|
c |
speed of light |
S |
|||
uy = |
|
|
|
; |
= |
|
|
(3.14) |
ui,ui |
particle velocity |
|
|
|
u |
|
|
2 |
|
2 |
|
|
|
|
||||||||
|
|
|
|
y |
|
|
|
|
|
|
|
||||
|
γ(1 + uxv/c |
) |
|
|
|
γ(1 − uxv/c |
) |
|
|
components in |
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|||||||
uz = |
uz |
|
|
; |
uz |
= |
uz |
|
(3.15) |
|
frames S and S |
|
|
|
x x |
γ(1 + uxv/c2) |
γ(1 − uxv/c2) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aFor frames S and S coincident at t = 0 in relative motion along x.
3.2 Frames of reference |
65 |
|
|
Momentum and energy transformationsa
Momentum and energy |
|
|
|
|
|
|
|
|
γ |
Lorentz factor |
|||||||||||
|
|
|
|
|
|
|
|
|
= [1 − (v/c)2]−1/2 |
||||||||||||
p |
x |
= |
γ(p |
|
|
|
|
/c2); |
|
= γ(p |
x |
− |
vE/c2) |
(3.16) |
v |
velocity of S in S |
|||||
|
|
|
|
+ vE |
p |
|
|
||||||||||||||
py = py; |
x |
|
|
|
|
x |
|
|
|
|
(3.17) |
c |
speed of light |
||||||||
|
|
|
|
|
|
|
py = py |
|
|
|
|
|
px,px |
x components of |
|||||||
pz = pz; |
|
|
|
|
|
|
|
pz = pz |
|
|
|
|
|
(3.18) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
momentum in S and |
||||||||
E = γ(E |
+ vp |
); |
|
|
E = γ(E |
− |
vpx) |
(3.19) |
E,E |
S (sim. for y and z) |
|||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
energy in S and S |
|||
|
E2 |
− |
p2c2 = E 2 |
− |
p 2c2 = m2c4 |
|
|
|
|
|
(3.20) |
m0 |
(rest) mass |
||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
p |
total momentum in S |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
momentum |
|
Four-vector |
b |
P = (E/c,−px,−py,−pz) |
(3.21) |
||||||||||||||||||
|
|
|
four-vector |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aFor frames S and S coincident at t = 0 in relative motion along x. bCovariant components, using the (1,−1,−1,−1) signature.
S S
 v
v
x x 3
Propagation of lighta
Doppler |
|
ν |
|
|
|
v |
|
|
ν frequency received in S |
||||||
|
|
|
|
|
(3.22) |
α |
arrival angle in S |
|
|||||||
e ect |
|
ν = γ |
1 + c cosα! |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
frequency emitted in S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ |
Lorentz factor |
|
|
|
|
|
|
cosθ + v/c |
|
|
|
|
||||||
|
cosθ = |
|
|
|
(3.23) |
|
= [1 − (v/c)2]−1/2 |
|
|||||||
|
1 + (v/c)cosθ |
|
|
|
|||||||||||
Aberrationb |
|
|
|
|
|
v |
velocity of S in S |
|
|||||||
|
cosθ = |
|
cosθ − v/c |
|
|
(3.24) |
c |
speed of light |
|
||||||
|
|
|
|
θ,θ |
emission angle of light |
|
|||||||||
|
|
|
|
1 − (v/c)cosθ |
|
|
|
in S and S |
|
||||||
Relativistic |
P (θ) = |
|
|
|
|
|
sinθ |
|
(3.25) |
P (θ) angular distribution of |
|||||
beamingc |
2γ |
2 |
[1 − (v/c)cosθ] |
2 |
|
photons in S |
|
||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
aFor frames S and S coincident at t = 0 in relative motion along x.
bLight travelling in the opposite sense has a propagation angle of π + θ radians%.
cAngular distribution of photons from a source, isotropic and stationary in S . 0π P (θ) dθ = 1.
Sy c
α
x
Sy Sy
v
 θ c x x
θ c x x
Four-vectorsa
Covariant and |
x0 |
= x |
0 |
x1 = −x |
1 |
|
|
|
|
xi |
covariant vector |
||
|
|
|
|
|
|
|
|
||||||
contravariant |
|
|
|
|
|
|
|
components |
|||||
components |
x2 |
= −x2 |
x3 = −x3 |
|
|
|
(3.26) |
xi |
contravariant components |
||||
Scalar product |
xiyi = x0y0 + x1y1 + x2y2 + x3y3 |
|
(3.27) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
xi,x i four-vector components in |
|
Lorentz transformations |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
frames S and S |
||||
x0 |
= γ[x 0 + (v/c)x 1 |
]; |
|
x 0 |
= γ[x0 − (v/c)x1] |
(3.28) |
γ |
Lorentz factor |
|||||
x1 |
= γ[x 1 + (v/c)x 0 |
]; |
|
x 1 |
= γ[x1 |
− |
(v/c)x0 |
] |
(3.29) |
|
= [1 − (v/c)2]−1/2 |
||
x2 |
= x 2; |
|
|
|
x 3 |
= x3 |
|
|
|
(3.30) |
v |
velocity of S in S |
|
|
|
|
|
|
|
|
c |
speed of light |
|||||
aFor frames S and S , coincident at t = 0 in relative motion along the (1) direction. Note that the (1,−1,−1,−1) signature used here is common in special relativity, whereas (−1,1,1,1) is often used in connection with general relativity (page 67).
66 |
Dynamics and mechanics |
|
|
Rotating frames
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
any vector |
Vector trans- |
|
dA |
|
|
|
|
dA |
|
|
|
|
|
|
S |
stationary frame |
||||
|
= |
|
|
+ ω |
|
A |
(3.31) |
S |
rotating frame |
||||||||||
|
dt |
|
|
dt |
|
|
|
||||||||||||
formation |
|
S |
|
S |
× |
|
|
ω |
angular velocity |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
of S in S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
˙v,˙v |
accelerations in S |
Acceleration |
˙v = ˙v + 2ω×v + ω×(ω×r ) |
(3.32) |
|
and S |
|||||||||||||||
v |
velocity in S |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
position in S |
Coriolis force |
F |
= |
|
2mω |
|
|
v |
|
|
|
(3.33) |
F cor coriolis force |
|||||||
− |
× |
|
|
|
|
particle mass |
|||||||||||||
|
|
cor |
|
|
|
|
|
|
|
|
|
|
|
|
m |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Centrifugal |
F |
= |
− |
mω |
× |
(ω |
× |
r ) |
|
|
(3.34) |
F cen centrifugal force |
|||||||
|
|
r |
perpendicular to |
||||||||||||||||
|
cen |
|
|
|
|
|
|
|
|
|
|
|
|||||||
force |
|
|
= +mω2r |
|
|
|
|
|
(3.35) |
|
particle from |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rotation axis |
|
|
mx¨ = Fx + 2mωe(y˙sinλ− ˙z cosλ) |
|
Fi |
nongravitational |
|||||||||||||||
Motion |
(3.36) |
|
force |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
latitude |
||
relative to |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
my¨ = Fy − 2mωex˙ sinλ |
|
|
(3.37) |
y |
northerly axis |
||||||||||||||
Earth |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
local vertical axis |
|
m¨z = Fz − mg + 2mωex˙ cosλ |
(3.38) |
x |
easterly axis |
|||||||||||||||
Foucault’s |
Ωf = −ωe sinλ |
|
|
|
|
|
(3.39) |
Ωf |
pendulum’s rate |
||||||||||
|
|
|
|
|
|
of turn |
|||||||||||||
penduluma |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωe |
Earth’s spin rate |
aThe sign is such as to make the rotation clockwise in the northern hemisphere.
ω
F cen
r m
r
ωe
y z
 x
x
 λ
λ
3.3 Gravitation
Newtonian gravitation
|
|
|
|
|
|
|
|
|
|
m1,2 masses |
|
|
Newton’s law of |
F 1 = Gm1m2 rˆ12 |
|
|
(3.40) |
F 1 |
force on m1 (= −F 2) |
||||||
gravitation |
|
|
r2 |
|
|
|
|
|
r12 |
vector from m1 to m2 |
||
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
unit vector |
|
|
g = − φ |
|
|
|
|
|
(3.41) |
G |
constant of gravitation |
|||
Newtonian field |
|
|
|
|
|
g |
gravitational field strength |
|||||
equationsa |
2 |
φ = − · g = 4πGρ |
|
φ |
gravitational potential |
|||||||
|
|
(3.42) |
ρ |
mass density |
|
|||||||
|
|
|
|
GM |
|
|
|
|
r |
vector from sphere centre |
||
Fields from an |
g(r) = |
− r2 |
rˆ |
|
(r > a) |
(3.43) |
M |
mass of sphere |
||||
isolated |
|
|
|
GMr rˆ |
(r < a) |
|
a |
radius of sphere |
||||
uniform sphere, |
|
|
|
|
a3 |
|
|
|
|
|
|
|
|
|
− GM |
|
|
|
|
|
|
|
|||
mass M, r from |
|
|
|
|
|
|
|
(r > a) |
|
|
a M |
|
the centre |
φ(r) = |
− r |
|
|
|
(3.44) |
|
r |
||||
|
|
|
GM (r2 |
|
3a2) (r < a) |
|
|
|
|
|||
|
|
|
|
2a |
3 |
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
aThe gravitational force on a mass m is mg.
3.3 Gravitation |
67 |
|
|
General relativitya
Line element |
ds2 = gµν dxµ dxν = − dτ2 |
|
|
|
(3.45) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Christo el |
Γαβγ = |
|
gαδ(gδβ,γ |
|
+ gδγ,β − gβγ,δ) |
|
(3.46) |
|||||||||||||||||||
2 |
|
|
||||||||||||||||||||||||
symbols and |
φ;γ = φ,γ ≡ ∂φ/∂xγ |
|
|
|
|
(3.47) |
||||||||||||||||||||
covariant |
|
α |
|
|
|
α |
|
|
α |
|
|
β |
|
|
|
|
(3.48) |
|||||||||
di erentiation |
A;γ |
= A,γ |
+ Γ βγA |
|
|
|
|
|
|
|
|
|||||||||||||||
Bα;γ = Bα,γ − ΓβαγBβ |
|
|
|
|
(3.49) |
|||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Rαβγδ = ΓαµγΓµβδ − ΓαµδΓµβγ |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ Γαβδ,γ − Γαβγ,δ |
|
(3.50) |
||||||||
Riemann tensor |
Bµ;α;β − Bµ;β;α = RγµαβBγ |
|
|
|
(3.51) |
|||||||||||||||||||||
|
Rαβγδ = −Rαβδγ ; |
|
|
Rβαγδ = −Rαβγδ |
|
(3.52) |
||||||||||||||||||||
|
Rαβγδ + Rαδβγ + Rαγδβ = 0 |
|
|
|
(3.53) |
|||||||||||||||||||||
|
|
Dvµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Geodesic |
|
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.54) |
|||||||
|
Dλ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
equation |
|
|
|
|
|
|
|
|
|
DAµ |
|
dAµ |
|
|
|
|
|
|
||||||||
|
where |
|
|
|
|
|
|
≡ |
|
|
|
|
+ Γµαβ Aαvβ |
|
(3.55) |
|||||||||||
|
|
|
|
Dλ |
|
|
|
dλ |
|
|||||||||||||||||
Geodesic |
|
D2ξµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
deviation |
|
|
= −Rµαβγvαξβvγ |
|
|
|
|
(3.56) |
||||||||||||||||||
|
Dλ2 |
|
|
|
|
|||||||||||||||||||||
Ricci tensor |
Rαβ ≡ Rσασβ = gσδRδασβ = Rβα |
|
(3.57) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Einstein tensor |
|
µν |
|
|
|
|
µν |
1 |
|
|
µν |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
G |
|
= R |
|
|
|
− 2 g |
|
|
|
|
R |
|
|
|
|
(3.58) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Einstein’s field |
Gµν = 8πT µν |
|
|
|
|
|
|
|
|
|
|
(3.59) |
||||||||||||||
equations |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Perfect fluid |
T µν = (p+ ρ)uµuν + pgµν |
|
|
|
(3.60) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2M |
|
|
|
|
2M |
|
−1 |
|
|||||
Schwarzschild |
|
|
2 |
= − 1 − |
|
|
|
|
|
2 |
|
1 − |
|
|
|
2 |
||||||||||
solution |
ds |
|
r |
|
|
|
dt |
+ |
r |
|
dr |
|
||||||||||||||
(exterior) |
|
|
|
|
|
+ r2(dθ2 + sin2 θ dφ2) |
|
(3.61) |
||||||||||||||||||
Kerr solution (outside a spinning black hole)
ds2 = |
− |
∆ − a2 sin2 θ |
dt2 |
− |
2a |
2Mrsin2 θ |
dt dφ |
|
|||||
|
|
|
|
||||||||||
|
|
2 |
|
|
|
2 |
|
|
|
|
|
||
+ |
(r2 + a2)2 −2a2∆sin2 θ |
sin2 θdφ2 + |
2 |
dr2 |
+ 2 dθ2 |
(3.62) |
|||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
∆ |
|
|
||
ds |
invariant interval |
|
|
dτ |
proper time interval |
|
|
gµν |
metric tensor |
|
|
dxµ |
di erential of xµ |
|
|
Γα |
Christo el symbols |
|
|
βγ |
|
|
|
,α |
partial di . w.r.t. xα |
|
|
;α |
covariant di . w.r.t. xα |
|
|
3 |
|||
φ |
scalar |
||
Aα |
contravariant vector |
||
Bα |
covariant vector |
|
|
|
|||
Rα |
Riemann tensor |
|
|
βγδ |
|
|
vµ |
tangent vector |
|
(= dxµ/dλ) |
λa ne parameter (e.g., τ for material particles)
ξµ |
geodesic deviation |
Rαβ |
Ricci tensor |
Gµν |
Einstein tensor |
RRicci scalar (= gµν Rµν )
T µν |
stress-energy tensor |
ppressure (in rest frame)
ρdensity (in rest frame)
uν |
fluid four-velocity |
Mspherically symmetric mass (see page 183)
(r,θ,φ) spherical polar coords.
ttime
Jangular momentum (along z)
a≡ J/M
∆≡ r2 − 2Mr + a2
2 |
≡ r2 + a2 cos2 θ |
a |
General relativity |
conventionally uses the ( |
− |
1,1,1,1) metric signature and “geometrized units” in which G = 1 and |
||||||||
|
||||||||||||
|
|
× |
10− |
28 |
|
|
|
|
||||
c = 1. Thus, 1kg = 7.425 |
|
m etc. Contravariant indices are written as superscripts and covariant indices as |
||||||||||
|
|
|
|
2 |
means (ds) |
2 |
etc. |
|||||
subscripts. Note also that ds |
|
|
||||||||||

68 Dynamics and mechanics
3.4 Particle motion Dynamics definitionsa
|
|
|
|
|
|
F |
force |
|
Newtonian force |
F = m¨r = p˙ |
(3.63) |
m |
mass of particle |
||||
|
|
|
|
|
|
r |
particle position vector |
|
|
|
|
|
|
|
|
|
|
Momentum |
p = m˙r |
(3.64) |
p |
momentum |
||||
|
|
|
|
|
|
|
|
|
Kinetic energy |
T = |
1 |
mv2 |
(3.65) |
T |
kinetic energy |
||
|
|
|
|
|||||
|
2 |
|
|
v |
particle velocity |
|||
|
|
|
|
|
|
|||
Angular momentum |
J = r×p |
(3.66) |
J |
angular momentum |
||||
|
|
|
|
|
|
|||
Couple (or torque) |
G = r×F |
(3.67) |
G |
couple |
||||
|
|
|
|
|
|
|
|
|
Centre of mass |
|
|
|
N |
|
R0 |
position vector of centre of mass |
|
(ensemble of N |
|
|
|
i=1 miri |
|
mi |
mass of ith particle |
|
R0 = iN=1 mi |
(3.68) |
|||||||
particles) |
ri |
position vector of ith particle |
||||||
|
|
|
|
|
||||
aIn the Newtonian limit, v c, assuming m is constant.
Relativistic dynamicsa
|
|
|
|
v2 |
|
−1/2 |
|
γ |
Lorentz factor |
Lorentz factor |
|
|
|
(3.69) |
c |
speed of light |
|||
γ = 1 − c2 |
|
||||||||
|
|
|
|
|
|
|
|
v |
particle velocity |
|
|
|
|
|
|
|
|
p |
relativistic momentum |
Momentum |
p = γm0v |
|
|
(3.70) |
|||||
|
|
m0 |
particle (rest) mass |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Force |
F = |
dp |
|
|
|
(3.71) |
F |
force on particle |
|
dt |
|
|
t |
time |
|||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
Rest energy |
Er = m0c2 |
|
|
(3.72) |
Er |
particle rest energy |
|||
|
|
|
|
|
|||||
Kinetic energy |
T = m0c2(γ − 1) |
(3.73) |
T |
relativistic kinetic energy |
|||||
Total energy |
E = γm0c2 |
|
|
(3.74) |
|
|
|||
= (p2c2 + m02c4)1/2 |
(3.75) |
E |
total energy (= Er + T ) |
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
aIt is now common to regard mass as a Lorentz invariant property and to drop the term “rest mass.” The symbol m0 is used here to avoid confusion with the idea of “relativistic mass” (= γm0) used by some authors.
Constant acceleration
v = u+ at |
(3.76) |
u |
initial velocity |
|||||
v2 = u2 + 2as |
(3.77) |
|||||||
v |
final velocity |
|||||||
|
|
|
|
|
|
|||
s = ut+ |
1 |
at2 |
(3.78) |
t |
time |
|||
2 |
s |
distance travelled |
||||||
|
|
|
|
|||||
s = |
u+ v |
(3.79) |
a |
acceleration |
||||
|
|
t |
|
|
||||
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3.4 Particle motion |
69 |
|
|
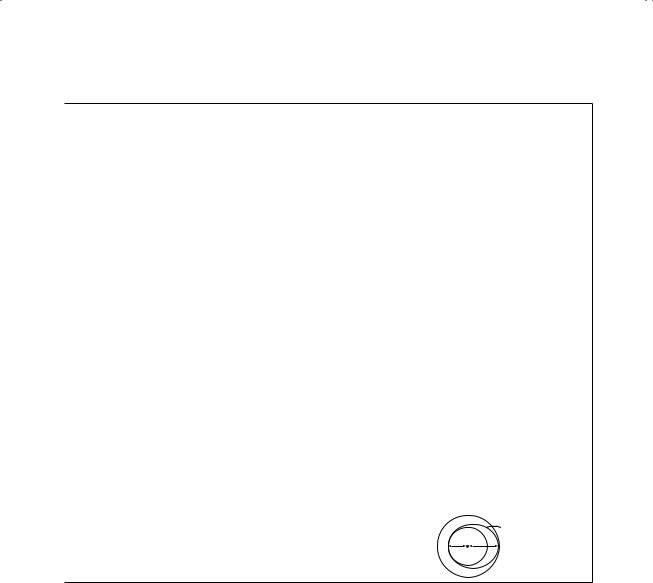
Reduced mass (of two interacting bodies)
|
|
m2 |
|
|
|
|
r |
|
m1 |
|||
|
|
|
|
|
|
|
||||||
|
|
centre |
|
|||||||||
|
|
|
of |
|
|
|
|
|
|
|||
|
|
|
mass |
|
|
|
||||||
|
|
r2 |
|
|
|
|
|
|
r1 |
|
|
|
Reduced mass |
µ = |
|
|
m1m2 |
(3.80) |
|||||||
m1 + m2 |
|
|
||||||||||
|
|
r1 = |
|
|
m2 |
(3.81) |
||||||
|
|
|
r |
|||||||||
Distances from |
m1 + m2 |
|||||||||||
centre of mass |
r2 = |
|
|
|
−m1 |
r |
(3.82) |
|||||
|
|
|
|
|
||||||||
|
|
|
|
|
m1 + m2 |
|
|
|
||||
Moment of |
I = µ|r| |
2 |
|
|
(3.83) |
|||||||
inertia |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Total angular |
J = µr×˙r |
(3.84) |
||||||||||
momentum |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Lagrangian |
L = |
1 |
µ|˙r|2 − U(|r|) |
(3.85) |
||||||||
|
|
|||||||||||
|
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
reduced mass |
3 |
mi |
interacting masses |
|
ri |
position vectors from centre of |
|
|
||
|
mass |
|
rr = r1 − r2
|r| distance between masses
Imoment of inertia
Jangular momentum
LLagrangian
Upotential energy of interaction
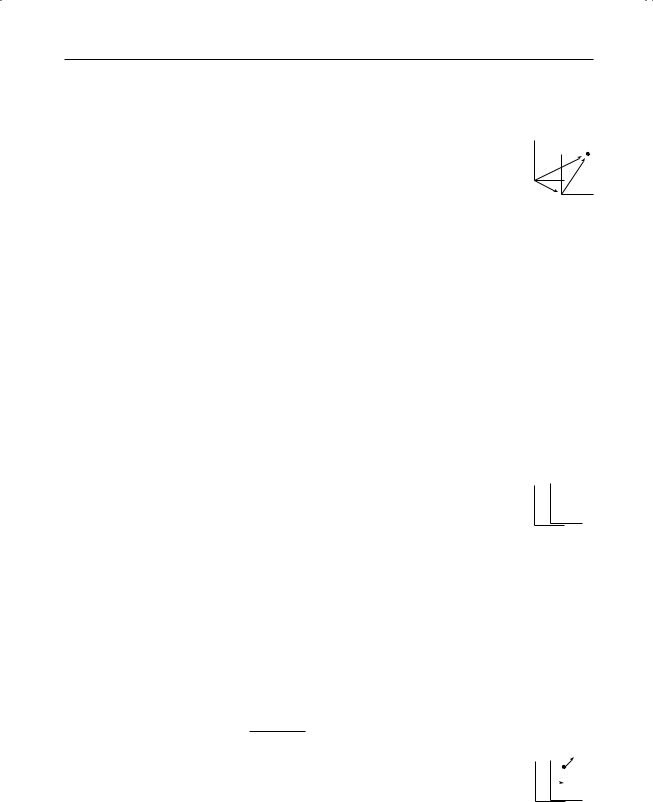
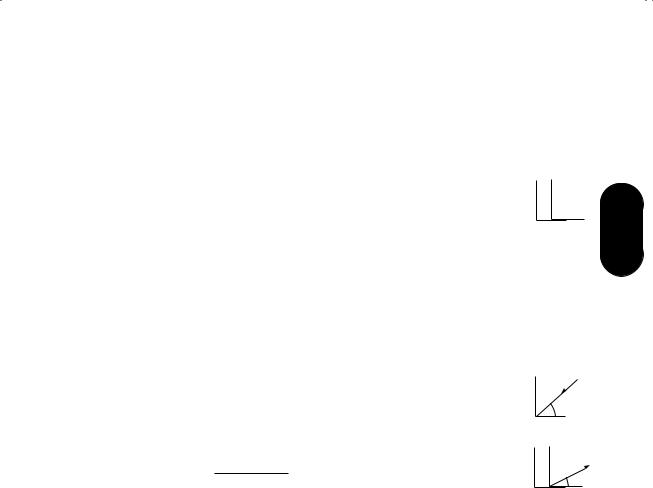
Ballisticsa
|
v = v0 cosαxˆ + (v0 sinα− gt)yˆ |
v0 |
initial velocity |
|||||||||||
|
v |
velocity at t |
||||||||||||
Velocity |
|
|
|
|
|
|
|
|
|
|
(3.86) |
α |
elevation angle |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
v |
2 |
|
2 |
− 2gy |
(3.87) |
|
acceleration |
||||||
|
|
= v0 |
g |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
gravitational |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Trajectory |
|
|
|
|
|
|
|
|
|
gx2 |
|
ˆ |
unit vector |
|
y = xtanα− 2v02 cos2 α |
(3.88) |
t |
time |
|||||||||||
|
||||||||||||||
Maximum |
h = |
|
v02 |
sin |
2 |
α |
(3.89) |
h |
maximum |
|||||
height |
|
2g |
|
|
height |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Horizontal |
|
|
|
v2 |
|
|
|
|
|
|
|
|||
|
l = |
0 |
sin2α |
(3.90) |
l |
range |
||||||||
range |
g |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aIgnoring the curvature and rotation of the Earth and frictional losses. g is assumed constant.
yˆ
v0 
α h xˆ
h xˆ
l
70 |
Dynamics and mechanics |
|
|
Rocketry
Escape |
|
vesc = |
|
GM |
|
1/2 |
|
|
|
|
|
|
|
|
|||||||
velocitya |
2 |
|
|
|
|
|
|
|
|
|
|
(3.91) |
|||||||||
|
r |
|
|
|
|
|
|
|
|
||||||||||||
Specific |
|
Isp = |
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.92) |
||
impulse |
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Exhaust |
|
|
2γRTc |
|
|
|
1/2 |
|
|
|
|
|
|
|
|
||||||
velocity (into |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u = (γ − 1)µ |
|
|
|
|
|
|
|
|
|
(3.93) |
|||||||||||
a vacuum) |
|
|
|
|
|
|
|
|
|
||||||||||||
Rocket |
|
|
|
|
|
|
|
Mi |
|
|
|
|
|
|
|
|
|
|
|
||
equation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
∆v = uln Mf ≡ ulnM |
|
|
|
(3.94) |
|||||||||||||||||
(g = 0) |
|
|
|
|
|||||||||||||||||
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Multistage |
|
ui lnMi |
|
|
|
|
|
|
|
(3.95) |
|||||||||||
rocket |
|
∆v = |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
In a constant |
∆v = ulnM − gtcosθ |
|
|
|
|
|
|
|
|||||||||||||
gravitational |
|
|
|
|
|
|
(3.96) |
||||||||||||||
field |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GM |
|
|
|
1/2 |
|
|
2r |
|
1/2 |
|
||||
|
∆vah = |
|
|
|
|
|
b |
|
|
− 1 |
|||||||||||
Hohmann |
ra |
|
ra + rb |
||||||||||||||||||
cotangential |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.97) |
|
|
|
|
|
|
|
|
|
|
|
|
1/2 |
|
|
|
|
|
|
|
1/2 |
||
|
b |
|
|
|
|
|
GM |
|
|
|
|
|
|
2r |
|
|
|||||
transfer |
|
∆vhb = |
|
|
1 |
− |
|
|
|||||||||||||
|
|
|
a |
||||||||||||||||||
|
|
rb |
|
ra + rb |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.98) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vesc |
escape velocity |
Gconstant of gravitation
Mmass of central body
rcentral body radius
Isp |
specific impulse |
ue ective exhaust velocity
gacceleration due to gravity
Rmolar gas constant
γratio of heat capacities
Tc |
combustion temperature |
µe ective molecular mass of exhaust gas
∆v |
rocket velocity increment |
Mi |
pre-burn rocket mass |
Mf |
post-burn rocket mass |
Mmass ratio
Nnumber of stages
Mi |
mass ratio for ith burn |
ui |
exhaust velocity of ith burn |
tburn time
θrocket zenith angle
∆vah |
velocity increment, a to h |
|
∆vhb |
velocity increment, h to b |
|
ra |
radius of inner orbit |
|
rb |
radius of outer orbit |
|
|
|
transfer ellipse, h |
|
a |
b |
aFrom the surface of a spherically symmetric, nonrotating body, mass M.
bTransfer between coplanar, circular orbits a and b, via ellipse h with a minimal expenditure of energy.
3.4 Particle motion |
71 |
|
|
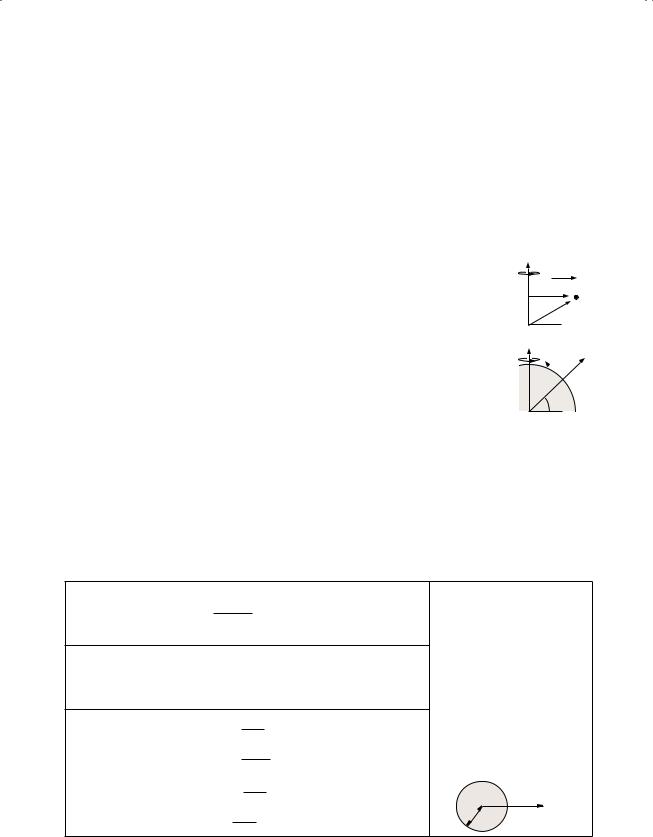
Gravitationally bound orbital motiona
Potential energy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GMm |
|
|
α |
|
|
|
|
|
|
|
|
||||||||||||||||
of interaction |
U(r) = − |
|
|
|
|
|
|
|
|
|
|
|
|
|
≡ − |
|
|
|
|
|
|
|
|
|
|
|
(3.99) |
|||||||||||||||
|
|
|
|
|
r |
|
|
r |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Total energy |
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
J2 |
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
||||||||
E = − r + 2mr2 = − 2a |
|
|
|
|
|
|
|
(3.100) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
Virial theorem |
E = U /2 = − T |
|
|
|
|
|
|
|
(3.101) |
|||||||||||||||||||||||||||||||||
(1/r potential) |
U = −2 T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.102) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Orbital |
r0 |
= 1 + ecosφ , |
|
or |
|
|
|
|
|
|
|
(3.103) |
||||||||||||||||||||||||||||||
equation |
|
r |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
(Kepler’s 1st |
r = |
|
a(1 − e2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.104) |
||||||||||||||||||||
law) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
1 + ecosφ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rate of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sweeping area |
|
dA |
= |
|
|
J |
|
|
|
|
= constant |
|
|
|
|
|
|
|
(3.105) |
|||||||||||||||||||||||
(Kepler’s 2nd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
dt |
2m |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
law) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Semi-major axis |
a = |
|
|
r0 |
= |
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.106) |
||||||||||||||||||
|
2 |
2|E| |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
1 − e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Semi-minor axis |
b = |
|
|
|
|
|
|
|
r0 |
|
|
|
|
|
|
|
|
= |
|
|
|
J |
|
|
|
|
|
|
|
(3.107) |
||||||||||||
|
(1 − e2)1/2 |
|
(2m|E|)1/2 |
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EJ2 |
|
|
|
|
1/2 |
|
|
|
|
|
|
|
b2 |
|
|
1/2 |
|
|||||||||
|
e = 1 + |
|
|
|
= 1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Eccentricityb |
2 |
|
|
|
|
|
− |
|
|
(3.108) |
||||||||||||||||||||||||||||||||
mα2 |
a2 |
|
||||||||||||||||||||||||||||||||||||||||
Semi-latus- |
|
|
|
|
|
J2 |
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
rectum |
r0 = |
|
|
|
= |
|
|
|
|
|
|
= a(1 − e2) |
|
|
|
|
|
|
|
(3.109) |
||||||||||||||||||||||
mα |
|
a |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Pericentre |
rmin = |
|
|
|
|
r0 |
|
|
|
|
= a(1 − e) |
|
|
|
|
|
|
|
(3.110) |
|||||||||||||||||||||||
|
1 + e |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Apocentre |
rmax = |
|
|
|
|
r0 |
|
|
|
|
|
= a(1 + e) |
|
|
|
|
|
|
|
(3.111) |
||||||||||||||||||||||
|
|
1 − e |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Speed |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
v = GM |
|
|
|
|
|
|
r − a |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.112) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Period (Kepler’s |
P = πα |
|
|
|
|
|
|
m |
|
1/2 |
|
|
|
|
|
|
|
|
m 1/2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3/2 |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 2πa |
|
|
! |
|
||||||||||||||||||||||||
3rd law) |
2|E|3 |
|
|
|
|
|
α |
(3.113) |
||||||||||||||||||||||||||||||||||
U(r) potential energy
Gconstant of gravitation
Mcentral mass
morbiting mass ( M)
αGMm (for gravitation)
Etotal energy (constant)
J |
total angular momentum |
|
|
(constant) |
3 |
|
|
Tkinetic energy
· mean value
r0 semi-latus-rectum
rdistance of m from M
eeccentricity
φphase (true anomaly)
Aarea swept out by radius vector (total area = πab)
asemi-major axis
bsemi-minor axis
|
2a |
A |
m |
r |
|
|
r0 |
|
φ |
|
M |
2b ae
rmax |
rmin |
rmin pericentre distance
rmax apocentre distance
vorbital speed
Porbital period
aFor an inverse-square law of attraction between two isolated bodies in the nonrelativistic limit. If m is not M, then the equations are valid with the substitutions m → µ = Mm/(M + m) and M → (M + m) and with r taken as the body separation. The distance of mass m from the centre of mass is then rµ/m (see earlier table on Reduced mass). Other orbital dimensions scale similarly, and the two orbits have the same eccentricity.
bNote that if the total energy, E, is < 0 then e < 1 and the orbit is an ellipse (a circle if e = 0). If E = 0, then e = 1 and the orbit is a parabola. If E > 0 then e > 1 and the orbit becomes a hyperbola (see Rutherford scattering on next page).
72 |
Dynamics and mechanics |
|
|
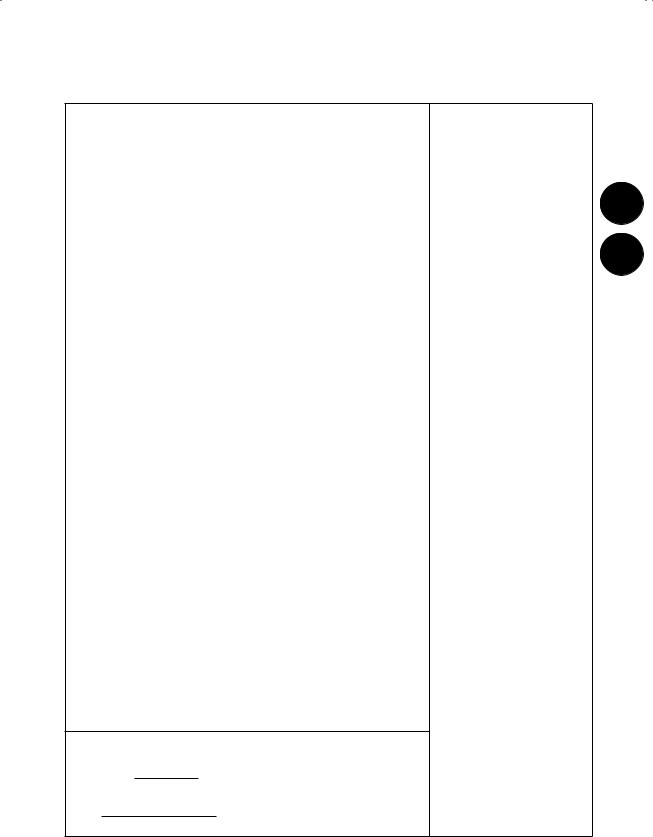
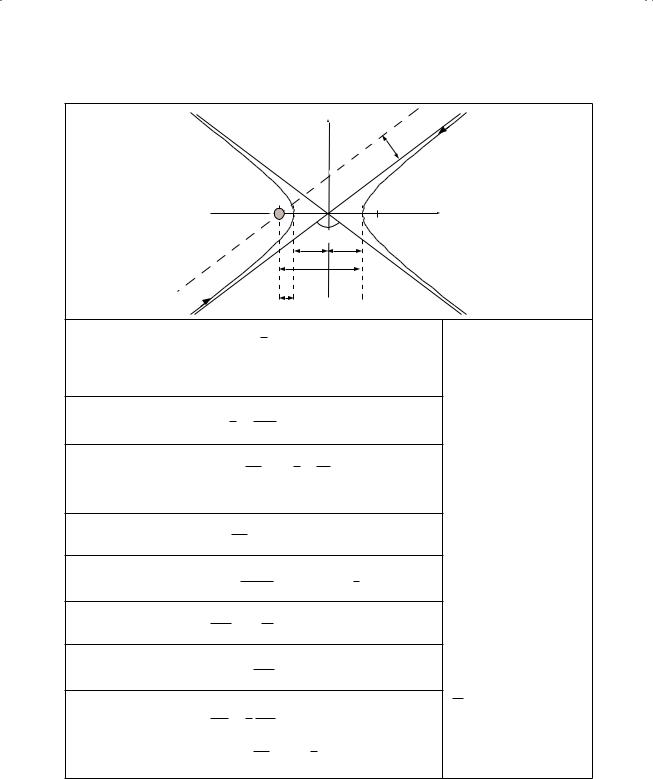
Rutherford scatteringa
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
trajectory |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
for α < 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
scattering |
|
|
|
|
|
|
|
|
|
x |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
centre |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
a |
|
χ |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
rmin (α<0) |
|
|
|
|
|||
|
|
trajectory |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
for α > 0 |
|
rmin (α>0) |
|
|
|
|
||||||||
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
Scattering potential |
U(r) = |
− r |
|
|
|
|
|
|
|
|
(3.114) |
U(r) potential energy |
||||
|
< 0 |
repulsive |
|
|
|
|
|
r |
particle separation |
|||||||
|
|
|
|
|
|
|
|
|||||||||
energy |
α"> 0 |
attractive |
|
|
|
(3.115) |
α |
constant |
||||||||
|
|
χ |
= |α| |
|
|
|
|
|
|
|
|
|
χ |
scattering angle |
||
Scattering angle |
tan |
|
|
|
|
|
|
|
|
(3.116) |
E |
total energy (> 0) |
||||
|
|
2 |
|
|
2Eb |
|
|
|
|
|
|
|
|
b |
impact parameter |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
rmin = |
|α| |
csc χ |
− |
α |
|
(3.117) |
rmin |
closest approach |
|||||||
Closest approach |
|
|
|
2E |
|
2 |
|α| |
|
|
a |
hyperbola semi-axis |
|||||
|
|
= a(e± 1) |
|
|
|
|
|
|
(3.118) |
e |
eccentricity |
|||||
Semi-axis |
a = |
|α| |
|
|
|
|
|
|
|
|
|
(3.119) |
|
|
||
|
|
2E |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
e = |
4 |
E2b2 |
+ 1 |
1/2 |
|
χ |
|
|
|
||||||
Eccentricity |
|
|
= csc |
(3.120) |
|
|
||||||||||
α2 |
|
|
2 |
|
|
|||||||||||
Motion trajectoryb |
4E2 |
|
2 |
y2 |
|
|
|
|
|
|
|
|
|
x,y |
position with respect to |
|
α2 |
x |
− b2 = 1 |
|
|
|
|
|
|
(3.121) |
|
hyperbola centre |
|||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
α2 |
|
|
|
1/2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Scattering centrec |
x = ± 4E2 + b2 |
|
|
|
|
(3.122) |
dσ |
di erential scattering |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dσ |
|
|
1 dN |
|
|
|
|
|
|
|
|
|
dΩ |
||
|
|
|
|
|
|
|
|
|
|
|
|
cross section |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Rutherford |
dΩ |
= n dΩ |
|
|
|
|
|
|
|
|
(3.123) |
n |
beam flux density |
|||
scattering formulad |
|
= |
α |
|
2 |
4 χ |
|
|
(3.124) |
dN |
number of particles |
|||||
|
|
4E ! |
csc |
2 |
|
|
|
scattered into dΩ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Ω |
solid angle |
|||||
aNonrelativistic treatment for an inverse-square force law and a fixed scattering centre. Similar scattering results from either an attractive or repulsive force. See also Conic sections on page 38.
bThe correct branch can be chosen by inspection. cAlso the focal points of the hyperbola.
dn is the number of particles per second passing through unit area perpendicular to the beam.

3.4 Particle motion |
73 |
|
|
Inelastic collisionsa
|
m1 |
|
v1 |
|
|
m2 |
v2 |
m1 v1 |
|
m2 v2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Before collision |
|
After collision |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Coe cient of |
|
v2 |
− v1 = (v1 − v2) |
|
|
|
(3.125) |
|
|
coe cient of restitution |
|
|
||||||||||
|
|
|
|
|
3 |
|||||||||||||||||
restitution |
= 1 |
|
if perfectly elastic |
(3.126) |
vi |
|
pre-collision velocities |
|
||||||||||||||
= 0 |
|
if perfectly inelastic |
(3.127) |
vi |
|
post-collision velocities |
|
|||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T ,T |
|
total KE in zero |
|
|
|
Loss of kinetic |
|
T |
− |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
= 1 |
− |
|
2 |
|
|
|
(3.128) |
|
|
momentum frame |
|
|
|||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
before and after |
|
|
||||||||
energy |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
collision |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
v1 |
= |
m1 − m2 |
v1 + |
(1 + )m2 |
v2 |
(3.129) |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
Final velocities |
|
|
|
m1 + m2 |
|
|
|
m1 + m2 |
|
|
|
mi |
|
particle masses |
|
|
||||||
|
|
|
m2 − m1 |
|
|
|
(1 + )m1 |
|
|
|
|
|
|
|
||||||||
|
|
v2 |
= |
v2 + |
v1 |
(3.130) |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
m1 + m2 |
|
|
|
m1 + m2 |
|
|
|
|
|
|
|
|
|
|||||
aAlong the line of centres, v1,v2 c. bIn zero momentum frame.
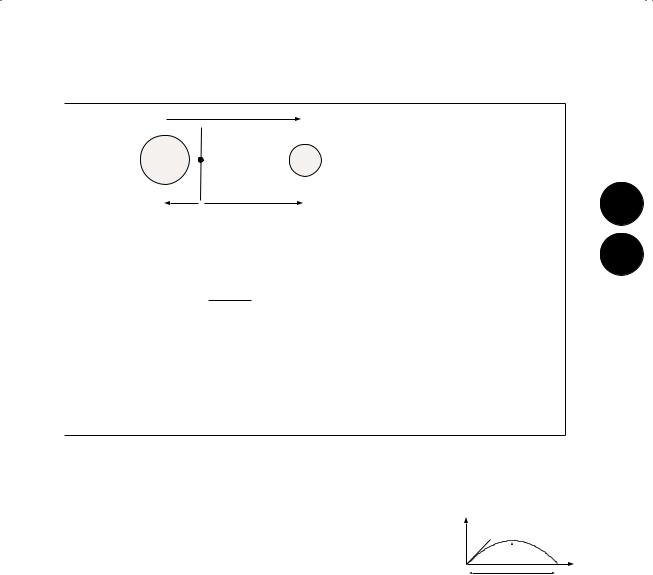
Oblique elastic collisionsa
|
|
|
|
|
|
|
|
θ2 v2 |
|
|
θ |
|
m2 |
|
|
m1 |
m2 |
Before collision |
|
|
After collision |
|
||||
|
m1 |
|
|
v |
|
|
|
θ |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
v1 |
|
|
|
m2 sin2θ |
|
|
θ |
angle between |
|
|
tanθ1 = |
|
|
(3.131) |
|
centre line and |
||
Directions of |
|
− m2 cos2θ |
|
|
||||
motion |
m1 |
|
(3.132) |
θi |
incident velocity |
|||
|
θ2 = θ |
|
|
|
|
final trajectories |
||
|
|
|
|
|
|
|
mi |
sphere masses |
|
|
> π/2 |
if m1 < m2 |
|
|
|
|
|
Relative |
θ1 + θ2 = π/2 |
if m1 = m2 |
|
(3.133) |
|
|
||
separation angle |
|
|
|
|
|
|
|
|
|
< π/2 |
if m1 > m2 |
|
|
|
|
||
|
2 |
|
2 |
|
1/2 |
|
|
|
|
v1 = (m1 + m2 − 2m1m2 cos2θ) |
v |
(3.134) |
v |
incident velocity |
|||
Final velocities |
|
|
m1 + m2 |
|
|
|
of m1 |
|
2m1v |
|
|
|
|
|
|||
|
|
|
|
|
vi |
final velocities |
||
|
v2 = m1 + m2 cosθ |
|
(3.135) |
|
|
|||
aCollision between two perfectly elastic spheres: m2 initially at rest, velocities c.