

Лекции Алексеевой
.pdfСовокупность относительных линейных деформаций по всем координатным направлениям, и углов сдвига между координатными направлениями, проходящими через точку тела называется деформированным состоянием в точке тела.
В теории упругости установлено, что между теориями напряженного и
деформированного состояний существует полная математическая аналогия. Все формулы второй теории могут быть получены из формул первой с заменой
, |
|
1 |
|
|
|
2 |
|
с сохранением их индексов.
На основании аналогии можно утверждать, что деформированное состояние в точке будет известно, если задан тензор деформаций
|
|
x |
1 |
yx |
1 |
|
|
|
|||
|
|
2 |
2 |
zx |
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
1 |
|
|
||
T |
|
xy |
|
y |
|
|
. |
||||
|
|
2 |
|
|
|
2 |
|
zy |
|||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
xz |
yz |
z |
|
||||||
|
|
2 |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
Тензор деформаций, как и тензор напряжений,
определяется 6 компонентами (величинами).
Главные деформации. Главные оси деформированного состояния
В каждой точке тела существуют такие оси координат, относительно которых углы сдвига равны нулю – главные оси деформированного состояния. Линейные деформации по этим осям – главные деформации1 2 3 . По аналогии их определяют из кубического уравнения
3 |
I |
2 |
I |
2 |
|
гл |
I |
3 |
0. |
гл |
1 |
гл |
|
|
|
|
Коэффициенты уравнения – инварианты деформированного состояния. Они как и главные деформации не зависят от выбора системы координат
I1 x y z 1 2 3,
I2 x y y z z x 14 2xy 14 2yz 14 2xz 1 2 2 3 1 3,
|
|
|
|
x |
1 |
|
yx |
1 |
|
zx |
|
|
|
|
||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
||||
I |
3 |
|
1 |
|
xy |
|
y |
1 |
|
zy |
|
|
|
. |
||||
|
|
2 |
|
|
|
|
2 |
|
|
1 2 |
|
3 |
|
|||||
|
|
|
1 |
|
xz |
1 |
|
yz |
|
z |
|
|
|
|
||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
||||
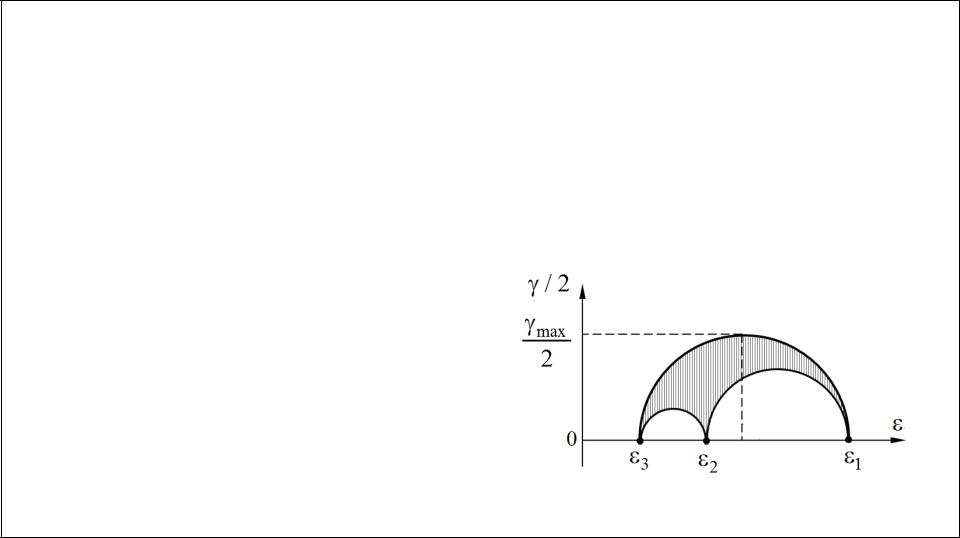
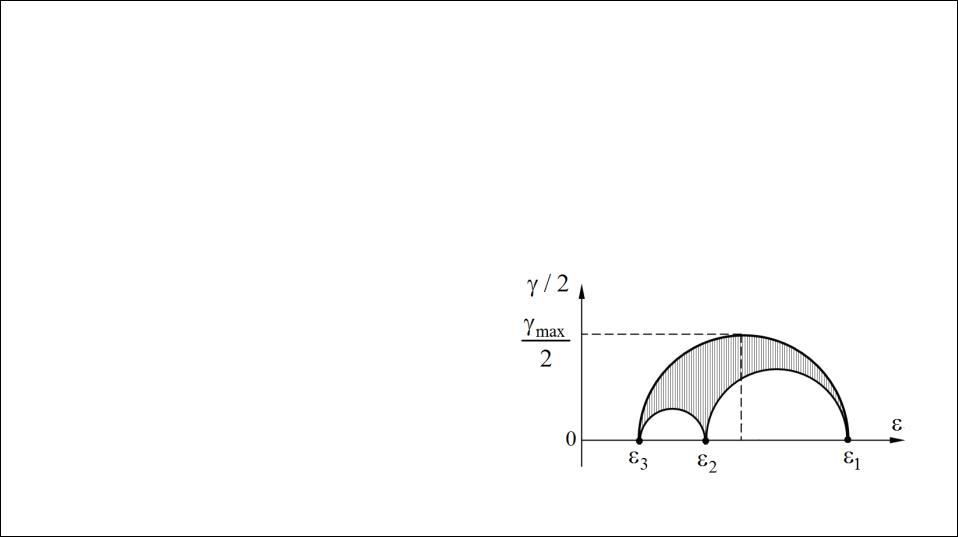
Аналогично, как и для напряженного состояния можно построить
круги Мора деформированного состояния
max 1 3
–максимальный угол сдвига

Сопротивление материалов
К.т.н., доцент Елена Геннадьевна Алексеева
Главные деформации. Главные оси деформированного состояния
В каждой точке тела существуют такие оси координат, относительно которых углы сдвига равны нулю – главные оси деформированного состояния. Линейные деформации по этим осям – главные деформации1 2 3 . По аналогии их определяют из кубического уравнения
3 |
I |
2 |
I |
2 |
|
гл |
I |
3 |
0. |
гл |
1 |
гл |
|
|
|
|
Коэффициенты уравнения – инварианты деформированного состояния. Они как и главные деформации не зависят от выбора системы координат
I1 x y z 1 2 3,
I2 x y y z z x 14 2xy 14 2yz 14 2xz 1 2 2 3 1 3,
|
|
|
|
x |
1 |
|
yx |
1 |
|
zx |
|
|
|
|
||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
||||
I |
3 |
|
1 |
|
xy |
|
y |
1 |
|
zy |
|
|
|
. |
||||
|
|
2 |
|
|
|
|
2 |
|
|
1 2 |
|
3 |
|
|||||
|
|
|
1 |
|
xz |
1 |
|
yz |
|
z |
|
|
|
|
||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
||||
Аналогично, как и для напряженного состояния можно построить
круги Мора деформированного состояния
max 1 3
–максимальный угол сдвига

Объемная деформация Объемная деформация – это относительное изменение объема в точке.
Объем при сдвиге не меняется, изменение объема происходит только за счет линейных деформаций
до нагружения |
после нагружения |
dV dx dy dz |
dV1 dx1 dy1 dz1 |
dx1 dx dx |
dy1 dy dy |
dz1 dz dz |
||||
Линейная деформация равна |
x |
dx |
, |
тогда |
dx εxdx . |
|
|
||||||
|
|
dx |
|
|
|
|
dx1 dx εxdx dx(1 εx ) , dy1 |
dy (1 εy ), |
dz1 dz (1 εz ) |
||||
Объем элемента после деформаций равен |
|
|
||||
dV1 dx1 dy1 dz1 dx(1 εx ) dy(1 εy ) dz(1 εz ) |
||||||
dx dy dz (1 εx εy εz εxεy εyεz εzεx εxεyεz ) |
||||||
|
|
|
||||
dV |
|
|
|
малыевысшего порядка |
||
Линейная деформация очень мала по сравнению с единицей.
Обычно это величина порядка 10-3, т.е. 10-3. Тогда произведение деформаций мало по сравнению с самой деформацией. Тогда
dV1 dV (1 εx εy εz ) .
Относительное изменение объема e равно изменению объема, деленному на первоначальный объем
|
dV dV |
|
dV (1 εx εy εz ) dV |
|
|
e |
1 |
|
|
, |
|
dV |
|||||
|
dV |
|
|
e εx εy εz
Относительное изменение объема равно сумме линейных деформаций. Таким образом, первый инвариант деформированного состояния равен объемной деформации
I1 e.