
2.3. МЕТОДЫ ПОСТРОЕНИЯ НЕПРЕРЫВНЫХ КВ ПОЛЕЙ СКОРОСТЕЙ
|
ε = |
h |
=1− |
1 |
, |
(2.3.28) |
|
h |
λ |
|
|
|
|
|
|
|
0 |
|
|
|
|
где абсолютная высотная деформация h = h0 – h1;
– отношение длины геометрического очага деформации  д к средней толщине раската hср
д к средней толщине раската hср
m = |
д |
, |
(2.3.29) |
|
|
|
h |
|
|
ср |
|
где д = R h+ 0,25 h2 ; hср = 0,5(h0 + h1); |
|
– отношение высоты подката h0 к диаметру валка Dв = 2R |
|
q = D . |
|
|
h0 |
|
(2.3.30) |
|
|
в
Легко показать, что из трех параметров ε, m и q независимыми являются только два. Достаточно знать любые два из них и хотя бы один линейный параметр, например h0, чтобы полностью определить другие основные линейные размеры геометрического очага деформации процесса прокатки.
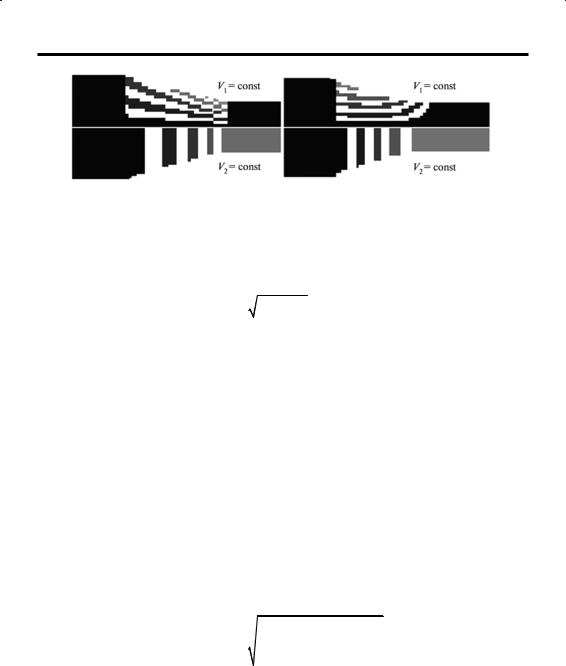
Поле скоростей (2.3.17) непосредственно не зависит от параметров (2.3.27)–(2.3.29). Все его геометрические параметры полностью определяются коэффициентом вытяжки λ (2.3.14) или относительной деформацией ε (2.3.28) и шириной полосы 2Н, в которой осуществлена суперпозиция. Из рис. 86 следует, что при λ = const (ε = const) изменением величины Н можно получить необходимое отношение (2.3.29) или (2.3.28). При этом как бы изменяется масштаб всей картины течения. Поэтому параметр Н в построенном КВ-поле скоростей (2.3.17) назван масштабным фактором.
Контрольные вопросы
1.В чем суть метода склейки разрывных полей скоростей?
2.Какие поля скоростей и в каких областях можно построить с помощью интеграла К. Шварца–Э. Кристоффеля?
3.Каково назначение вспомогательного множества координат?
4.Перечислите свойства интеграла К. Шварца–Э. Кристоффеля.
2.МЕТОДЫ РЕШЕНИЯ ЗАДАЧ МЕХАНИКИ СПЛОШНЫХ СРЕД
5.Что называется нормировкой интеграла К. Шварца–Э. Кристоффеля?
6.Перечислите основные этапы построения комплексного потенциала в полигональной области с помощью интеграла К. Шварца–Э. Кристоффеля.
7.В чем преимущества и недостатки метода склейки разрывных полей скоростей по сравнению с методом интеграла К. Шварца–Э. Кристоффеля?
8.В чем суть суперпозиции гармонических течений?
9.Какие гармонические течения называются простейшими?
10.Назовите основные этапы построения для процесса прокатки основного поля скоростей методом суперпозиции гармонических течений.
11.В чем преимущества и недостатки метода суперпозиции гармонических течений по сравнению с методом интеграла К. Шварца–Э. Кристоффеля?
12.Как использовать склеенные разрывные и непрерывные гармонические поля скоростей для построения скорректированного поля скоростей?

3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ОМД МЕТОДАМИ МСС
Индивидуальность различных процессов ОМД проявляется, как правило, не конфигурацией области течения металла, хотя и она имеет определенное значение, а главным образом – характерными для этих процессов граничными условиями, задаваемыми на основе наших априорных или апостериорных представлений об этих процессах. Так, область, представленная на рис. 88, при одних граничных условиях, как показано ниже, может быть использована для моделирования плоской прокатки, при других – плоского волочения, при третьих – плоского прессования и т. п. Отсюда вытекает важность не только познания методов моделирования, но и глубокого изучения объектов моделирования, в данном случае – процессов ОМД.
3.1.Применение разрывных КВ%полей скоростей
3.1.1.Принципы построения полей скоростей
Задача 3.1.1.1. Построить разрывное поле скоростей, соответствующее течению сплошной несжимаемой среды в сходящемся канале произвольной конфигурации (рис. 88), и определить кинематические параметры этого течения.
Решение. Учитывая несжимаемость среды, воспользуемся постоянством потока в направлении оси Е2: V0h0 = V2h. Отсюда вторая компонента вектора скорости:
где для произвольной конфигурации сходящегося канала h – текущая высота; V0 – скорость входа среды в сходящийся канал.
Условие несжимаемости обращается в тождество, если компоненты Vi вектора скорости плоского поля скоростей в эйлеровых координатах Е1, Е2 вычисляются через функцию тока < (1.2.105):
V1 |
ωȌ |
|
V2 |
|
ωȌ |
|
; |
|
. |
ω E2 |
ω E1 |
Интегрированием ранее полученной компоненты V2 получаем
Ȍ V0 |
h0 E1 . |
(3.1.1) |
|
h |
Рис. 88. Схема течения в сходящемся канале |

3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ОМД МЕТОДАМИ МСС
Далее дифференцированием этой функции по Е2, учитывая, что h = h(Е2), находим первую компоненту вектора скорости
V1 =V0 h0 E1 h′, h2
где h′ – производная h по Е2. Тогда общий вид плоского разрывного поля скоростей в сходящемся канале представляется формулой
|
h0 E1 |
h′; V2 =V0 |
h0 |
|
V1 =V0 |
|
|
. |
(3.1.2) |
h2 |
h |
Конкретный вид поля скоростей (3.1.2) зависит от вида функции h(Е2). Так, если граница сходящегося канала представлена прямой линией (прямая образующая) (1.2.117)
h = h − 2 E tg α |
, |
(3.1.3) |
|
1 |
2 |
2 |
|
|
|
|
|
|
|
|
где (рис. 88) |
|
|
|
|
|
|
tg |
α |
= |
h0 − h1 |
, |
|
(3.1.4) |
2 |
2 H |
|
|
|
|
|
|
то получаем общий вид компонент вектора скорости (3.1.2) при плоской деформации в сходящемся канале с прямолинейной образующей:
V |
= −V |
2 h0 E1 |
tg |
α |
; |
V |
=V |
h0 |
. |
(3.1.5) |
h2 |
2 |
|
1 |
0 |
|
|
2 |
0 |
h |
|
Изотахи (линии одинакового уровня компонент вектора скорости) поля скоростей, рассчитанного по формулам (3.1.5) с линейным изменением текущей высоты (3.1.3), показаны на рис. 89, а, где виден характер распределения компонент вектора скорости. Компонента V2 изменяется непрерывно, а разрыв вектора скорости на линиях Е2 = – Н и Е2 = 0 происходит лишь за счет скачкообразного изменения компоненты V1.
Если изменение текущей высоты представить в виде окружности радиуса R (круглая образующая)
h = h + 2 R− 2 |
R2 − E2 |
, |
(3.1.6) |
1 |
2 |
|
|
3.1. ПРИМЕНЕНИЕ РАЗРЫВНЫХ КВ ПОЛЕЙ СКОРОСТЕЙ
Рис. 89. Изотахи плоских полей скоростей с прямой (а) и круглой (б) образующими канала
то общий вид разрывного поля скоростей (3.1.2) представляется формулой
V1 V0 |
2h0 E1 E2 |
; V2 |
V0 |
h0 |
. |
(3.1.7) |
|
|
|
h2 R2 E22 |
|
h |
|
Характер изотах, рассчитанных по формулам (3.1.7) с изменением текущей высоты по окружности (3.1.6), показан на рис. 89, б. Видно, что компонента V2, как и в первом варианте, изменяется непрерывно, а разрыв вектора скорости на линии Е2 = – Н происходит лишь за счет скачкообразного изменения компоненты V1. При этом на линии Е2 = 0 скачок компоненты V1 отсутствует.
Теперь для произвольного закона изменения текущей высоты h = h(Е2), используя общий вид поля скоростей с компонентами (3.1.2), по формуле Дж. Стокса (1.2.137) найдем общий вид компонент тензора скоростей деформаций плоского течения
[ |
[ |
|
V |
h0 |
hc; |
[ |
[ |
|
V |
h0 E1 |
§ |
hcc |
2hc2 · |
, |
(3.1.8) |
|
|
|
|
|
|
¨ |
|
¸ |
|
|
2 |
|
|
2 |
|
11 |
|
22 |
0 |
|
|
12 |
|
21 |
0 |
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
2h |
|
© |
|
h |
¹ |
|
|
которые по формуле (1.2.162) позволяют определить интенсивность сдвиговых скоростей деформаций
|
|
h |
|
|
E2 |
§ |
2hc2 ·2 |
|
|
2V0 |
|
0 |
hc2 |
|
1 |
¨hcc |
|
¸ . |
(3.1.9) |
Ǿ |
|
2 |
|
|
|
|
h |
|
4 |
¨ |
h |
¸ |
|
|
|
|
|
© |
¹ |
|
Отметим, что полученные в процессе решения задачи поля скоростей (3.1.5), (3.1.7) могут быть использованы для оценки технологических параметров некоторых процессов ОМД в условиях плоской деформации (прокатка, прессование, волочение и др.). В частности, ниже эти поля применены для оценки пара-

3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ОМД МЕТОДАМИ МСС
|
метров процесса прокатки листового |
|
металла на гладкой бочке. |
|
Самостоятельно. Используя част- |
|
ные виды полей скоростей (3.1.5) и |
|
(1.3.7), получить компоненты тензоров |
|
скоростей деформаций и интенсивно- |
|
стей сдвиговых скоростей деформаций |
Рис. 90. Схема течения в конусном канале |
для изменения текущей высоты кана- |
|
ла по прямой и по окружности. |
Задача 3.1.1.2. В общем виде построить разрывное поле скоростей, соответствующее течению в условиях осесимметричной деформации несжимаемой сплошной среды в конусном канале произвольной конфигурации (рис. 90), и определить кинематические параметры течения среды.
Решение. В связи с несжимаемостью среды воспользуемся постоянством по-
тока в направлении оси Еz: V R2 |
V |
z |
R2 |
. Отсюда продольная компонента век- |
0 0 |
|
|
|
тора скорости (1.2.130): |
|
|
|
|
где для произвольной конфигурации конуса канала текущий радиус R является произвольной функцией координаты Еz: R = R(Еz); R0 – начальный радиус канала; V0 – скорость входа среды в конус канала.
Условие несжимаемости обращается в тождество, если компоненты Vi вектора скорости осесимметричного поля скоростей в эйлеровых координатах Еr, Еz вычисляются через функцию тока <r (1.2.128):
V |
1 |
|
ωȌr |
; |
V |
1 |
|
ωȌr |
. |
|
|
|
|
r |
Er ω Ez |
|
z |
Er |
ω Er |
|
|
|
Интегрированием ранее полученной компоненты Vz получаем
R2 Er2
Ȍr V0 0R2 . (3.1.10)
2
Далее, дифференцированием этой функции по Еz, учитывая, что R = R(Еz), находим первую компоненту компонента вектора скорости

3.1. ПРИМЕНЕНИЕ РАЗРЫВНЫХ КВ ПОЛЕЙ СКОРОСТЕЙ
где R′ – производная R по Еz. Тогда общий вид разрывного осесимметричного поля скоростей в сходящемся канале представляется формулами
|
R2 |
E |
|
|
|
R2 |
|
|
0 |
r |
′ |
|
|
0 |
|
(3.1.11) |
Vr =V0 R3 |
R |
; |
Vz =V0 R2 . |
|
Конкретный (частный) вид разрывного осесимметричного поля скоростей зависит от вида функции R(Еz). Так, если граница конусного канала представлена прямой линией (прямая образующая)
|
R = R0 – Ez tgα, |
(3.1.12) |
|
где (рис. 90) |
|
|
|
|
tgα = |
R0 − R1 |
, |
(3.1.13) |
|
H |
|
|
|
|
то общий вид осесимметричного разрывного поля скоростей (3.1.11) представляется формулами
|
|
R2 |
E |
|
R2 |
|
V = −V |
0 |
r |
tgα; |
V =V |
0 |
. |
(3.1.14) |
|
|
|
r |
0 |
R3 |
z 0 R2 |
|
Теперь для произвольного закона изменения текущего радиуса R = R(Еz), используя поле скоростей с компонентами (3.1.11), по формуле Дж. Стокса (2.23) найдем компоненты тензора скоростей деформаций
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
R2 |
E |
r |
|
3R′2 |
|
ξ |
rr |
= ξ |
ϕϕ |
= −0,5ξ |
zz |
=V |
0 |
R′; |
ξ |
rz |
= ξ |
z r |
=V |
0 |
|
|
R′′− |
|
|
, (3.1.15) |
|
|
|
3 |
|
|
|
|
0 |
R |
3 |
|
|
|
0 |
2 R |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которые по формуле (1.2.161) позволяют определить интенсивность сдвиговых скоростей деформаций:
|
R2 |
3R′2 + |
E2 |
|
3R′2 2 |
|
Η = 2V |
0 |
r |
R′′− |
|
. |
(3.1.16) |
|
|
|
0 |
R |
3 |
|
4 |
|
R |
|
|
|
|
|
|
|
|

3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ОМД МЕТОДАМИ МСС
Самостоятельно:
1) с помощью общего вида формул (3.1.14) получить компоненты вектора скорости при изменении текущего радиуса по окружности
|
Рис. 91. Изотахи осесимметричного раз9 |
R |
R |
R R |
2 E2 |
, |
(3.1.17) |
|
рывного поля скоростей |
|
|
1 |
0 1 |
r |
|
|
а также компоненты тензора скоростей деформаций и интенсивность сдвиговых скоростей деформаций для изменения текущего радиуса конуса канала по прямой (1.3.12) и по окружности (1.3.17);
2)по изотахам на рис. 91 дать описание характера изменения радиальной Vr
ипродольной Vz компонент вектора скорости.
В заключение отметим, что в этом подпункте для построенных разрывных КВ-полей скоростей вектор скорости искажения (скорости дисторции) d v в сходящемся канале отличен от нуля, так как внутри канала поле скоростей не является однородным ( v var ). Однако возможно построение таких разрывных КВ-полей скоростей, для которых во всех зонах (блоках) движения среды d v 0, а само поле скоростей внутри каждого блока является однородным ( v const ). Применение таких разрывных КВ-полей скоростей для моделирования процесса плоского прессования показано в предыдущем разделе, а для моделирования процесса плоской прокатки приведено ниже.
3.1.2. Оценка технологических параметров процесса прокатки
Задача 3.1.2.1. Используя поле скоростей (3.1.5) задачи 3.1.1.1 с изменением текущей высоты проката по линейному закону (3.1.3), определить энергосиловые параметры листовой прокатки (без учета уширения металла) в абсолютно жестких валках (принципиальная схема показана на рис. 88), полагая, что в очаге деформации моделью металла является идеальная жесткопластичная среда (Ωт = const, рис. 58, д).
Решение. При тонколистовой прокатке, когда радиус валка существенно больше высоты прокатываемого металла, допускается замена дуги с центральным углом контакта валка и прокатываемого металла хордой. В этом случае текущая высота проката меняется по линейному закону (3.1.3) и предположение об отсутствии уширения позволяет использовать плоское поле скоростей (3.1.5).
На основании этого поля скоростей составим баланс мощности Jб всех действующих на прокатываемый металл сил (1.4.43). В случае малых массовых и инерционных сил такой баланс для несжимаемых сред имеет вид

3.1. ПРИМЕНЕНИЕ РАЗРЫВНЫХ КВ ПОЛЕЙ СКОРОСТЕЙ
Jɛ ³ȉ Ǿd ȍ ³ςn V ndS = 0, |
(3.1.18) |
ȍS
где для идеальной жесткопластичной среды интенсивность касательных напряжений Т = Ωт = const (рис. 57, д); интенсивность сдвиговых скоростей деформаций Н (1.2.161) вычисляется по формуле (3.1.5) с учетом (3.1.3):
|
4V |
h |
|
|
|
4 E |
2 |
tg2 |
|
|
|
|
0 |
tg |
|
1 |
1 |
|
; |
(3.1.19) |
Ǿ |
|
|
h2 |
|
|
|
0 h2 |
2 |
|
|
|
2 |
|
|
ςn – полное напряжение на поверхности с единичной внешней нормалью n ;
V n – вектор скорости на этой же поверхности. Величины ςn и V n задаются на границе области движения сплошной среды (граничные условия) на основании решения задач 1.2.8.1 (рис. 25), 1.3.5.1 (рис. 44) и показаны для процесса прокатки на рис. 92. В общем случае прокатка может осуществляться с передним ςпер и задним ςзадн натяжениями полосы.
При вращении валков с постоянной угловой скоростью их линейная скорость на контактных поверхностях будет постоянной (Vв = const), а скорость прокатываемого металла будет увеличиваться от V0 < Vв до Vf > Vв. Очевидно, исходя из этого, на поверхности контакта металла и валка можно выделить такую точку,
называемую нейтральной точкой (Е |
= – |
ɧ ), в которой скорость металла V n |
Vɜ . |
2 |
|
|
|
До нейтральной точки (зона отставания) напряжение трения Ωот можно считать активным, так как это напряжение способствует процессу прокатки. После нейтральной точки (зона опережения) напряжение трения Ωоп можно считать реактивным, так как это напряжение препятствует процессу прокатки.
В связи с тем, что в поперечном сечении валки образуют круг и по условию задачи они не деформируются, нормальная к поверхности валков составляющая вектора скорости Vp = 0. Поэтому скалярное произведение подынтеграль-
Рис. 92. Схема к расчету параметров прокатки

3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ОМД МЕТОДАМИ МСС
ного выражения поверхностного интеграла в (3.1.18) с учетом характера напряжений трения преобразуется к виду
σn V n = τот V τ − τопV τ . |
(3.1.20) |
Полю скоростей (3.1.5) соответствует скачок вектора скорости |
Vτ за счет ком- |
поненты v1 на поверхностях E2 = 0 (h = h1); E2 = –  д (h = h0) соответственно:
д (h = h0) соответственно:
V τ =V |
|
|
|
= −V |
2h0 E1 |
tg |
α ; V τ =V |
|
|
= −V |
2 E1 |
tg α . (3.1.21) |
|
|
|
|
|
|
|
|
|
1 |
|
E |
=0 |
0 |
2 |
|
2 |
1 |
E =− |
|
0 |
2 |
1 |
|
|
h1 |
|
|
2 |
д |
|
h0 |
|
|
|
|
|
|
|
|
|
Самостоятельно. Учитывая скорость выхода металла из валков Vf = V0 h0 / h1, показать, что мощности среза на каждой из половин обеих поверхностей будут одинаковыми: 0,25 τт V0 h0 tg(α/2).
В связи с симметрией области течения металла относительно оси Е2 будем рассматривать мощность (3.1.18) в нижней половине области 0 ≤ Е1 ≤ h/2. Тогда баланс мощности (3.1.18), приходящейся на единицу ширины проката с учетом
заднего σзадн и переднего σпер |
натяжений, полагая, что среда является идеаль- |
ной и жесткопластичной (Т = |
τт = const), имеет вид |
|
|
|
|
0 |
h |
0 |
|
|
|
|
2 |
|
|
|
|
∫ τопV τ d + τт ∫ ∫ ΗdE2 dE1 + |
|
|
|
|
− н |
0 − д |
|
|
|
|
+0,5v0 h0 τтtg(α |
2)+ σзадн |
− н |
τ |
|
|
|
− σпер − ∫ τот V |
d |
= 0, |
(3.1.22) |
|
|
|
|
|
|
− д
д
где учтено, что скорость выхода металла из валков Vf = V0 h0 / h1.
Рассчитаем мощность поверхностных сил. Скорость Vτ на верхней контактной поверхности имеет компоненты V1 =V0 hh0 tg α2 ; V2 =V0 hh0 , определяемые
из (3.1.5) при E1 = − h2 . Отсюда
V τ = V12 +V22 =V0 hh0 K ,


