

§1.4. Свободные колебания в динамических системах с распределенными элементами
В технике радиосвязи, радиолокации, в устройствах техники СВЧ, микроэлектроники и других широкое применение получили элементы, у которых размеры сравнимы или больше длины волны l>λ, К таким элементам относятся линии передачи энергии (двухпроводные, коаксиальные и микрополосковые линии, волноводы и др.).
Электрические цепи, для которых волновой характер процесса представляет основу используемых свойств цепи, а замена распределенных элементов сосредоточенными приводит к утрате этих основных свойств цепи, называют цепями с распределенными элементами. Токи и напряжения в таких цепях являются функциями координат сечения наблюдения цепи и времени t.
При составлении систем уравнений с распределенными элементами возникают трудности: I) не выполняются законы Кирхгофа; 2) очень сложно произвести выбор реальной модели цепи с распределенными элементами; 3) напряжения и токи зависят не только от времени, но и от пространственных координат.
В связи с тем, что линии передачи сигналов являются составной частью радиотехнической цепи, для анализа и синтеза которой необходимо знать напряжение и токи в линиях, широкое применение получили методы теории электрических цепей. Возможность применения указанных методов основывается на представлении о линии в виде цепи с большим числом бесконечно малых по величине пассивных элементов или, иными словами, о линии как о цепи с распределенными (по ее длине) элементами. В соответствии с этим используются понятия о так называемых погонных (распределенных) параметрах линии: резистивном сопротивлении R0, индуктивности L0 , емкости С0 и проводимости Go единицы длины линии. Их значения находят в общем случае методами теории электромагнитного поля.
Дифференциальные уравнения, связывающие в некоторый момент мгновенные значения токов и напряжений, имеют следующий вид:
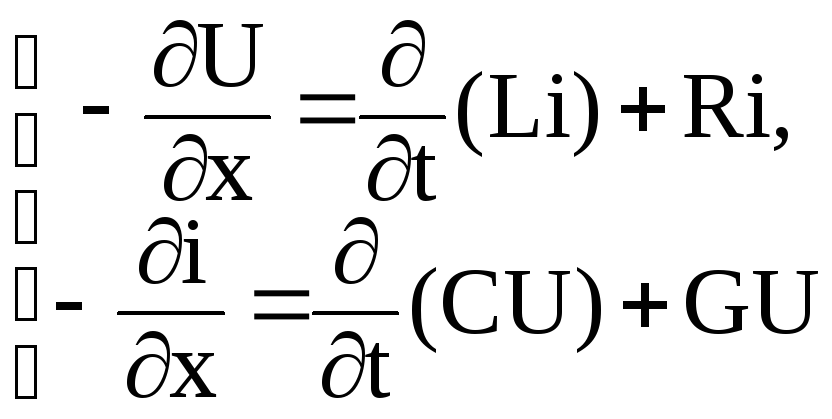
и часто называются телеграфными уравнениями, что обусловлено исторически, когда впервые применили линии связи для передачи телеграфных сигналов. Совместное решение дифференциальных уравнений в частных производных при заданных начальных и граничных условиях позволяет в каждом конкретном случае решить поставленную задачу на отыскание мгновенных значений токов и напряжений в линии.
§1.4.1.Классификация длинных линий
Если погонные параметры линии R, L, С и G постоянные во времени и пространстве величины, то такую линию называют однородной в пространстве и инвариантной во времени линейной линией.
Если погонные параметры R, L, С и G зависят от времени, линия называется параметрической.
Если параметры R, L, С и G представляют собой функции напряжения U и тока
i , то такая линия называется нелинейной.
§1.4.2.Построение решений уравнений длинных линий (телеграфных уравнений) операторным методом
Несмотря на внешнюю простоту телеграфных уравнений, их аналитическое решение для произвольных сопротивлений генератора и нагрузки и сигнала произвольной формы отсутствует. Применение операторного метода, как было показано ранее, позволяет существенно упростить отыскание мгновенных значений напряжения U(x,t) и тока i (x,t ).
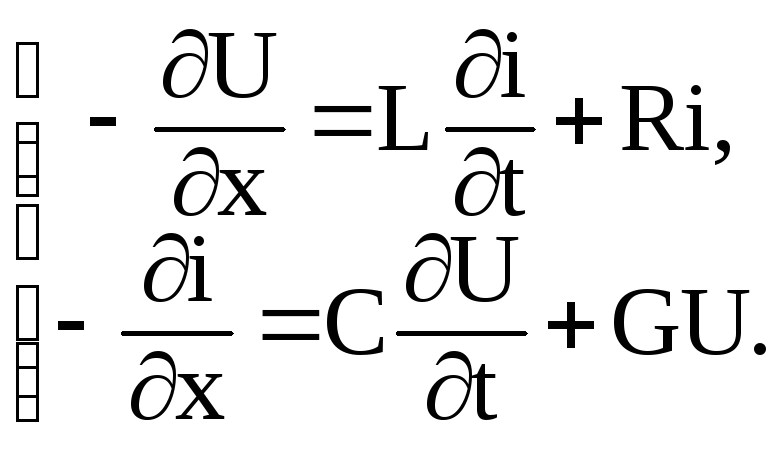
Ограничимся рассмотрением линейной, однородной, инвариантной во времени длинной линией. В этом случае уравнение будет иметь вид:
Напряжение U (x,t ) и токи i (x,t ) в длинной линии, а также источники, как и ранее удовлетворяют условию принадлежности к классу оригиналов.
В этом случае
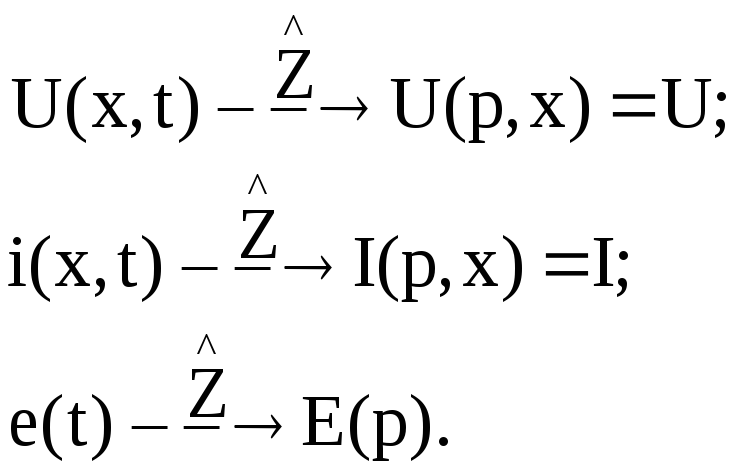
Применяя преобразование Лапласа к системе уравнений, получим систему операторных уравнений в полных производных:
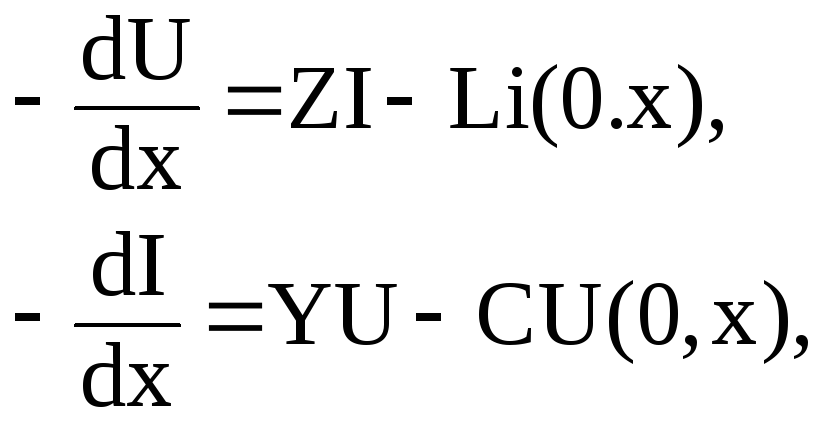
где Z=pL + R; Y=рC+G ; либо одно дифференциальное уравнение второго порядка:
![]()
где
![]() - операторная постоянная распространения
волны;
- операторная постоянная распространения
волны;![]() - функция начальных условий. Решение
уравненияU
(x,
p)
состоит из
общего решения однородного дифференциального
уравнения и какого либо частного решения:
- функция начальных условий. Решение
уравненияU
(x,
p)
состоит из
общего решения однородного дифференциального
уравнения и какого либо частного решения:
U(p,x)=A1e-γx+ A2eγx+U0.
Тогда из первого уравнения системы находим:
![]()
где
![]() - операторное волновое сопротивление;
коэффициентыА1(р)
и A2(р)
определяются
из граничных условий.
- операторное волновое сопротивление;
коэффициентыА1(р)
и A2(р)
определяются
из граничных условий.
Решение операторной системы уравнений для изображения напряжения U(р,x) и тока I(р,x) найдено. Осуществив обратное преобразование Лапласа, восстанавливают оригиналы напряжения U( x, t) и тока I(х,t ). Однако решение в общем случае отыскать не удается. Рассмотрим некоторые частные случаи.
Линия без потерь
В
этом случае R=G=
0 и
![]()
![]() .
Тогда
.
Тогда
![]()
Осуществляя обратное преобразование Лапласа, получим:
![]()
где
![]()
Следовательно,
решение представляется в виде суммы
прямой
![]() и обратной
волны
и обратной
волны
![]() .
.
Линия без искажений
Для
данной линии характерно выполнение
соотношения
![]() .Следовательно,
.Следовательно,
![]()
Изображение напряжения в линии есть
![]()
Осуществляя обратное преобразование Лапласа, получим:
![]()
Следовательно, для линии без искажений мгновенные значения напряжения и тока представляют собой наложение прямой и обратной волн, затухающих в процессе распространения. Для линейных цепей с распределенными параметрами справедлив принцип наложения, и, следовательно, задачи анализа свободных и вынужденных колебаний могут рассматриваться порознь, аналогично цепям с сосредоточенными параметрами.