

Учебник
.pdf8. Смешанное и двойное векторное произведение векторов
((a ×b) ×c)y = (a ×b)z cx −(a ×b)x cz = (a ×b)z cx = axbycx ,
((a ×b) ×c)z = (a ×b)x cy −(a ×b)y cx = 0.
В итоге
(a ×b) ×c = (−axbycz , axbycx ,0).
Теперь вычислим выражение b(ac) −a(bc) : b(ac) −a(bc) = b(axcx ) −a(bxcx +bycy ) =
=(bx ,by ,0)axcx −(ax ,0,0) =
=(bxaxcx −ax (bxcx +bycy ),byaxcx ,0) =
=(−axbycy ,byaxcx ,0).
(ÄÂÏ 3.2)
(ÄÂÏ 3.3)
Как видно, координаты векторов в (ДВП 3.2) и (ДВП 3.3) совпадают, а значит, и сами векторы равны:
(a ×b) ×c = b(ac) −a(bc). ■
Существует еще более лаконичный вид второго доказательства, то есть доказательства с помощью координат. Это доказательство хорошо тем, что только оно может быть применено в многомерных векторных пространствах (размерности больших трех) при раскрытии формул аналогичных (a ×b) ×c.
Доказательство 4
Воспользуемся определением векторного произведения через символ Леви-Чивита. Тогда двойное векторное произведение может быть записано в виде:
|
|
i=3 |
j=k k=3 |
|
|
(a ×b) ×c = ∑∑∑εijk (a ×b)icjek = |
|||
|
|
i=1 |
j=1 k=1 |
|
i=3 |
j=k k=3 |
|
|
|
|
|
|
|
∑ anbmcjek εijk εimn . |
= ∑∑∑εijk ∑εimnanbm cjek = |
||||
i=1 |
j=1 k=1 |
|
|
i, j,k ,m,n |
m,n |
|
|||
133

I. Векторная алгебра
В последнее выражение входит произведение тензоров Леви- Чивита, которое равно
i=3
∑εijk εimn =δ jmδ km −δ jnδ km. i=1
Используя это соотношение, для исходного произведения (a ×b) ×c получаем
(a ×b) ×c = ∑ anbmcjek (δ jmδ km −δ jnδ km ) = i, j,k ,m,n
= ∑(ajbk cjek −akbjcjek ) = b(ac) −a(bc). j,k
Здесь мы использовали известные выражения:
∑aj cj = (ac)
j
è ∑bkek = b. k
Ключевым для данного доказательства является соотношение для произведения символов Леви-Чивита. Это соотношение можно проверить простым перебором всех компонент. ■
Отметим еще раз, что особенностью последних трех доказательств является необходимость привлечения координатного представления векторов. В то же время, даже согласно своему определению векторное произведение полностью определено и в том случае, когда не введена какая бы то выло система координат. Значит, должны существовать доказательства соотношения (a ×b) ×c = b(ac) −a(bc), исходящие из определений векторного и скалярного произведений. Вот одно из таких доказательств, любезно предоставленное автору учебника студентом ФТФ ХНУ Голубовым А. А.:
Доказательство 5
1.Приведем только идею доказательства для одного частного случая. Остальные варианты расположения векторов рассматриваются аналогичным образом.
2.Представим вектор c в виде суммы двух слагаемых c = c|| +c , первое из которых компланарно векторам a è b, а второе ортогонально этим векторам. Тогда в двойном векторном произведении останется только компонент c|| :
134

8. Смешанное и двойное векторное произведение векторов
(a ×b) ×c = (a ×b) ×(c|| +c ) = (a ×b) ×c||. (ÄÂÏ 5.1)
В качестве примера рассмотрим одно возможное взаимное расположение трех векторов a, b è c|| на плоскости, которой они компланарны.
Ðèñ. 8.2. К доказательству 5
Векторы a è b образуют некоторый базис на этой плоскости. Потому вектор (a ×b) ×c = OD можно разложить по этим векторам:
(a ×b) ×c = (a ×b) ×c|| = OD ≡ ka +lb. |
(ÄÂÏ 5.2) |
Для вычисления коэффициентов разложения опустим из точ- ки D перпендикуляр на прямую OA и отметим точку E — основание этого перпендикуляра. Тогда величина
|
DE |
|
= |
OD |
sin γ = |
OB |
sinα. |
(ÄÂÏ 5.3) |
||||||||||||||||||
|
|
|||||||||||||||||||||||||
Отсюда находим коэффициент l : |
|
|||||||||||||||||||||||||
|
|
l = |
|
OB |
|
= |
|
OD |
|
sin γ |
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(ÄÂÏ 5.4) |
|||||||
Величина |
|
|
b |
|
|
|
|
|
|
|
b |
|
sinα |
|||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
OA |
= |
OD |
cosγ − |
OB |
cosα. |
(ÄÂÏ 5.5) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножим это соотношение на sinα и исключим из него величину OB sinα с помощью равенства (ДВП 5.3):
OA sinα = OD (cosγ sinα −sin γ cosα )= OD sin(α −γ ). (ÄÂÏ 5.6)
135

I. Векторная алгебра
Отсюда для коэффициента k получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k = |
|
OA |
|
= |
|
|
|
OD |
|
|
sin(α −γ ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(ÄÂÏ 5.7) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
sinα |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Теперь можно записать явное выражение для вектора (a ×b) ×c. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(a ×b) ×c = OD = ka +lb = |
|
|
|
|
|
|
|
|
|
sin(α −γ ) |
a + |
|
OD |
|
|
sin γ |
b. |
(ÄÂÏ 5.8) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
OD |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
sinα |
b |
sinα |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Длина вектора |
|
|
|
|
= |
|
(a ×b) ×c|| |
|
= |
|
a ×b |
|
c|| |
|
|
|
|
|
|
|
= |
|
a |
|
|
|
b |
|
c|| |
|
sinα. Ñëå- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
OD |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
довательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
(a ×b) ×c|| |
= OD = ka +lb = a |
|
b |
|
|
|
c|| |
|
sin(α −γ ) +b |
|
a |
|
|
|
c|| |
|
sin γ . (ÄÂÏ 5.9) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Дальше |
|
|
|
|
|
|
воспользуемся |
|
|
перпендикулярностью |
векторов |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(a ×b) ×c|| |
= OD è c|| , из которой следует, что γ = β −90 . Тогда |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
из (ДВП 5.9) окончательно получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(a ×b) ×c = (a ×b) ×c|| = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
= a |
|
b |
|
|
|
c|| |
|
sin(α − β +90 ) +b |
|
a |
|
|
|
c|| |
|
sin(β −90 ) = |
(ÄÂÏ 5.10) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
= a |
|
b |
|
c|| |
|
cos(α − β ) −b |
|
a |
|
|
c|| |
|
cos β = |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
= a(bc|| ) −b(ac|| ) = a(bc) −b(ac). ■ |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
8.5. Задачи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача 8.3 (продолжение задачи 6.1). Найти компонент вектора a, ортогональный вектору b ≠ 0.
Решение. В задаче 6.1 был найден компонент a|| вектора α , параллельный ненулевому вектору b :
= (ab) a|| b (bb) .
136
8. Смешанное и двойное векторное произведение векторов
Отсюда можно найти компонент a вектора a, перпендикулярный вектору b :
= − (ab) a a b (bb) .
Теперь приведем правую часть этого выражения к общему
знаменателю: |
|
|
|
|
a = a −b |
(ab) |
= |
a(bb) −b(ab) |
. |
(bb) |
|
|||
|
|
(bb) |
||
В числителе стоит не что иное, как двойное векторное произведение (b ×a) ×b. Значит, искомое выражение для a выглядит так:
a == (b ×a) ×b) . (bb)
Задача 8.4 (окончание задачи 8.2). Упростить выражение
((b ×c),(c ×a),(a ×b)) = (b ×c) ×(c ×a) (a ×b).
Решение. Для решения задачи рассмотрим двойное векторное произведение (b ×c) ×(c ×a), где в качестве первого вектора возьмем (b ×c), второго — c, а третьего — a.
Тогда:
(b ×c) ×(c ×a) = c((b ×c) a) −a(c (b ×c)) = c(a,b,c).
Умножая это произведение на (a ×b), получаем:
(a ×b) c(a,b,c) = (a,b,c) (a,b,c) = (a,b,c)2 .
Таким образом, мы показали, что некомпланарность векторов a ×b, b ×c è c ×a эквивалентна некомпланарности векторов a, b è c, òî åñòü:
((b ×c),(c ×a),(a ×b)) = (a,b,c)2 .
137

I. Векторная алгебра
Задача 8.5. Доказать, что |
|
|
|
|
|
(a ×b) (c ×d) = |
|
(a c) |
(b c) |
|
. |
|
|
||||
|
|
(a d) |
(b d) |
|
|
Решение. Величина (a ×b) (c ×d) представляет собой смешанное произведение трех векторов (a ×b,c,d). Следовательно, в нем можно переставить знаки местами:
(a ×b) (c ×d) = {(a ×b) ×c} d.
В фигурных скобках стоит двойное векторное произведение, которое раскрываем согласно правилу:
{(a ×b) ×c} d ={b(ac) −a(cb)} d.
Раскрывая фигурные скобки, окончательно получаем искомое соотношение:
{b(ac) −a(cb)} d = (bd)(ac) −(ad)(cb) = |
|
(a c) |
(b c) |
|
. |
|
|
|
|||||
|
|
(a d) |
(b d) |
|
|
|
Отметим частный случай соотношения |
(a ×b) (c ×d) = |
|||||
= (bd)(ac)−(ad)(cd), в котором векторы a è |
c, |
а также b |
||||
è d совпадают:
(a ×b) (a ×b) = (aa)(bb) −(ab)(ab).
Это соотношение связывает длины векторного и скалярного произведения двух векторов:
(a ×b)2 = a2b2 −(ab)2 .
Причем последнее соотношение может быть доказано прямо из определений длин векторного и скалярного произведения:
(a ×b)2 = a 2 b 2 sin2 ( ab) = a 2 b 2 − a 2 b 2 cos2 ( ab).
138

8. Смешанное и двойное векторное произведение векторов
Это равенство справедливо в силу соотношения cos2 α +sin2 α =1.
Задача 8.6 (для самостоятельного решения). Доказать, что
V 2 |
|
(a a) (a b) (a c) |
|
|
|
|
|||
= |
(b a) (b b) (b c) |
|
. |
|
abc |
|
|
|
|
|
|
(c a) (c b) (c c) |
|
|

9. ПРЕОБРАЗОВАНИЯ СИСТЕМЫ КООРДИНАТ
Мы рассмотрели различные ортогональные системы координат — декартовы, полярные, сферические и цилиндрические. При этом одной из наших задач было определение связи между координатами в различных системах. Знание таких связей позволяет подбирать для решения задач такие системы отсчета, в которых решение существенно упрощается. Ведь зачастую условия даются
âтаких системах отсчета, в которых сама задача выглядит просто, а решение при этом принципе возможно, но оказывается слишком громоздким.
Для физики классическим примером такого перехода является переход от лабораторной системы отсчета, в которой покоящийся наблюдатель производит измерения начальных условий, к системе центра инерции взаимодействующих тел,
âкоторой производятся расчеты. При решении различных задач математической физики или в квантовой механике постоянно используются переходы между различными базисами, в которых базисным векторам соответствуют не только обычные пространственные координаты, но и различные математические функции или квантовые состояния физических систем.
При исследовании различных реакций координатами могут быть количества того или иного реагента, поэтому такие координаты называются естественными. В то же время расчет таких реакций удобно проводить в других координатах, которые в некотором смысле ортогональны между собой, и поэтому называются нормальными.
140

9. Преобразования систем координат
Даже в компьютерной и телевизионной технике применяется преобразование координат. Дело в том, что цветное изображение на экране монитора, телевизора или в памяти компьютера нужно представлять в координатах, определяющих количество красного, синего и зеленого цветов. В тоже время при переносе этого изображения на бумагу требуется переход в другую систему отсчета — а именно в систему, в которой каждый цвет определяется количеством желтой, голубой и пурпурной красок, необходимых для точной передачи этого цвета.
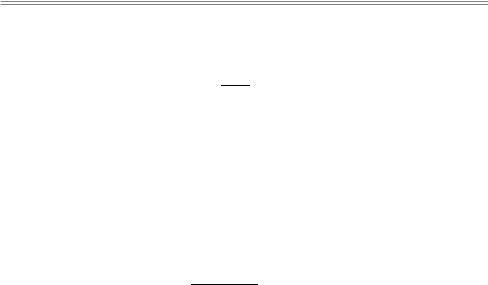
Ðèñ. 9.1. Координаты одного и того же вектора в различных системах координат
Этот пример нам кажется наиболее интересным, поэтому ему будет посвящен отдельный раздел в этом учебнике. А пока мы вернемся к преобразованию координат в декартовых системах отсчета.
9.1. Вектор и точка в различных системах отсчета
Представим, что на плоскости задан некоторый вектор a единичной длины. Предположим, что на плоскости заданы три различные системы координат, K, K ′, K ′′, повернутые друг относительно друга на 45 градусов (см. рис. 9.1). Тогда в системе отсчета K этот вектор будет иметь координаты x =1 è y = 0. В системе отсчета K′ его координаты будут совсем другие x′ = 0
141
I. Векторная алгебра
è y′ = −1. А в системе отсчета K′′ у этого же вектора вообще не будет равных нулю координат: x′′ = 12 è y′′ = 12 . Â òî æå
время сам вектор как геометрический или физический объект не изменился: он так и остался нарисованн на том же месте.
Таким образом, вектор — это нечто большее, чем абстрактный набор чисел, размещенных по порядку внутри скобок. Этот набор чисел должен содержать в себе информацию о каком-то объекте, который существует вне зависимости от того, какая система отсчета выбрана и выбрана ли она вообще.
В качестве примера рассмотрим длину вектора, которая оказывается неизменной, в какой бы из систем координат мы ее не вычисляли:
|
|
|
2 |
|
2 |
|
2 |
|
2 |
|
|
1 2 |
|
1 |
2 |
|
2 |
2 |
|
||
a |
|
x |
+ y |
|
|
|
|
|
|
||||||||||||
= |
|
|
= |
1 |
+0 |
|
= |
|
|
|
+ |
|
|
= |
0 |
|
+1 |
=1. |
|||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Другое свойство вектора — направление — также должно определяться координатами. Следовательно, для того, чтобы координаты в различных системах отсчета определяли вектор одного и того же направления, они должны быть однозначно связаны между собой, причем по какому-то строго определенному закону. В этом разделе мы займемся выводом такого закона преобразования координат.
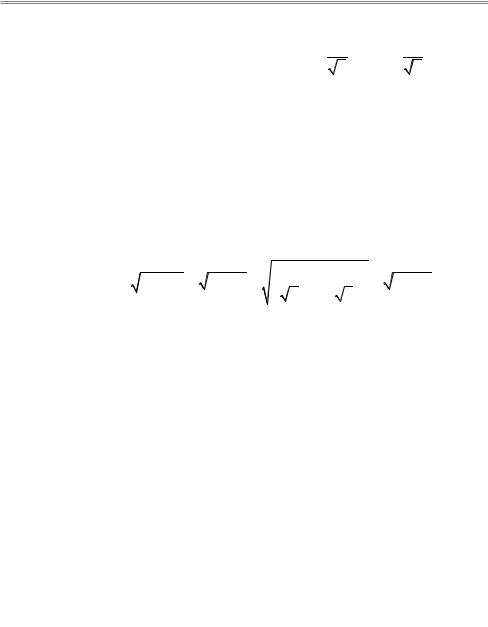
Ðèñ. 9.2. Координаты одной и той же точки в различных системах координат
142